一种水下目标定位方法*
2023-12-11 12:11李自超魏钰博秦同杰
舰船电子工程 2023年9期
李自超 林 劲 魏钰博 秦同杰
(大连测控技术研究所 大连 116013)
1 引言
由于海洋中流的冲击影响以及水声工程作业本身的复杂性,水下目标在海面以下的位置存在一定的“随波逐流性”,致使对布放在海底、尤其是具有较大深度的水下目标进行快速、精确定位变成难题。传统的定位方法[1~2]有其局限性:长基线定位[3]精度虽然高,但定位基阵的布放耗时耗力,无法实现快速部署;短基线定位[4]对船只和测距系统的要求比较苛刻,系统需要做大量校准工作。本文采用水声测距与差分GPS 联合的方式实现定位[5],详细阐述了其实现原理,开展了试验验证,试验证明该方法有效可行,可为水下目标定位的工程实现提供参考。
2 水声测距系统
水声测距系统[6]是以声波作为信号、以水作为传播介质,通过计算声波时延[7]来进行测距的系统。目前比较成熟的测距系统主要由同步时钟模块、测距信号发射接收模块、数据采集模块、数据解算模块等核心部件组成,系统组成框图如图1所示。
图1所示的水声测距系统是以主动测距的方式实现,其实现过程为:在同步时钟[8]作用下,接收水听器接收发射换能器发射的测距信号,通过数据解算模块解算出收发时延,结合所处海域声速,获取距离信息。
3 差分GPS定位
利用传统的单点GPS定位,即可初步实现对船舶的实时定位功能。但由于存在着轨道误差、时钟误差、SA 影响、大气影响、多径效应以及其他误差[9],GPS 接收机解算出的坐标与实际坐标的定位精度达到米级以上,定位精度差。载波相位差分(RTK)GPS[10]是由基准站发送改正数,由移动站接收并对其测量结果进行改正,以获得精确的定位结果,其定位精度可达厘米级[11]。差分GPS定位系统工作流程如图2所示。
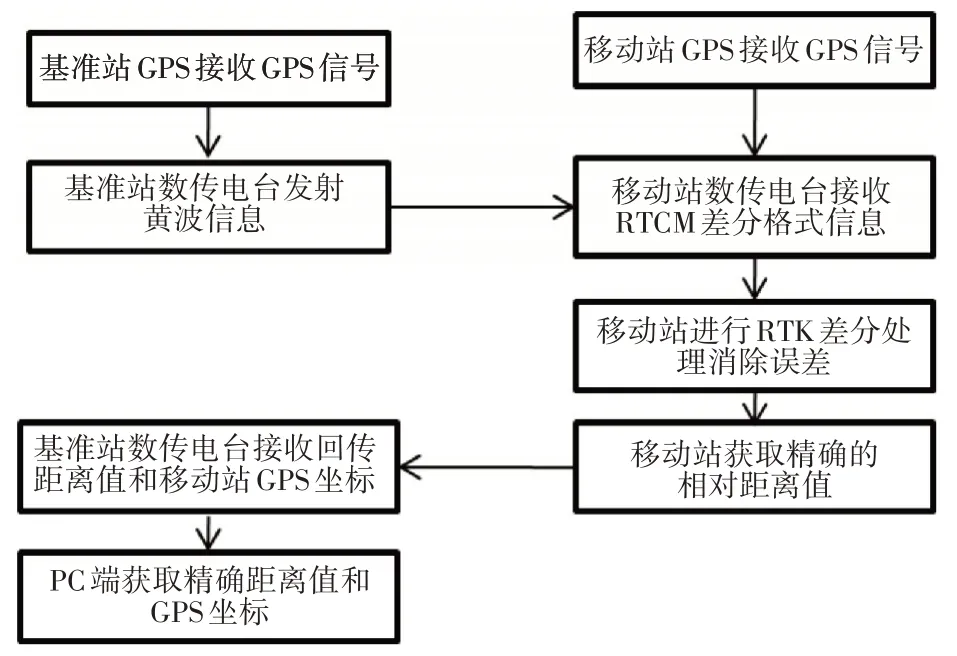
图2 差分GPS定位系统工作流程图
4 联合测距
差分GPS 与水声测距联合的总体思路是利用声信号的水下传播特性解算出水下发射器与接收器之间的时延,并结合所处海域的声速将其转化为相对距离;利用差分GPS解算出相应测点的位置信息。将水声测距与差分GPS定位相结合,通过几何关系解算出被定位目标的位置信息。设计方案如图3所示。
