基于三维激光点云的靶标探测系统研究与试验
2023-12-18 09:28齐亚聪陈毅飞杨会民王学农
新疆农业科学 2023年11期
齐亚聪,陈毅飞,杨会民,王学农,
(1.新疆农业大学机电工程学院,乌鲁木齐 830052;2.农业农村部林果棉装备科学观测实验站,乌鲁木齐 830091;3.新疆农业科学院农业机械化研究所 ,乌鲁木齐 830091)
0 引 言
【研究意义】农药若得当使用可以避免45%的农产品的病虫害损失[1]。农药有效利用率还不够高[2]。变量喷雾技术根据传感器探测到作物的具体特征信息,调整喷嘴的喷雾速率,精准控制喷雾量[3]。因此,基于三维激光点云的靶标探测系统研究与试验,对提高农药利用率、实施变量喷雾有重要意义。【前人研究进展】变量喷雾的关键技术是靶标的精确探测,常见的靶标探测技术主要有红外传感器技术、超声波传感器技术、激光雷达传感器技术等,就这几种靶标探测技术展开了研究[4-5]。红外传感器技术的原理是发射器发射红外线,经靶标漫反射后由红外接线收器接收,通过接收器的接收情况来判断检测范围内是否有靶标存在,但红外线易受光照影响[6]。超声波传感器的靶标检测装置不仅可以探测到靶标的有无,能粗略检测其体积,但超声波存在回波不稳、易被干扰和测量精度低等问题[7-8]。激光雷达能够以足够的精度测量植物的几何特征,使获取作物的三维数字化图像成为可能,可以获得大量的植物信息,如高度、宽度、体积、叶面积指数和叶面积密度[9]。Gu Chenchen等[10]提出了一种基于激光探测和测距点云数据的冠层网格剖面特征分析方法,实验结果表明模拟的冠层剖面与人工测量的结果相似,测量所得的冠层体积的准确率为93%,但在冠层稀疏的边缘存在一定的差异。Medeiros等[11]采用移动平台上的滑轨带动激光雷达实现果树测量,通过多次扫描获得果树冠层点云,完成果树冠层的三维重建。管贤平等[12]搭建的基于机载激光雷达的农作物表型探测系统,该系统采用基于局部领域特征的分割方法,植株与地面的分类效果良好,与人工统计的数量相比,检测的数量平均误差为11.83%。吴志鹏等[13]搭建的基于雷达的果树轮廓测量平台,通过激光雷达采集果树的三维点云,利用ICP(Iterative Closest Point,迭代最近点算法)算法实现双侧点云的配准,欧氏聚类算法分割获取枣树点云数据,探测结果与手工测量的结果相比,相对误差在4.08%,拟合效果较好。俞龙等[14]搭建的果树冠层体积激光测量平台,通过空间转换果树激光扫描点在大地坐标系的三维数据,采用切片技术提取冠层点云的面信息,用累加的计算方式得到冠层体积。试验证明,冠层激光检测体积与人工测量的相对误差约为5%。张美娜等[15]采用电控滑轨搭建的靶标叶面积密度测量的平台,试验结果表明,基于高斯函数、多项式函数与指数函数的拟合,相对误差最小为11.05%。刘芳等[16]对三维激光点云数据的树冠体积估算的研究,对三维激光点云的数据进行匹配、拼接、去噪与压缩等处理,再提取冠层边缘特征点,最后利用TIN(Triangulated irregular network)原理计算冠层体积,与已有文献进行对比,平均相对误差为1.75%。【本研究切入点】变量喷雾技术可以减少药液浪费。植株几何参数信息的获取,是实施变量喷雾的重要前提。需设计一种基于三维激光点云的靶标探测系统、提出点云数量与叶面积之间存在线性关系的假设。对固定靶标进行扫描、点云数据保存、点云数据处理、统计点云数量等。【拟解决的关键问题】假设植株激光点云数量与叶面积之间存在线性关系。验证三维激光雷达作为变量喷雾系统探测部件的可行性、探究植株激光点云数量与植株叶面积的关系。
