
提高车辆转向稳定性的车身主动侧倾控制研究
2023-12-16 04:33刘晓文徐晓美台永鹏
南京信息工程大学学报 2023年6期
刘晓文 徐晓美 台永鹏
稳定性控制;主动侧倾控制;主动悬架;PID控制;MATLAB/Simulink
0 引言
车辆高速转向时,由于车身向弯道外侧倾斜,不仅降低了驾乘人员的乘坐舒适性,而且还会导致侧翻事故,威胁驾乘人员的生命安全.为了改善这种状况,多种提高车辆转向稳定性的方法被提出[1-2],包括:改变悬架刚度或阻尼系数[3-4];在横向稳定杆上加入控制器,对横向稳定杆实施主动或半主动控制[5];通过主动或半主动悬架对车身侧倾角和因侧倾引起的侧向力矩进行调节,即所谓的车身主动侧倾控制.车身主动侧倾是指在车辆转向行驶时,通过主动使车身向弯道内侧倾斜一定角度,以平衡车辆高速转向时因离心力作用而使车身向弯道外侧侧倾的侧倾力矩,从而达到提高车辆弯道行驶的平顺性和稳定性的目的[6-8].
车身主动侧倾的研究经历了从提出控制方法到方法验证,再到机构设计与方案实现等过程.Piyabongkarn等[9]提出主动侧倾的两种控制方法,即RHC(Recede Horizon Control)和DTC(Direct Tilt Control),前者通过道路曲率的预瞄使车身的侧倾与驾驶员的转向操作产生同步,后者则采用侧倾机构直接将车辆侧倾至最佳角度.Phanomchoeng等[10]建立了车辆的六自由度横向动力学模型,针对DTC方案能耗大、转向侧倾不同步等问题开展了优化研究.在此基础上,Jeon等[11]提出一种配备主动或半主动悬架的车辆侧倾模型,通过整车试验研究,验证了此主动侧倾车辆模型的估计精度.刘平义等[12]提出一种主动侧倾角计算方法,得到用于平衡车辆稳态转向侧向力矩的车辆主动侧倾角,并通过一种窄型车辆的转向试验研究验证了所提出的主动侧倾角计算方法的可靠性.凌俊威[13]提出一种慢主动悬架实现车身主动逆向侧倾控制,在不恶化平顺性的条件下,改善了车辆的操纵性和安全性.张曦月[14]提出一种结合车辆行驶状态和道路信息的稳定边界辨识方法,基于动态约束的车辆侧向稳定性控制方法使车辆向内侧倾,并通过硬件在环试验,验证了所提控制策略能有效保证车辆在极限工况下行驶的稳定性.
上述研究主要侧重于车辆侧倾模型以及主动侧倾控制算法的研究,并没有考虑路面状况和转向工况对主动侧倾效果的影响.本文以某两轴车辆为研究对象,主要探讨在不同路面激励和不同转向工况下主动侧倾车辆的车身侧倾角、乘员感知加速度和横向载荷转移率,并评价车身主动侧倾引起的悬架动挠度和悬架功耗,以期为车身主动侧倾控制提供理论参考.
1 车辆动力学模型
基于相关动力学理论和车辆受力与运动情况,建立包括车辆横摆与侧倾运动在内的六自由度车辆动力学模型.
1.1 两自由度转向模型
图1为简化的两自由度线性转向模型.在此平面模型中,作如下假设:不考虑地面切向力对轮胎侧偏特性的影响;不考虑轮胎回正力矩以及轮胎侧偏特性的变化;不考虑空气阻力;不考虑转向系统的影响,车辆的转向输入为前轮转角;x轴方向的车辆行驶速度v不变.在此情况下,车辆只有沿y轴方向的侧向运动和绕z轴的横摆运动.