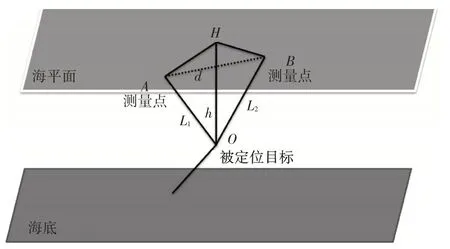
图3 设计方案图
在被定位目标上安装深度传感器和发射换能器,深度传感器用来获取被测目标的深度,发射换能器发射测距信号;在测量船上安装差分GPS和接收水听器,差分GPS用来获取相应测点的绝对位置信息,接收水听器用来接收水声测距信号,测量船以被测目标为中心绕圈测量。具体实现过程如下。
1)深度传感器测量被定位目标的深度为h1,水听器入水深度为h2,被定位目标与水听器间的垂直距离h=h1-h2,点H 为被定位目标O 在海平面的投影点;
2)被定位目标上安装的发射换能器发射测距信号,在时钟同步的条件下,测量船上的接收水听器接收测距信号并解算出发射与接收之间的时延,结合所处海域声速得到被定位目标与测量船之间的距离L1、L2;
3)计算Rt△AHO 和Rt△BHO,得到海面上AH、BH的长度;
4)差分GPS放置于测量船,以获取相应测点的经纬度信息和测点间距离d;
5)在测点中任取两点作为测量点A 和测量点B,利用高斯-克吕格平面直角坐标公式[12~13]将测量点A 和测量点B 的经纬度坐标转换为平面直角坐标(xA,yA)(xB,yB),高斯-克吕格平面直角坐标公式如下:
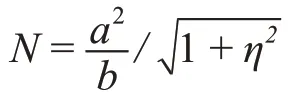
η=e′cosB,其中e′为地球的第二偏心率;
t=tanB;
6)在△ABH 中,H 点坐标(xH,yH)的计算公式如下:
7)在6)的基础上用高斯-克吕格反变换公式[12~13]解算出H 点的经纬度,也即被定位目标的经纬度。
5 试验验证
依托某项目在大连海域进行了海上试验验证,试验海域海水深度40m 左右,海况2 级,被定位目标与测量船的距离在300m~800m 之间。图4 为系统的主要硬件组成。
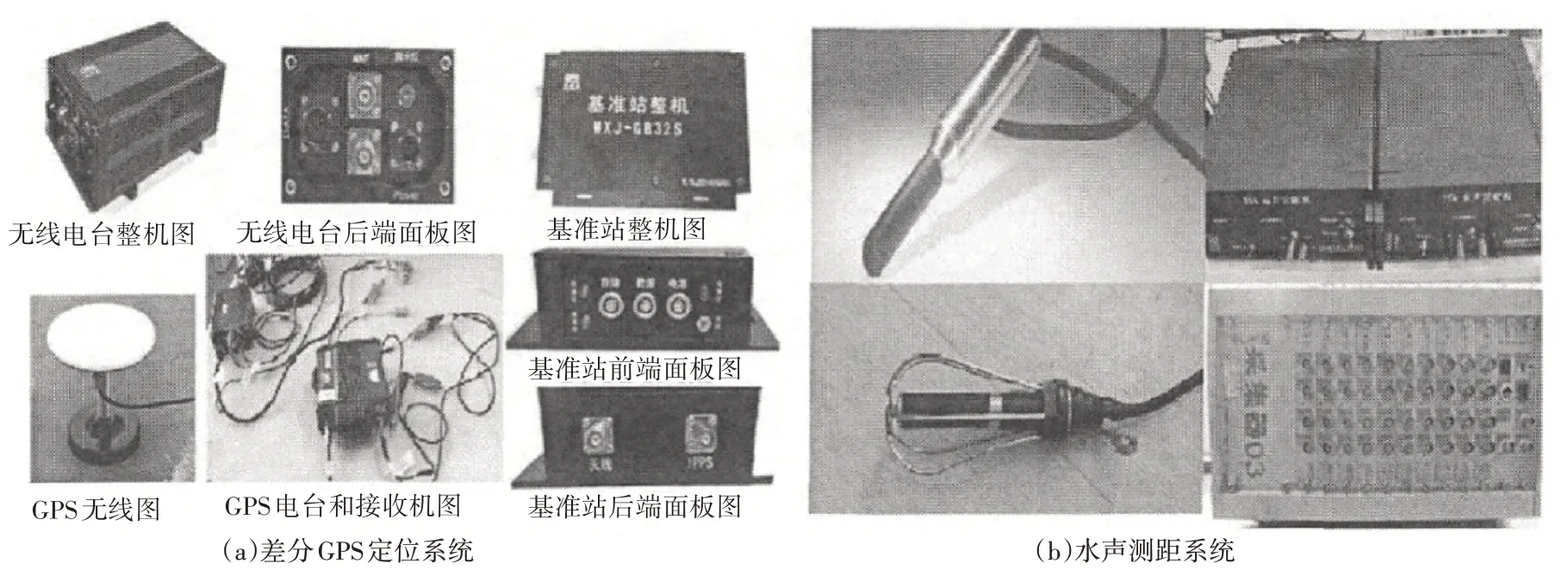
图4 差分GPS定位系统及水声测距系统