1 材料与方法
1.1 材 料
1.1.1 激光雷达模块
试验系统选用北科天绘公司生产的R-Fans-32型激光雷达。该激光雷达基于高精度激光回波信号测量技术,采用905 nm激光波长,可以有效抵抗环境背景光干扰,具备测程远、精度高、回波强度准确等技术特点。通过32线360°扫描实现三维探测成像,对运动振动以及温湿度环境有较好的适应能力。激光雷达发出探测激光束,当激光束与物体相遇后会反射回来信号,将发出的信号与反射回来的信号进行比较,利用激光的“飞行时间”来确定被扫描物体与激光雷达的距离,获得靶标点云数据[17]。图1,表1

表 1 R-Fans-32 激光雷达参数

图1 R-Fans-32激光雷达实物图
1.1.2 步进电机及其控制模块
试验系统选用普菲德57BYG250B-8型步进电机作为系统靶标探测的动力装置。该步进电机步距角为1.8°,扭矩1.2 N·m,驱动电压直流24 V。步进电机驱动器选用TB6600升级款,该驱动器是两相混合式步进电机驱动器,光耦合隔离信号输入,抗干扰能力强。输入电压直流9~42 V,输出电流0.5~3.5 A,32细分5档可调,提高了步进电机精度。步进电机控制器选用奕标科技公司生产的中文可编程步进电机控制器,型号为DKC-Y110-B44。控制步进电机带动滑台的往返运动,实现滑台的速度和位置控制。滑轨选用锐博公司生产的XG80,该滑轨承载力强、精度高、稳定性好,滑轨总长度为1 500 mm。
1.2 方 法
1.2.1 变量喷雾系统结构介绍
探测装置位于变量喷雾系统最前端对植株信息进行探测,喷雾装置位于最后端进行变量喷雾,两者有一定距离,给喷雾装置足够的反应时间。该喷雾装置采用垂直喷雾的喷施方式,将喷雾宽度、喷雾高度、喷雾深度,作为一个喷施空间。该空间对应的喷雾量随着植株信息的改变而改变,变量喷雾系统就是喷雾装置根据探测装置探测到的植株信息实现变量喷雾作业。影响喷雾量的因素有植株的几何特征参数、病虫害程度等,参数都能与喷雾量建立数学模型。以三维激光雷达作为植株探测装置,主要探测植株的几何特征参数,为变量喷雾系统提供数据支撑。图2

注:1.行走装置;2.喷雾装置;3.探测装置;4.控制装置
1.2.2 系统搭建
主要由激光雷达、滑轨、滑台、计算机、24 V直流电源等组成。该系统以步进电机控制器为核心的电机控制单元,对自动运行状态下的编程设计,实现对步进电机速度、位置的控制。首先将滑台安装在滑轨上,保证滑台可以在滑轨上自由移动。将激光雷达固定在滑台上,计算机通过以太网连接激光雷达,并通过以太网控制和接受激光雷达的输出数据,激光雷达有唯一的设备编号和MAC地址(Media Access Control Address),与计算机在同一子网内即可实现通讯。24 V直流电源为激光雷达和步进电机等供电。图3,图4
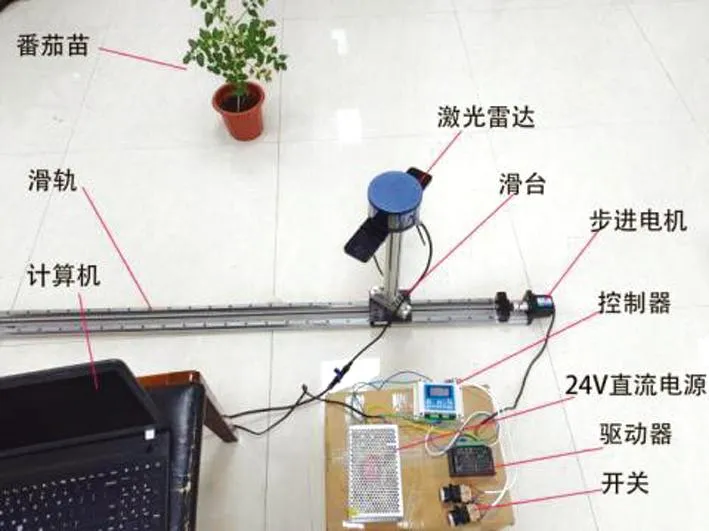