图1 车辆侧向和横摆运动模型Fig.1 Vehicle model of lateral and yaw motions
图1中:a,b分别为质心到前、后轴的距离;Ff,Fr分别为前、后轮受到的侧向力;δ为前轮转角;ψ为横摆角位移.所建车辆动力学方程如式(1)和(2)所示:

(1)

(2)
其中,
式中:m为整车质量;ms为簧上质量;h为质心至侧倾中心的垂向距离;θ为车身侧倾角;Iz为横摆转动惯量;cf,cr分别为前、后轮的侧偏刚度.
1.2 四自由度侧倾模型
由于离心力作用,车辆在转向时会向弯道外侧倾斜,前、后轴左右两侧车轮的垂直载荷也会发生变化.因此,为更准确地分析车辆的转向运动,需要考虑车厢侧倾运动以及悬架和车轮受到的地面激励对车辆转向运动的影响.图2为考虑车身侧倾和垂向运动的四自由度车辆简化模型.
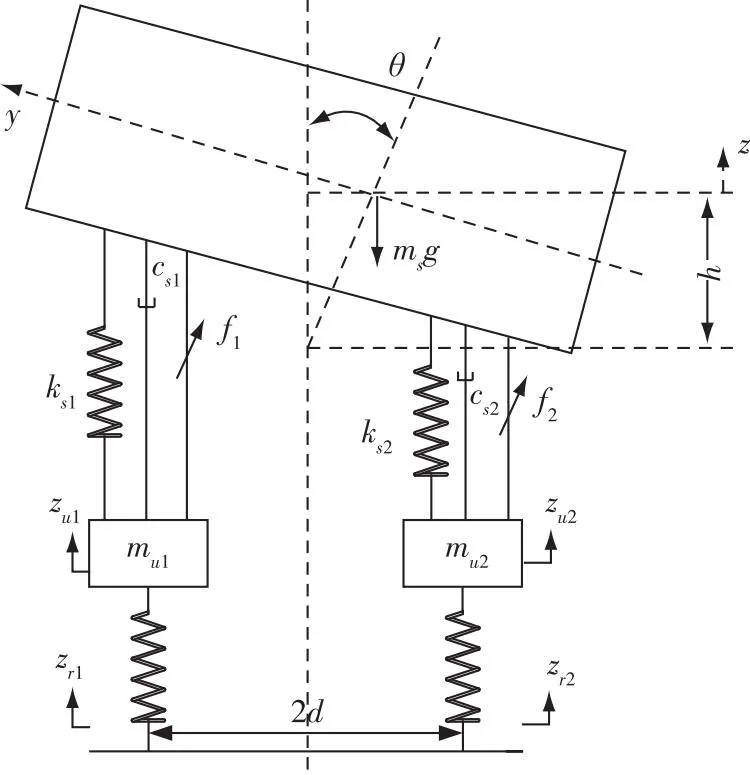
图2 车辆垂向和侧倾运动模型Fig.2 Vehicle model of vertical and roll motions
图中:ks1,ks2分别为左、右悬架弹簧刚度;cs1,cs2分别为左、右悬架阻尼系数;f1,f2分别为左、右悬架可控阻尼力;mu1,mu2分别为左、右悬架簧下质量;zu1,zu2分别为左、右悬架簧下垂向位移;zr1,zr2分别为左、右车轮受到的地面垂直激励;z为簧上质量的垂向位移.
车辆侧倾运动动力学方程如式(3)所示:

(3)
簧载质量垂向动力学方程如式(4)所示:

(4)
非簧载质量垂向动力学方程如式(5)所示:

(5)
其中,
式中:Ix为簧上质量绕x轴的侧倾转动惯量;d为车辆轮距长度的一半;Mt为主动悬架控制力矩;kt1,kt2分别为左、右车轮垂向刚度.
2 主动侧倾控制器设计
2.1 期望侧倾角
主动侧倾即希望车辆在转弯时车身主动向弯道内侧倾斜,使车辆受重力产生的力矩与受离心力产生的力矩相抵消,从而保证车辆转弯行驶的稳定性,使乘员感知侧向加速度接近于零.
由重力产生的力矩如式(6)所示:
MG=msghsinθ.
(6)
由离心力产生的力矩如式(7)所示:
(7)
当MG=Mf且车辆稳态行驶时,y轴上的加速度为零,此时为车辆转弯时的理想状态,由此可得车辆主动侧倾期望侧倾角[15]:

