基于LSTM的GPS卫星钟差预测算法*
2023-12-11 12:10李旻
舰船电子工程 2023年9期
李 旻
(海军装备部驻无锡地区军事代表室 无锡 214105)
1 引言
随着全球卫星导航系统的不断发展与完善,卫星导航与授时的应用已经深入社会发展的各个层面。随着社会的不断发展,对导航定位和授时精度的要求也越来越高,卫星导航定位的精度本质上也是对时间的高精度测量。但卫星提供时间的精度程度受到众多条件制约,如卫星钟本身的精确程度、实时精密卫星钟差、大气延迟修正和卫星自身硬件条件等。虽然目前国际上已经出现了光钟的系统误差的不确定度达到9E-19 量级[1],但卫星钟的系统误差还达不到如此高的精度,如在现有条件下提高卫星导航、定位和授时的精度,就需要尽可能提高卫星钟差预测的精度,为进一步提高卫星导航、定位和授时精度创造条件。目前导航卫星上使用的大部分还是铷原子钟[2],现有条件下常用的提高定位和授时精度的方法是通过合适算法对钟差等主要误差进行预测,进而提高导航、定位和授时精度。在卫星钟差预测领域,目前使用的较为广泛的预测模型包括多项式模型[3]和灰色模型[4~5]等,但是其预测精度不能满足在特定条件下的应用需求,LSTM 算法是一种时间循环神经网络,非常适用于对时间序列中的间隔和延迟较长事件的处理和预测[6],因此本文将重点分析利用LSTM 应用在钟差预测中的算法,并期望可以实现对卫星钟差更好的预测。
2 多项式模型
多项式模拟是一个对时间序列的特定趋势进行了很好逼近的数学模型,能够运用在短时预报和长时间预测中,尤其是在短期预报中有着良好的拟合精度。
多项式模型在钟差预测的研究中得到广泛的应用,其中的二次多项式模型(QP 模型)在钟差的预测中最为常用,其结构简单,且其确定性参数在钟差的预报中具有实际的物理意义。
QP模型的观测方程为
其中,vi=a0+a1(ti-t0)+a2(ti-t0)2-Ti为vi=a0+a1(ti-t0)+a2(ti-t0)2-Ti时的卫星钟差;vi=a0+a1(ti-t0)+a2(ti-t0)2-Ti为参考时间(一般取为数据序列的初始时刻);vi=a0+a1(ti-t0)+a2(ti-t0)2-Ti为当前钟差时间;vi=a0+a1(ti-t0)+a2(ti-t0)2-Ti、vi=a0+a1(ti-t0)+a2(ti-t0)2-Ti和vi=a0+a1(ti-t0)+a2(ti-t0)2-Ti为模型的待求数据,分别表示参考时刻vi=a0+a1(ti-t0)+a2(ti-t0)2-Ti的卫星钟差、钟速以及卫星钟的频漂变化;vi=a0+a1(ti-t0)+a2(ti-t0)2-Ti为观测误差,人们通常认为它是正态分布[7~9]。
根据观测方程可以得到对应的误差方程为
按照最小二乘的平差原理,当钟差数超过三个时,即可解得参数的最或然值为
则可以得到钟差预报的QP模型为
3 长短时间记忆网络(LSTM)
循环神经网络(Recurrent Neural Network,RNN)是一种用来处理时间顺序信息的神经网络[10]。RNN 最早应用于自然语法处理领域,随着深度学习的推广,被应用于电力系统的负荷预测等领域。普通的神经网络模型结构由输入层、隐藏层和输出层组成,因为输入层、隐藏层和输出层是单向的,而在隐藏层的节点之间又是没有联系的,所以普通的神经网络通常都不用来保存序列数据。但因为RNN 中在当前时间输出的序列,也会与在当前时刻输出的序列相关联,所以隐藏层之间的节点也并非是无连接的,而是有连接的,同时隐藏层的输入也不仅包括当前时间输入层的输出,而且包括当前一时间隐藏层的输出。
由于循环神经网络的结构难以训练,使得在实际应用中很难解决对这种结构长时间的依赖,于是由Hocheriter 和Schmidhuber 联合提出了一种经改进后的循环神经网络:长短期记忆网络[11]。LSTM目前已在自然语言处理、图像描述、语音识别等领域成功的应用[12]。
原始RNN 的隐藏层只有一组状态h,它对短期的输入变化非常敏感。而LSTM 增加了一组状态c,利用c 可以维持更长期的状态,c 称为单元状态(cell state)。LSTM 单元只有三种性质的门,分别为遗忘门ft、输入门it和输出门ot。门实际上是一层全连接层,因为它的输入是一个向量,而输出则是0~1 之间的实数向量。当输出值为0 时,表示输入的信息不能通过。当输出为1 时,表示输入的所有信息可以通过。LSTM对信息的记忆与更新由这三种门控制实现。门的一般形式可以表示为
其中,W 是门的权重向量,b 是偏置项。σ为sigmoid函数,值域是(0,1) 。
遗忘门和输入门用来管理单元状态c 的信息。遗忘门决定上一时刻的单元状态ct-1有多少保留到当前时刻ct;输入门决定当前时刻的输入xt有多少保存到单元状态ct。此外,还有输出门来控制单元状态ct下有多少能够输出到LSTM 的当前输出值ht[13]。下文中,分别以f、i和o代表遗忘门、输入门和输出门。LSTM 单元内传播结构如图1所示。
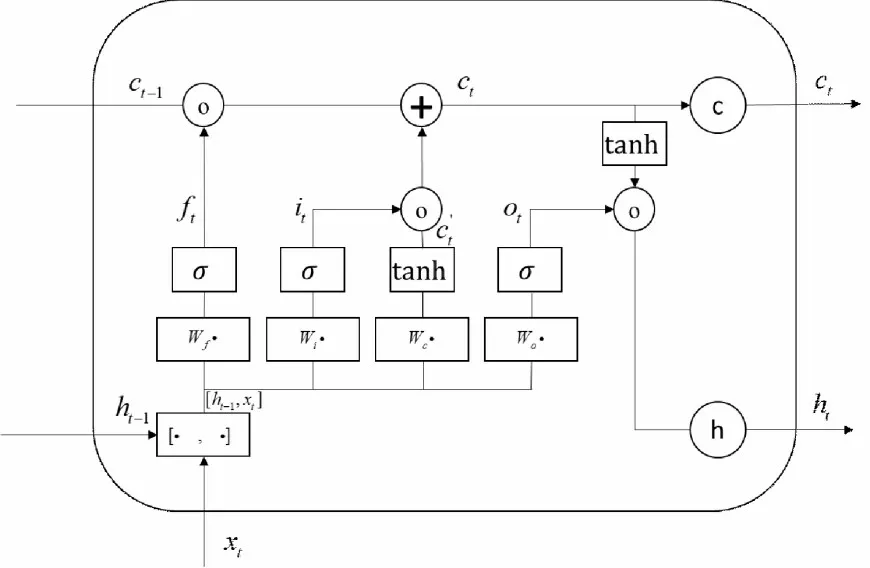
图1 LSTM单元内传播结构