图 3 靶标检测试验系统

图 4 系统结构示意
步进电机控制器确定步进电机的运动轨迹通过程序编写来完成。试验设定步进电机的运动轨迹是:上电步进电机回零,以设定的速度进行匀速运动特定的距离,在此过程中,滑台带着激光雷达对靶标进行探测,并把探测到的数据传送至计算机进行储存,以相同的速度返回到起始位置,跳出程序结束。该控制器既有步进电机的位移和速度设定指令还有延时与跳转指令,实现滑台的往返运行。
验证R-Fans-32激光雷达应用于温室变量喷雾系统的可行性、以及探究激光点云与叶面积之间的关系。滑台较为平稳,排除外界条件对试验数据的影响,达到客观验证R-Fans-32激光雷达探测植株三维点云准确度的目的。因为此激光雷达要应用在温室变量喷雾系统上,所以采用室内作为试验条件进行试验。
1.2.3 叶面积与点云数量关系的计算
叶面积测量有直接法和间接法[18]。农药喷洒的目的就是将药水准确均匀的喷施到植株的每一片叶面上,喷雾量Q与叶面面积S存在函数关系,即Q=f(S),由于植株叶片之间相互遮挡导致直接用传感器测量叶面积密度的效果也并不是很好[19]。叶面积S可以通过叶面积密度ρ和测量该区域空间体积V的乘积得到,即S=ρV。其中ρ是表示植株冠层疏密程度的,代表单位体积内的叶面积(m2/m3)[20]。即:
(1)
假设测量区域空间内V中的叶片有n个,每个叶片的面积为Si(i=1,2,……,n),测量区域空间内的叶面积S为:
(2)
将式(2)带入式(1)可得叶面积密度ρ为:
(3)
即当测量区域空间V一定时,叶面积密度ρ随着叶面积S的增大而增大。而且叶面积越大,激光雷达输出的点云就越多。即叶面积密度ρ可以由激光点云密度ρp来表示,激光点云密度ρp的计算方法为:
(4)
其中np为探测区域体积V内的点云个数,nmax为探测区域体积V内点云的理论最大值。点云密度ρp随着探测区域内点云个数np的增大而增大。
式(1)(2)(3)(4)中,体积V、叶面积S、均可以通过测量和计算得出,要确定叶面积密度ρ与点云密度ρp之间的函数关系现只需要确定叶面积S和点云个数np之间的关系即可。
1.3 试 验
1.3.1 系统精度试验验证
试验靶标为番茄植株。用卷尺测量每株番茄苗的高度,方便与激光雷达系统测量的高度进行对比。试验时,滑台带动激光雷达以0.5 m/s的速度运动,设置激光雷达的扫描频率为10 Hz,采集不同番茄植株的点云信息,待探测的植株与滑轨中心的距离1.0 m。每次激光雷达探测的植株点云数据储存在计算机中,保存成.xyz格式。便于后期对所得的试验数据进行处理分析。对每株番茄苗进行2次重复试验,将2次试验结果的平均值作为最终试验结果。图5,表2
1.3.2 激光点云的获取与处理
激光雷达采用的是激光时间飞行原理,可以扫描范围内所有区域,并根据范围内的各个点与激光雷达的相对位置,返回测量值。测量数据为极坐标形式,返回值是被测量物体与激光雷达之间距离和与激光雷达的相对角度[21]。计算激光雷达某一方向的点坐标(x,y,z),具体计算公式如下:
A=-ωt-ω×ΔT-β.
(5)
X=R×cosθ×cosA.
(6)

图 5 番茄植株实物
Y=R×cosθ×sinA.
(7)
Z=R×sinθ.