(8)
作为评价主动侧倾控制效果的重要评价指标,乘员感知侧向加速度由3部分组成,即重力加速度、车身侧倾加速度和侧向加速度[16],如式(9)所示:

(9)
横向载荷转移率LTR(Lateral Load Transfer Ratio)常用来评价车辆转向时的抗侧翻能力[17],其表达如式(10)所示:

(10)
2.2 控制器设计
基于PID设计车辆的主动侧倾控制器,其主要控制思想为:在车辆进行转向时,由陀螺仪检测车身侧倾角,并将其与期望侧倾角比较,得到误差并反馈给PID控制器;控制器接收到误差信息后计算达到期望侧倾角所需要的主动侧倾控制力矩;控制力矩通过悬架作用传递给车身,车辆簧上和簧下部分分别受到悬架力矩的作用,使车辆达到转向离心力产生的力矩与侧倾力矩相等的理想状态,从而提高车辆转弯时的侧倾稳定性.
控制器的性能通常由系统的响应时间、稳态误差以及峰值响应等指标进行评价.PID控制器的参数调节包括调节比例系数Kp、积分系数Ki和微分系数Kd.在调参过程中,往往是先确定Kp系数,以加快系统的响应时间,最快程度上消除系统误差;接着引用Ki参数消除稳态误差以使得被控对象的数值达到给定值并减小系统的振荡;最后加入适量大小的Kd参数,减小系统的超调和振荡,改善系统的稳定性.图3为主动侧倾控制系统框图.设定车辆动力学系统输入为车速v和前轮转角δ,输出为实际侧倾角θ;两自由度转向模型输出的横摆角速度和y轴上的位移作为四自由度侧倾模型的输入;由四自由度侧倾模型算出实际侧倾角θ,实际侧倾角θ与期望侧倾角θdes的差值反馈给PID控制器;控制器输出控制力矩Mt到四自由度侧倾模型,控制力矩Mt的计算式如式(11)所示.
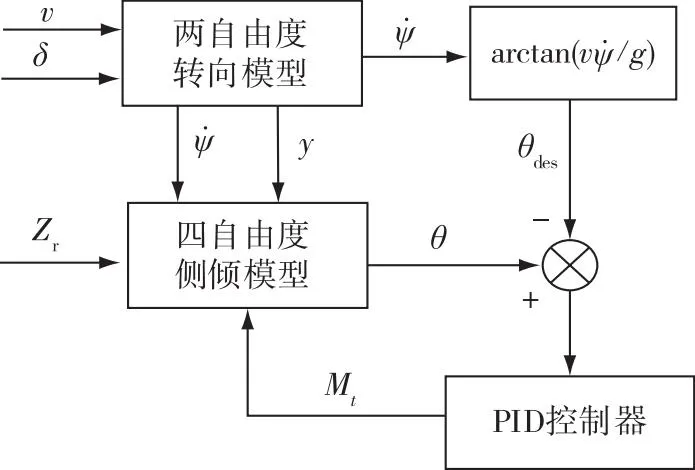
图3 主动侧倾控制系统框图Fig.3 Block diagram of active roll control system

(11)
式中,e(t)为实际侧倾角与期望侧倾角的差值.
3 仿真结果及分析
为验证所提出的控制策略与设计的控制器的有效性,在MATLAB/Simulink环境下,以地面激励模拟车辆行驶中的地面干扰,对车辆的转向侧倾稳定性进行仿真研究.
3.1 正弦路面激励下恒定车速变转角工况
本节研究正弦路面激励下恒定车速和变前轮转角输入工况下车辆的转向稳定性问题.假设车辆以10 m/s的车速在幅值为0.04 m、频率为0.056 m-1的正弦路面激励下行驶,前轮转角从π/30逐渐增加至π/15.图4a和4b分别为在此工况下,无侧倾控制和有侧倾控制车辆侧倾角的变化,图4b还给出了期望侧倾角.可见,无侧倾控制时车辆的侧倾角在车辆行驶过程中有较大幅度的波动,且侧倾角的稳定值远大于有侧倾控制时的侧倾角.在主动侧倾控制下,车身侧倾角很小,并且能在短时间内进入稳定状态,始终围绕期望侧倾角作小幅波动.