试验前用差分GPS 记录被定位目标的布放位置。试验过程中,当差分GPS输出的测点坐标保持稳定时开始记录。利用式(2)~(3)解算出H点的位置坐标,标记为H(ii=1,2…N),将被定位目标的布放位置与Hi 的间距大于5m 的点作为野点剔除。从HM 开始对解算值进行处理,计算从H1 到HM 中任意两个点之间的距离并进行求和,将到各个点距离之和最短的点记为HM,HM 作为先验条件。从HM+1 开始,数据解算模块输出到n 个解算值距离之和最小的点的位置坐标。随着采样点增多,位置不断进行更新,直到|∆H |在某个范围内保持稳定,此时数据解算模块输出的位置记为HN,若HM 与HN 的距离小于0.5m,则以HN 作为解算模块输出的被定位目标位置;若HM 与HN 的距离大于0.5m,将H1 到HN 中到各个点距离之和最短的点作为先验条件,重复上述过程。
本次试验取前10 个有效解算值来确定HM 的位置,当连续五个点满足|∆H|≤0.2m,即认为HN的位置保持稳定。图5 为|∆H|变化趋势,从第23个点到第27 个点,|∆H|均小于0.2m。从图6 可以看出,HM、HN 与解算值分布在以布放位置为中心,半径为1.7m的圆内,计算得HM与HN的距离为0.42m,此时HN即为被定为目标的最终位置。若以被定位目标的布放位置为真值,则认为此次试验的定位精度为1.7m。
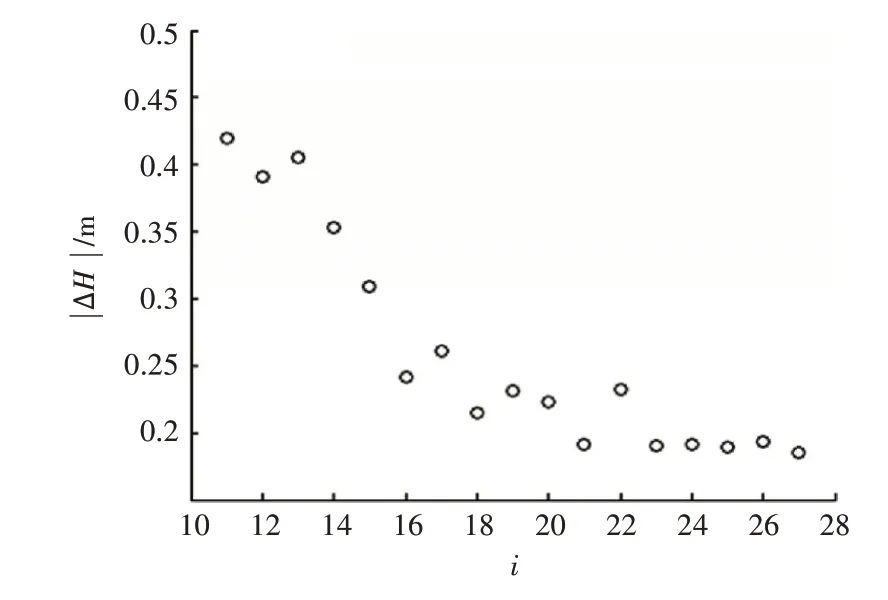
图5 |∆H |变化趋势
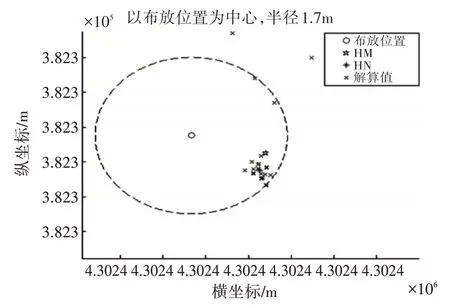
图6 布放位置、HM、HN与解算值的位置关系
6 结语
本文针对经典的长基线定位基阵布放复杂这一特点,根据长基线定位原理,利用单水听器和差分GPS进行组合定位,实现了对水下目标的快速便捷定位,同时对试验测试过程数据进行了误差修正,提高了定位精度。
猜你喜欢
电声技术(2022年3期)2022-04-28
应用科技(2020年1期)2020-06-18
科学(2020年3期)2020-01-06
电子制作(2017年7期)2017-06-05
电子制作(2017年22期)2017-02-02
电子制作(2017年19期)2017-02-02
系统工程与电子技术(2016年7期)2016-08-21
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
太空探索(2014年1期)2014-07-10
声学技术(2014年1期)2014-06-21