(8)
式中,A为雷达中激光发生器偏转角度,R为该点回波距离、θ为垂直角度、β为水平角度、ω为瞬时角速度、ΔT为激光从发射到接受的时间差。
列出点云数据获取以及处理的主要过程。图6
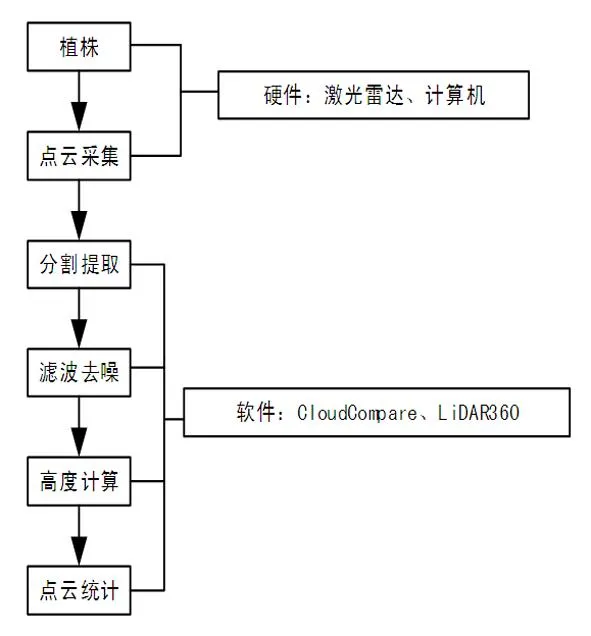
图 6 点云数据获取与处理流程
(1)激光点云的获取。使用探测系统,分别对10株番茄苗进行探测,先将平台安装好,进行调试。将激光雷达的扫描起始角度设置为-90°,扫描终止角度为+90°,将步进电机控制器调至自动运行状态,按下开关,运行激光雷达,使用激光雷达的上位机(计算机)软件CtrlView显示点云并将点云数据以.xyz的格式进行储存。图7

图 7 番茄植株点云示意
(2)靶标部分剪切提取。激光雷达获取的点云数据是整个区域的点云数据,要对特定区域内的靶标进行分析,将靶标区域进行剪切提取。使用Cloud Compare软件导入上位机(计算机)软件CtrlView所保存的点云数据,调整裁剪框的范围和方向来裁剪点云,除去非靶标点云。图8
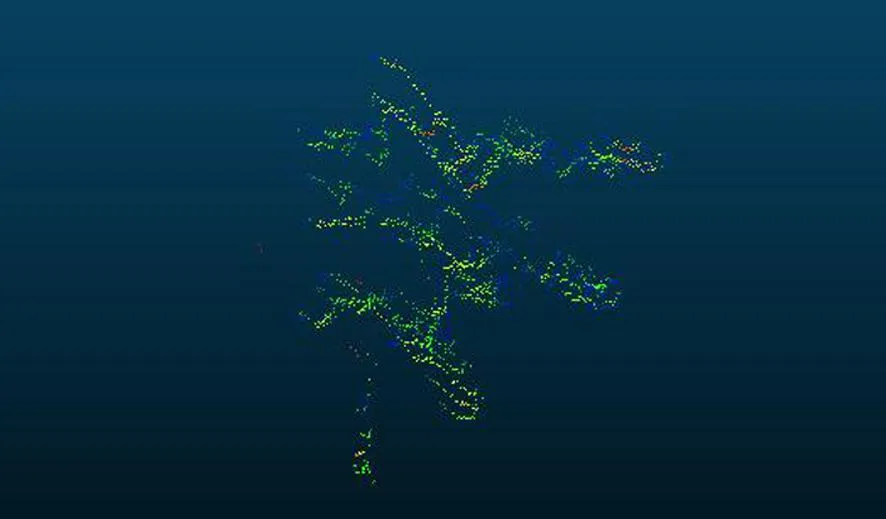
图 8 分割后的点云示意
(3)点云滤波去噪处理。在获取点云的过程中,由于设备精度的限制、周围环境条件、操作者经验带来的误差等因素的影响。点云噪声一般由离群点和噪声点产生的,所谓点云去噪就是以某一点为圆心画一个圆计算落在圆中的点云数量,当数量值大于给定值就保留该点,当数量值小于给定值就判定为无效点则删除该点,点云的滤波可以去除一部分噪声点[22]。