图4 汽车车身侧倾角Fig.4 Roll angles of vehicle body
前已述及,乘员感知侧向加速度表示乘员在车辆转向时的感知能力,也是反映车辆行驶侧向稳定性的一个重要指标.乘员感知侧向加速度越接近于零,车辆的转向行驶侧向稳定性就越好.图5为乘员感知侧向加速度响应曲线.由图5可以看出,无侧倾控制车辆的乘员感知侧向加速度在转向开始时达到较大值,然后起伏变化,但无法在短时间内稳定到零值;对于有侧倾控制的车辆,乘员感知侧向加速度在小幅波动后,车身姿态得到迅速调节,0.45 s后主动侧倾控制力矩与离心力产生的力矩几乎相互抵消,使得乘客感知侧向加速度接近于零.

图5 乘员感知侧向加速度Fig.5 Lateral acceleration perceived by occupants
横向载荷转移率也是评价车辆转向性能的重要指标,其大小越接近于0,车辆的转向稳定性越好,抗侧翻能力越强.图6为无侧倾控制和侧倾控制下车辆横向载荷转移率LTR的变化情况.由图6可见,两条LTR曲线在经过初始的波动后,无侧倾控制车辆的LTR值始终在大幅度波动,而主动侧倾控制车辆的LTR值在短时间内迅速减小,0.5 s后趋于稳定并维持在零值附近不变,即主动侧倾控制显著降低了车辆的横向载荷转移,大大减小了车辆的侧翻风险.

图6 横向载荷转移率Fig.6 Lateral load transfer ratio
悬架动挠度是汽车行驶平顺性的重要评价指标.图7所示为有侧倾控制和无侧倾控制下左、右后悬架动挠度的响应曲线.由图7可以看出,当车辆以变化的前轮转角转向行驶时,相比于无侧倾控制车辆,有侧倾控制车辆后悬架的动挠度峰值也得到了有效控制.这说明在转向工况下,主动侧倾控制可以明显改善车辆的行驶平顺性.
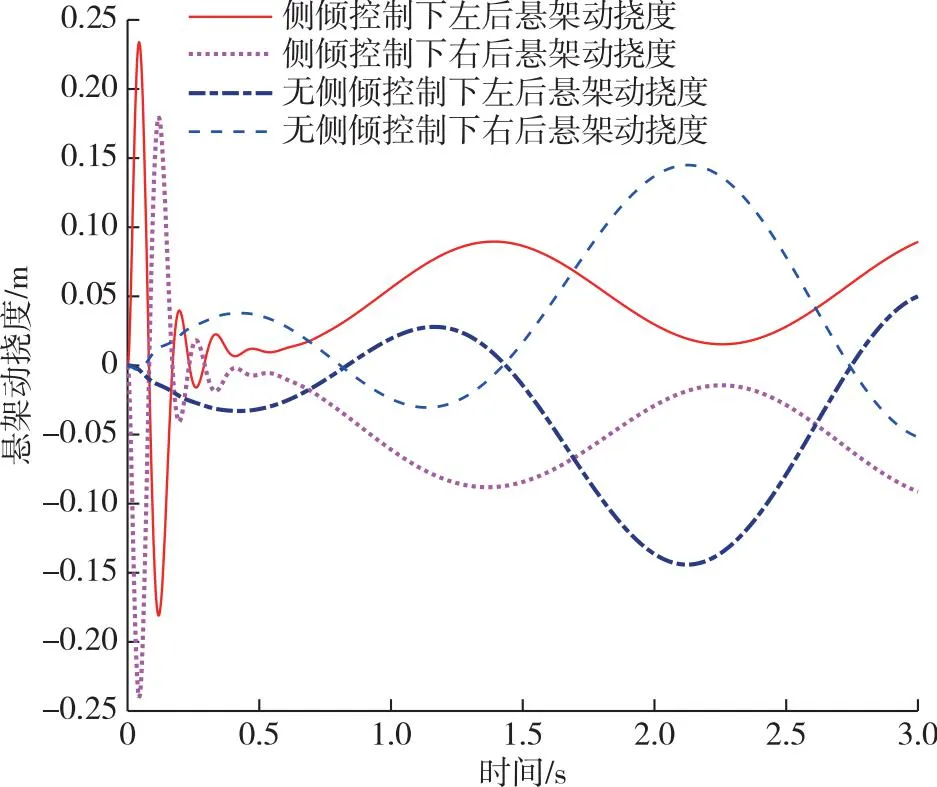
图7 左、右后悬架动挠度Fig.7 Dynamic deflection of left and right rear suspensions
3.2 复合路面激励下变车速变转角工况
本节研究复合路面激励下变车速和变前轮转角输入工况下车辆的转向稳定性问题.复合路面由C级路面和前述正弦路面叠加而成.假设车辆以幅值为π/30的正弦转角在复合路面上行驶,且行驶速度在6 s内从10 m/s加速到13 m/s.图8a和8b分别为在此工况下,无侧倾控制和有侧倾控制车辆侧倾角的变化,图8b也给出了期望侧倾角.由图8可见:在车辆前轮转角和速度都发生变化时,无侧倾控制车辆的车身侧倾角与期望值相差较大且一直处于振荡中,这说明无侧倾控制车辆在复合路面激励下变道变速行驶时车辆的行驶稳定性较差;而在侧倾控制下,实际车身侧倾角能很好地逼近期望值,并在零值附近小幅波动,这说明即便是在复杂行驶工况下,主动侧倾控制车辆依然具有良好的行驶稳定性.

