编队协同作战中任务抢占冲突的检测与避免*
2023-12-11 12:10田宇光王洪胜
舰船电子工程 2023年9期
田宇光 王洪胜 马 良
(海军大连舰艇学院舰船指挥系 大连 116018)
1 引言
舰艇编队在作战训练过程中,常常会出现各种冲突问题。这些冲突问题轻则影响舰艇编队作战效能的发挥,重则可能产生误击误伤,甚至更加严重的后果。正如英阿马岛海战中的谢菲尔德号,就是因为雷达系统和卫星通信同时使用存在冲突,为了保证通话质量而关闭了雷达,最终没有及时发现来袭的飞鱼导弹而被击沉。编队协同作战中冲突问题复杂多样。其中有一类这样的冲突问题,即作战平台在执行两个或两个以上任务时,这些任务行动在时间上有重叠或者时间上不重叠但是空间上不能及时到达指定位置,我们将此类冲突称为任务抢占冲突。文章针对任务抢占冲突问题,建立检测模型,提出相应算法和冲突避免方法,从而为舰艇编队协同作战训练解决此类冲突问题提供参考,最终实现舰艇编队作战效能的聚优释放。
2 编队协同作战任务抢占冲突问题描述
编队协同作战就是以作战任务(Mission task)为中心,把广域分布、动态部署的作战系统实时联动、集成,产生高效的整体作战能力。编队协同作战需要完成一系列的任务,这些任务是由编队中作战单元来完成[1]。这些作战单元包括各兵力兵器以及用于作战的各种软件和人,它们是任务执行的主体。我们把这些能够完成作战任务的主体称为实体。实体通常是指具有军事意义的对象,如人、组织、装备、环境和信息。实体的行动是实体为了完成任务而进行的有组织的活动,例如舰艇机动、火力打击等。实体通过一系列有组织的行动实现各种任务。资源是实体为完成作战任务而进行行动的必须的保障。这里的资源是广义上的资源,是行动执行以及最终实现任务所需的时间、空间、装备、人员等。约束是指约束关系,是完成任务的必须满足的条件和相关制约[2]。
协同作战中各作战单元需要通过时间上的协调一致、行动上的紧密配合,从而完成总体作战任务。但是由于不同作战单元所执行的多个行动序列间通常具有并发性、作战行动过程中资源的有限性以及任务实体自身状态的局限性,使得作战过程需要满足多种约束。正是由于资源的有限性,使作战行动因“争夺”有限的资源,不能够满足约束才产生冲突。例如,某一作战单元在执行A 行动时,不能同时执行B 行动,如果赋予此作战单元同时执行A、B两个任务时,则产生冲突。我们将这种冲突称为任务抢占冲突。针对任务抢占冲突,构建编队协同作战任务抢占冲突问题用四元组进行描述:
SEQ=(SE,TA,TR,TC)
其中:
1)SEQ(single-entity state),表示单实体任务抢占问题;
2)SE(single entity),任务实体,表示执行多个作战任务的某一单个实体。
3)TA(task activity),任务行动,表示实体任务行动集合,TA={TA1'TA2'…'TAn} ;
4)TR(task resourse),任务资源,表示资源集合,这里指时间和空间;
5)TC(task constraint),任务约束,表示约束关系,这里仅有时间约束。
因此运用实体、行动、资源和约束这四个元素就能够准确地反映出冲突的本质。实体、行动、资源、约束的关系如图1所示。

图1 实体、行动、资源、约束的关系
因此将冲突问题简化为时间和空间两大资源的约束问题[3~4]。即,某一作战平台(单实体)需要执行两项任务,这两项任务之间是否存在冲突,首先要判定两项任务在时间上有没有重叠,还要判定作战平台执行完前序任务后,能否在下一任务预定的开始时刻前转移(机动)到预定位置(阵位)并完成执行后续任务的相关准备。由此可见,编队协同作战中的任务抢占冲突的检测就是对实体空间在时间上的状态转移进行检测,如果实体空间状态转移满足时间约束关系[5],说明两个任务之间不存在冲突;如果不满足,则说明存在任务抢占冲突。通过对作战任务时间进行合理调整安排,从而避免任务抢占冲突的发生[6]。
3 任务抢占冲突检测模型及算法
为了说明问题方便,以编队协同作战中的一个作战单元(单实体)为对象,研究任务抢占冲突问题。
3.1 单实体任务抢占冲突时间约束模型