使用高斯滤波对点云进行滤波处理,高斯滤波是对点云进行平滑处理,以便于真实反映被测物体的形貌特征[23]。图9

图 9 去噪后的点云示意
(4)植株冠层高度测量。利用LiDAR360软件的高度测量功能对单株番茄苗的点云高度进行测量,计算植株点云中最高点和最低点的垂直距离,得到植株的高度。
(5)统计点云数量。查看点云的数据信息。
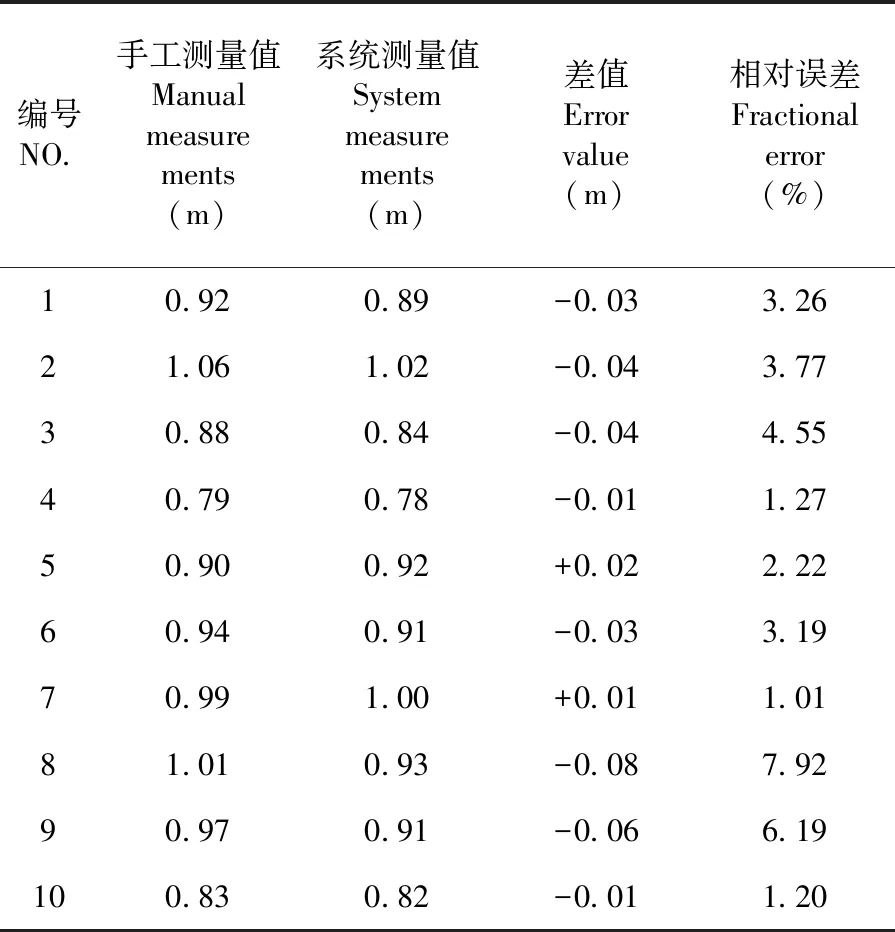
表 2 系统探测植株高度
1.3.3 叶面积计算
常用的单叶叶面积直接测量法主要有网格法、称重法、叶面积仪法、鲜重法以及打孔称重法等。网格法操作繁琐、效率低下、精度尚可。叶面积仪法操作简单、精度较高[24]。采用CL-202植物叶面积仪来测算番茄植株的叶面积。表3
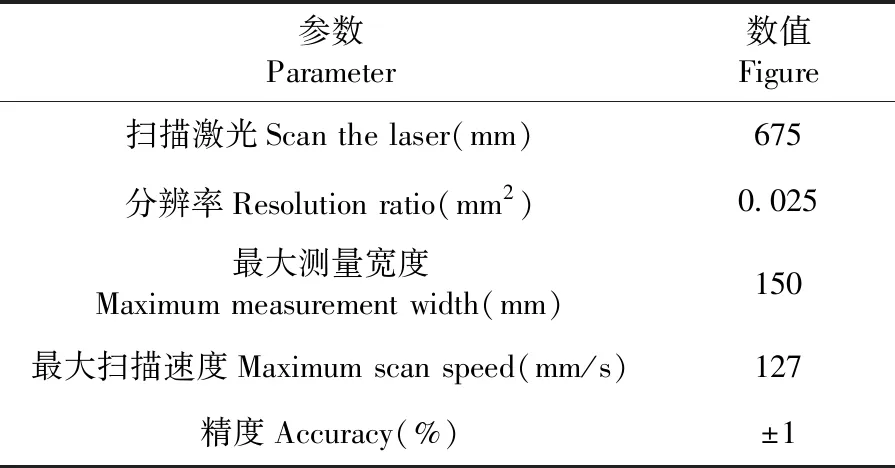
表3 CL-202植物叶面积仪参数
单株作物叶面积测量方法有单叶片累加法、抽样回归法、图像处理法[25]。根据番茄叶片大小分为大、中、小三种类型,面积分别记为S1、S2、S3。每株番茄苗上的三种类型分别采摘5片,用植物叶面积仪测量面积后取平均数记录。每株上面各类型叶片的数量分别记为N1、N2、N3,每种类型对应的面积与数量相乘,最后将各类型叶面积相加计算总面积S,即:
S=S1N1+S2N2+S3N3.