图8 汽车车身侧倾角Fig.8 Roll angles of vehicle body
图9和图10分别为有、无主动侧倾控制下的乘员感知侧向加速度与车身横向载荷转移率.可以看出:当车辆行驶在复合路面上时,这两项指标都会因为地面干扰发生振荡变化,都在一定范围内波动,但无侧倾控制车辆的乘员感知侧向加速度和横向载荷转移率的波动范围更大,且所围绕波动的稳定值也较大;主动侧倾控制下的乘员感知侧向加速度和横向载荷转移率基本在零值上下波动.图11为复合路面激励下有侧倾控制和无侧倾控制时左后悬架动挠度响应曲线.由图11可以看出:车辆在复合路面激励下变速转向行驶时,无侧倾控制车辆的左后悬架动挠度一直在较大幅度范围内波动;而有侧倾控制车辆的左后悬架动挠度的幅值明显低于无侧倾控制车辆,且在4 s后,基本维持在一个小范围内波动.显然,主动侧倾车辆在复合路面激励下变速转向行驶时的悬架动挠度更小.

图9 乘员感知侧向加速度Fig.9 Lateral acceleration perceived by occupants

图10 横向载荷转移率Fig.10 Lateral load transfer ratio
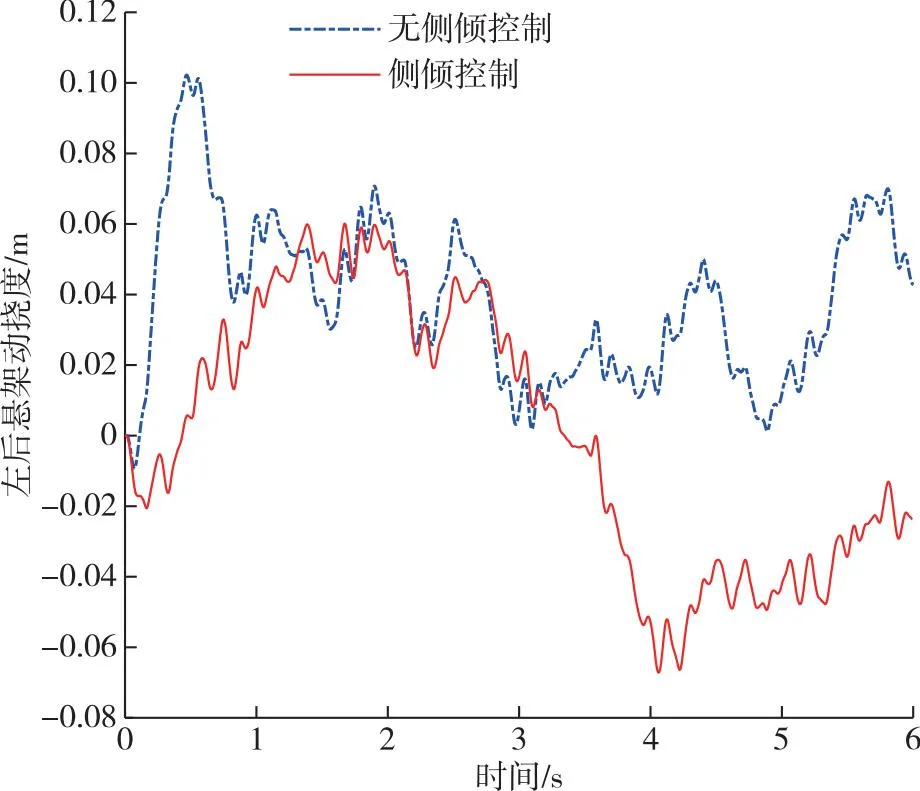
图11 左后悬架动挠度Fig.11 Dynamic deflection of left rear suspension
3.3 主动悬架功耗
评价主动侧倾车辆的经济性需要对主动悬架的功耗进行计算.假设车辆以固定速度和固定前轮转角在路面上转向行驶,忽略路面垂直激励的影响,对主动侧倾控制系统进行仿真,考察主动侧倾车辆悬架的功耗.图12为计算得到的主动悬架输出的控制力矩变化曲线.由图12可知,每一侧悬架控制力矩约为1 700 N·m.由于悬架控制力矩是随时间变化的,所以可用积分法求主动悬架的功耗,如式(12)所示:

图12 主动悬架控制力矩Fig.12 Active suspension control torque

(12)
式中:z1,z2分别表示簧上、簧下质量的位移量;f表示悬架控制力.