LSTM最终的输出由输出门和单元状态共同确定:
LSTM 的训练方法和RNN 同样是反向传播方法,包括三个阶段:
1)前向计算每个神经元的输出值,式(6)~式(10)即为LSTM的前向计算过程。
3)根据相应的误差项,获得每个权重的梯度。
4 算例与分析
4.1 数据来源
为检验LSTM 模型的准确性,从IGS 服务器(https://cddis.nasa.gov/archive/gps/products/)可下载2021年9月12日至2021年9月13日一共两天的钟差产品的预报实验,数据的采样间隔为5min。目前在轨的GPS 卫星共有30 颗可用,各卫星钟的类型如表1所示。

表1 卫星钟类型
由表1可知,30颗在轨工作卫星共分为四种类型,其中Block IIF 中有一颗Cs 钟,其他的卫星钟均为Rb 钟,所以进行实验的卫星钟数据选择为PRN2,PRN1和PRN4号卫星钟。
4.2 建模方案
用12h 的钟差数据进行建模后预报,选用二次多项式模型(QP)、灰色模型(GM(1,1))和长短时间记忆网络模型(LSTM),用12h 的钟差数据建模,分别预报未来1h和3h的钟差数据。
4.3 预报结果和分析
本试验中所用的资料是由IGS 服务器下载的事后钟差产品,它自身的时间偏差值较小,在本试验中可以作为“真值”使用。另外采用RMS 作为统计量,去衡量模型的优劣程度,计算公式如式(12)所示:
实验结果如图2~7所示。
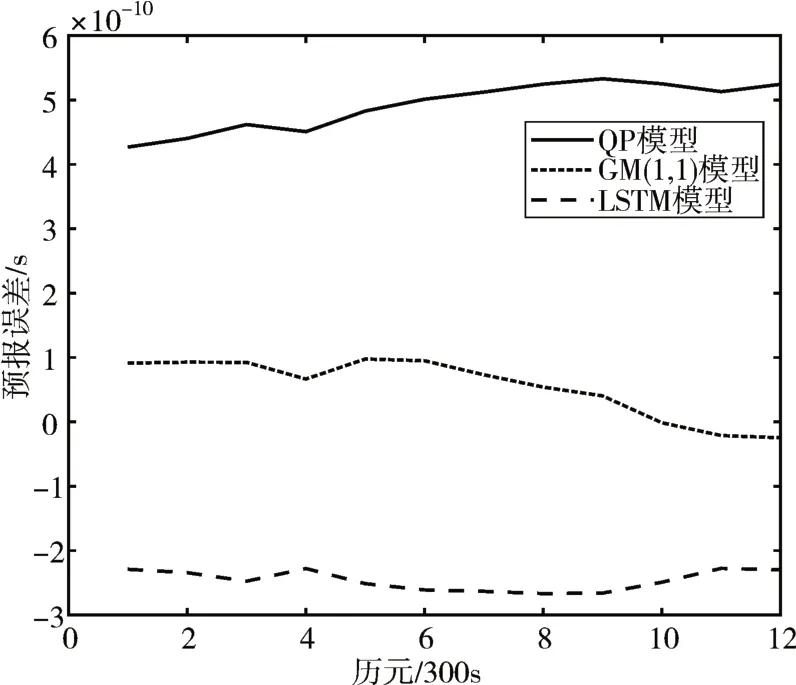
图2 PRN1用12h数据建模预报1h的预报误差