(9)
计算植物叶面积仪测量叶面积与函数拟合叶面积的相对误差
(10)
式中,Sc为经拟合函数方程计算所得的叶面积,Sc为植物叶面积仪测量所得叶面积。表4,图10
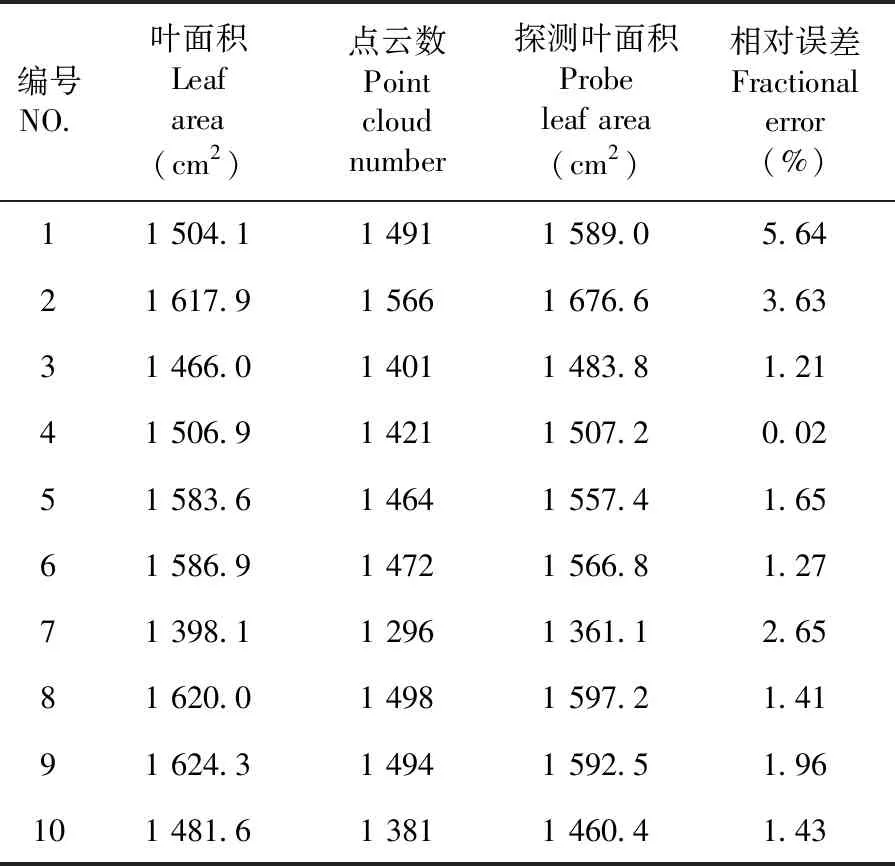
表 4 植物叶面积仪测量与系统探测

图10 CL-202植物叶面积仪
2 结果与分析
2.1 植株高度探测值与测量值线性模型
研究表明,线性模型Y=0.84X+0.122,R2=0.864 4,其中手工测量值为X,系统测量值为Y。根据激光雷达技术指标可得,测距精度0.03 m,系统测量高度与手工测量高度最大误差为0.08 m,最大相对误差为7.92%。图11

图 11 植株高度探测值与测量值线性模型
2.2 叶面积与点云数的线性模型
研究表明,拟合方程为Y=0.855 6X+131.51,其中X为植物叶面积仪测量所得叶面积,Y为点云数。拟合度为0.780 5,拟合效果较好。植物叶面积仪测量计算所得的叶面积与经拟合函数方程计算所得的叶面积之间最大相对误差为5.60%。图12
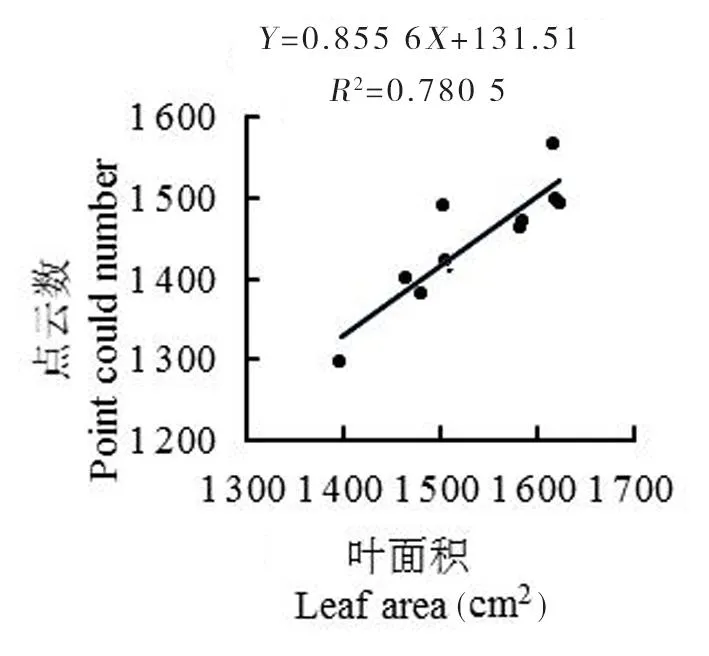
图12 叶面积与点云数的线性模型
3 讨 论
3.1系统与俞龙等[7]系统相比,能够直接计算叶面积大小,计算叶面积的大小比计算冠层体积更能体现作物的实际生长情况,更加符合变量喷雾的需求。而且激光雷达相较于超声波在靶标探测方面具有明显优势,可以快速无损的获取较为真实准确的靶标信息,受外界环境制约较小。
3.2系统与张美娜等[15]系统在方法上相比,虽然二者都是采用激光雷达进行探测,但本系统采用三维激光雷达可以直接获取作物的三维激光点云,而后者采用二维激光雷达只能间接获取三维激光点云,研究系统减少了人工处理点云数据的误差,提高了系统探测的适应性和准确性。