图13为左侧悬架的功耗,右侧悬架功耗与左侧悬架相当.由图13可知,左侧悬架的功耗在0.1 s内迅速增大,经过小幅波动后达到稳定值,大小约为300 kJ.显然,对于主动控制而言,此值是比较理想可行的,这表明主动侧倾在满足车辆稳定行驶的同时,能保证车辆良好的经济性能.如果需要减少功耗则需要减小悬架单位位移下的控制力大小,即在评价指标允许的合理范围内改变期望侧倾角,以使悬架单位位移下的控制力减小.

图13 左侧悬架功耗Fig.13 Power consumption of left suspension
4 结语
基于某两轴车辆开展了车身主动侧倾控制研究,比较分析了有/无侧倾控制下车身侧倾角、乘员感知侧向加速度、横向载荷转移率、悬架动挠度的变化情况,并对主动侧倾控制下悬架功耗进行了计算,主要研究结论如下:
1)在正弦路面激励、恒定车速、变前轮转角输入工况下,主动侧倾控制的车身侧倾角很小并且能在短时间内进入稳定状态,乘员感知侧向加速度和横向载荷转移率在小幅波动后都能迅速接近于零,悬架的动挠度峰值也能得到有效控制.
2)在复合路面激励、变车速、变前轮转角输入工况下,主动侧倾控制的车身侧倾角、乘员感知侧向加速度和横向载荷转移率基本都在零值附近上下波动,悬架动挠度幅值明显低于无侧倾控制车辆.这表明,即便是在复杂行驶工况下,主动侧倾控制车辆依然具有良好的行驶稳定性和平顺性.
3)主动侧倾控制车辆的悬架功耗较小,文中所研究车辆的悬架功耗约为300 kJ,表明主动侧倾在满足车辆稳定行驶的同时,能保证车辆良好的经济性能.
猜你喜欢
北京航空航天大学学报(2021年4期)2021-11-24
光学精密工程(2016年3期)2016-11-07
北京汽车(2016年6期)2016-10-13
通信电源技术(2016年1期)2016-04-16
西北工业大学学报(2015年1期)2016-01-19
现代制造技术与装备(2015年4期)2015-12-23
吉林地质(2014年4期)2014-03-11
汽车维护与修理(2014年10期)2014-02-28
建筑设计管理(2014年11期)2014-02-28