图3 PRN1用12h数据建模预报3h的预报误差

图4 PRN2用12h数据建模预报1h的预报误差
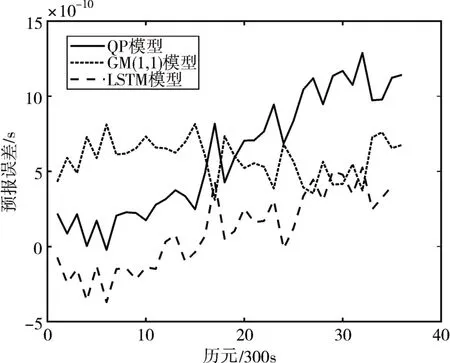
图5 PRN2用12h数据建模预报3h的预报误差
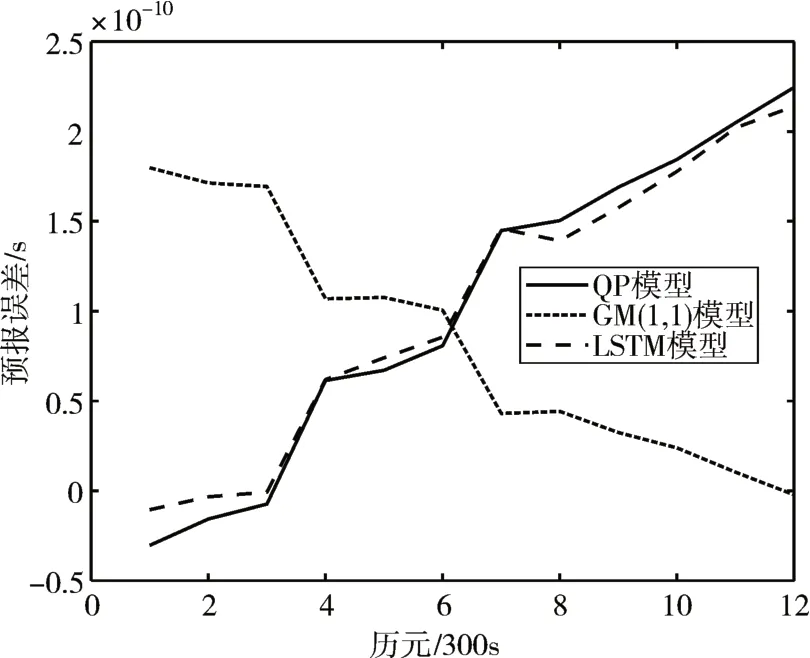
图6 PRN4用12h数据建模预报1h的预报误差
结合图2~图7和表2可知:

表2 RMS的精密卫星钟差预报结果(单位:ns)

图7 PRN4用12h数据建模预报3h的预报误差
利用少量数据(12h 时钟数据)进行模拟,对未来1h~3h 的卫星钟差进行预报时,二次多项式模型预报偏差的平均均方差分别为0.27ns 和0.53ns;灰色模型预报偏差的平均均方差分别为0.33ns 和0.29ns;长短时间记忆网络模型预报偏差的平均均方差分别为0.12ns和0.13ns。
建模数据量较少时,GM(1,1)模型和LSTM 模型的预报性能均好于QP 模型,在建模数据量小时GM(1,1)模型具有一定的优势,在建模的数据量增加时LSTM模型的优势会逐渐显现出来。
5 结语
关于GPS 卫星钟差的超快预测产品的精度不能达到一定要求的问题,本文给出了基于LSTM 模型的钟差预报方法,在建模数量较多时更能展示出优势。与QP模型和GM(1,1)模型相比,LSTM模型大大提高了钟差的预报性能,进一步提高卫星钟差的预报精度,进而增强了导航与定位的准确度。
在未来利用更长数据进行建模,进一步验证LSTM 模型的预报优势,可以进一步提高钟差预报的性能。
猜你喜欢
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
电子制作(2019年19期)2019-11-23
电子制作(2018年17期)2018-09-28
导航定位学报(2018年3期)2018-09-03
通信电源技术(2018年5期)2018-08-23
载人航天(2016年4期)2016-12-01
水利科技与经济(2016年9期)2016-04-22
重型机械(2016年1期)2016-03-01
大连工业大学学报(2015年4期)2015-12-11
海军航空大学学报(2015年4期)2015-02-27