图2 时间的约束关系
可见,当两个任务行动时间约束关系是finishes、during、overlap、equal、starts 时,即可判定冲突存在;当两个任务行动的时间约束关系是before 和meets 时,需进一步计算空间约束关系判断冲突是否存在。
3.2 单实体任务抢占冲突空间约束模型
假设单实体的两个邻接任务行动为i、j,则两个任务行动计划时间间隔T|j-i|。这个时间在制定完作战计划时已经确定。在实际作战过程中,空间转移时间按下式进行计算。
式中:
1)(xi'yi)、(xj'yi)分别表示实体进行状态转移的两个任务行动点地理位置;
2)Rf为实体作战系统的有效作战半径;
3)Ve表示实体的机动能力。
由此可得到单实体空间约束判断规则如下:
规则一:如果T|j-i|≥Tij,则计划时间内实体来得及进行状态转移(空间转换),冲突不存在。
规则二:如果T|j-i|<Tij,则计划时间内实体来不及进行状态转移(空间转换),冲突存在。
3.3 单实体任务抢占冲突检测算法
假设单实体任务抢占冲突检测域为SeD,显然SeD=TA。单实体任务抢占冲突检测算法设计如下。


4 基于规则的任务抢占冲突避免
为了避免产生单实体任务抢占冲突,在制定协同计划时,必须进行任务计划时间的一致性调整[10]。任务计划时间一致性调整就是使单实体任务行动串行时间约束不单要满足串行约束时间网络的加法运算,还要同时考虑状态转移时间[11]。
4.1 任务时间一致性调整方法
1)问题描述
对于执行任务的单实体,从行动节点i出发到节点j需要通过串行路径P:i→j可以表示为i=i0→i1→…→im=j(其中:i=i0,im=j,{}i1'i2'…'im-1
为中间时间节点)。如果判断在行动节点ik和ik+1(k=0'1'…'m-1)之间存在状态转移冲突,说明该串行路径存在时间约束不一致性问题,需要通过调整路径一致性来避免冲突[12]。
2)初步调整步骤
(1)按照时间窗标准,将ik和ik+1之间的时间约束关系调整为before或者meets关系;
(2)判断是否满足状态转移时间限制,如果满足就停止调整,如果不满足则转到第三步;
(3)将时间约束关系调整为before,并且ik和ik+1之间的时间差最少为实体状态转移时间Tst。
调整后和调整前的单实体串行时间约束网络图[7],如图3。

图3 单实体串行时间约束网络图

经过调整后必然存在v2>v1,会导致整个任务计划时间增加,有可能产生整个任务时间需求限制,从而产生新的冲突,因此需要进一步进行调整,调整需满足两个条件要求:(1)进行一致性调整,消解状态转移冲突;(2)满足整体计划时间要求。
3)调整规则
在实际操作时,可采用下列两种规则手段进行调整,调整后的时间约束网络仍然会满足一致性,而且整体任务时间不会增加。
(1)冲突去除规则:主要针对某任务行动只有一个实体具备完成该任务行动的能力,此时同一致性算法中的剔除不一致性时间区间一样,为了保证整个任务行动的可执行性,将存在冲突的节点从网络中去除。去除后的约束网络图如图3。
(2)冲突代理规则:当编队作战系统中存在与冲突实体具有相同任务执行能力的另一个实体时,把此实体称为存在冲突实体的代理实体。在冲突节点处用代理实体的行动来替代冲突实体的行动,串行时间约束网络就转化成并行时间约束网络,当然在冲突代理行为中,要注意避免两个实体的互冲突情况。冲突代理后的约束网络图如图4。

图4 时间约束冲突调整规则图
4.2 调整算法
单实体任务行动集合TA={TA1'TA2'…'TAn},算法设计如下[13]。
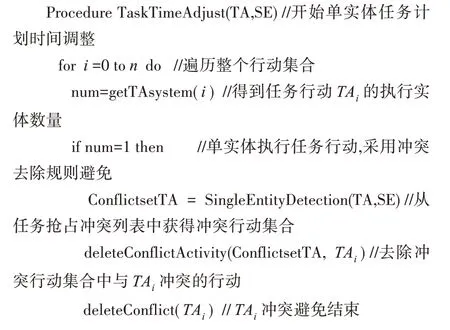

5 结语
针对单个作战平台多任务行动的冲突问题,通过判断任务时间、空间的约束满足确定任务行动之间是否存在冲突,通过基于任务去除和任务代理思想,对任务时间进行一致性调整达到避免冲突的目的。为了说明问题方便,本文只针对单实体任务抢占冲突进行了研究,在任务资源和约束方面只考虑了时间和空间两种资源及约束关系。实际作战过程中可能涉及多个作战平台和其他约束满足情况,在后续的论文中进一步深入分析探讨。
猜你喜欢
军事文摘(2023年5期)2023-03-27
加油站服务指南(2021年4期)2021-07-21
小哥白尼(军事科学)(2021年1期)2021-07-16
小哥白尼(军事科学)(2020年12期)2021-01-18
数学年刊A辑(中文版)(2020年1期)2020-05-19
北京航空航天大学学报(2017年3期)2017-11-23
军事运筹与系统工程(2016年4期)2016-07-10
人生十六七(2015年6期)2015-02-28
海军航空大学学报(2015年4期)2015-02-27
导航定位与授时(2014年2期)2014-04-27