3.3实际的生长环境中,由于番茄苗枝叶的互相遮挡、各个叶片的倾斜角度不同、温室地面不平、探测系统振动等,都会导致激光雷达探测到的叶面积与实际叶面积有一定偏差。今后应对植株进行冠层形貌统计学分析,引入正确的作物形态校正系数,使用激光雷达探测的点云数与植株形态校正系数的组合模型表征叶面积参数来补偿测量值与真实值之间的误差。
4 结 论
4.1设计一种验证激光雷达应用于温室变量喷雾可行性的试验系统,该系统可以获取并保存植株的点云数据,植株点云数据经过后期软件处理得到植株的高度,可以较为准确的预测植株叶面积,验证该系统的探测性能以及用于变量喷雾系统的可行性。
4.2提出一种基于激光点云测量叶面积的方法,通过对植株采集点云来估算植株叶面积。采用线性模型对叶面积与点云数进行拟合,拟合度为0.780 5,叶面积与点云数存在函数关系,经系数变换可得到点云密度与叶面积密度也存在函数关系。即可以根据探测得到的激光点云来指导变量喷雾系统进行喷雾作业。
猜你喜欢
北京测绘(2022年5期)2022-11-22
中国农业信息(2022年1期)2022-05-25
农业机械学报(2021年11期)2021-12-07
汽车观察(2021年8期)2021-09-01
大气科学(2021年1期)2021-04-16
军民两用技术与产品(2021年10期)2021-03-16
世界农药(2019年3期)2019-09-10
中国交通信息化(2019年1期)2019-03-26
电子制作(2018年16期)2018-09-26
农业环境科学学报(2017年2期)2017-03-20