I2 控制单电感双输出Buck LED 驱动电源交叉影响分析
2023-12-21 09:43杨德鑫徐利梅
西南交通大学学报 2023年6期
王 瑶 ,陈 玲 ,杨德鑫 ,徐利梅
(1.西南民族大学电气工程学院,四川 成都 610041;2.重庆工业职业技术学院电子与物联网工程学院,重庆 401120)
LED 具有寿命长、能耗低以及绿色无污染等优点,在住宅照明、交通照明和景观照明等领域得到了广泛应用[1-2].由于LED 大部分情况下都是多颗同时运行,因此多颗LED 的驱动通常有单路LED 驱动电源和多路LED 驱动电源2 种方式.单路LED 驱动电源通duo 用于驱动串联连接的多颗LED,如果其中一个LED 断路,则该路LED 将全部不亮,且串联LED 需要较高的驱动电压.多路LED 驱动电源通常用于驱动多串LED,存在成本高、体积大等问题.
单电感多输出(single-inductor multiple-output,SIMO)LED 驱动电源利用一个电感给多条LED 支路提供输出,减少了元器件的数量,从而减小驱动电源的体积,降低成本[3].目前,SIMO LED 驱动电源的研究主要集中于电流的精准调节以及相应的控制方案改进等[4-6].文献[7]提出一种AC/DC SIMO LED驱动电源,该LED 驱动电源实现了每路LED 的精确独立电流控制.文献[8]提出升压型和降压型SIMO LED 驱动电源,采用回馈电流控制方法保证电源工作于宽负载范围,该方法采用一个控制回路,不能实现各个输出支路的独立调节.文献[9]提出了分时复用控制SIMO Boost LED 驱动电源,能够独立调节各个LED 支路.文献[10]提出的无电流采样电阻控制策略为提高多路LED 驱动电源可靠性提供了一种有效的解决方案.文献[11]提出一种适用于大功率照明的大范围连续可调光SIMO Buck LED 驱动电源,其采用脉冲宽度调制技术,灵活精确地控制LED 的亮度,显著提高了调光频率.文献[12]提出的SIMO LED 驱动电源实现了软开关,包括零电流开关和零电压开关,消除了较大的开关损耗,提高了电源效率.
实际上,SIMO LED 驱动电源的输出电流是相互关联的.一路输出支路的电流变化会影响其他输出支路的电流,输出电流间存在交叉影响[13].然而,目前对SIMO LED 驱动电源的交叉影响问题[14-15]报道甚少.文献[14]采用时间复用控制方案来管理开关周期,可以在LED 电流之间产生系统差异,使每个周期只有一个开关管处于导通状态,从而解决交叉影响问题.文献[15]介绍了一种基于时分复用控制和置换导通序列的连续导电模式(continuous conduction mode,CCM)SIMO Boost 驱动电源,可以同时驱动多个通道的LED,使每个通道的LED 具有相同的电流和亮度,不仅减小了电路损耗,而且降低了输出支路间的交叉影响.为简化控制,文献[16]提出了工作于CCM 的混合平均电流控制SIMO Buck LED驱动电源,用于LED 的多色调光.文献[17]提出了工作于CCM 的平均电流修正控制SIMO Buck LED驱动电源,其电感电流在每个时段能被各个LED 支路利用,提高了调光频率和发光效率,且减小了各输出支路间的交叉影响.工作于CCM 的 SIMO LED驱动电源的交叉影响问题关系其稳定性,目前还缺乏较深入的理论分析和较好的解决方法,因此,研究工作于CCM 的SIMO LED 驱动电源的交叉影响及抑制方法具有重要意义.
为减小工作于CCM 的单电感双输出(singleinductor dual-output,SIDO)Buck LED 驱动电源输出支路间的交叉影响,本文提出一种电流-电流(current-current,I2)控制SIDO Buck LED 驱动电源,详细分析其工作原理;基于状态空间平均法和电流纹波波形,建立I2控制SIDO Buck LED 驱动电源的小信号模型;通过I2控制和电压控制SIDO Buck LED 驱动电源的交叉影响传递函数,对比分析输出支路间的交叉影响大小;最后,通过实验结果验证理论分析的正确性.
1 SIDO Buck LED 驱动电源
1.1 工作原理
根据LED 的伏安特性,可以将LED 等效为开启电压源vd、理想二极管Dd和等效电阻Rd的串联电路[13,18],如图1 所示.
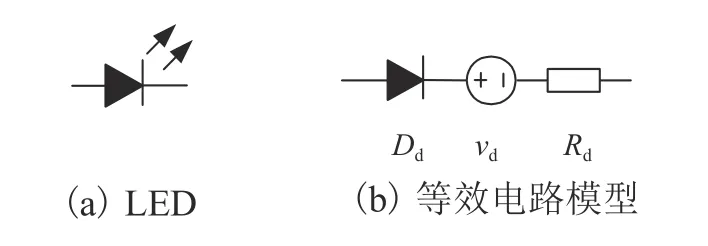
图1 LED 及其等效电路模型Fig.1 LED and its equivalent circuit model
图2 为SIDO Buck LED 驱动电源的原理图,包括输入电压vi,电感L,输出电容C1、C2,二极管VD1、VD2,开关管S1、S2,LED1输出支路和LED2输出支路.vi通过电感L将能量传递给LED1、LED2输出支路,iL为电感电流,i1、i2(v1、v2)分别为LED1、LED2输出支路的输出电流(输出电压),v1>v2.S1、S2的控制信号和导通占空比分别为Vg1、Vg2和d1、d2.
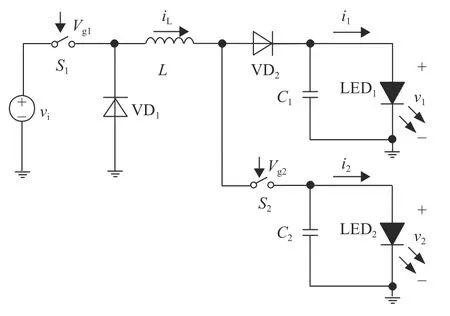
图2 SIDO Buck LED 驱动电源原理Fig.2 Principle of SIDO Buck LED driver
d1和d2存在3 种大小关系:d1<d2,d1=d2,d1>d2.当d1<d2时,SIDO Buck LED 驱动电源有3 种开关状态(开关状态Ⅰ~Ⅲ),如图3 所示.
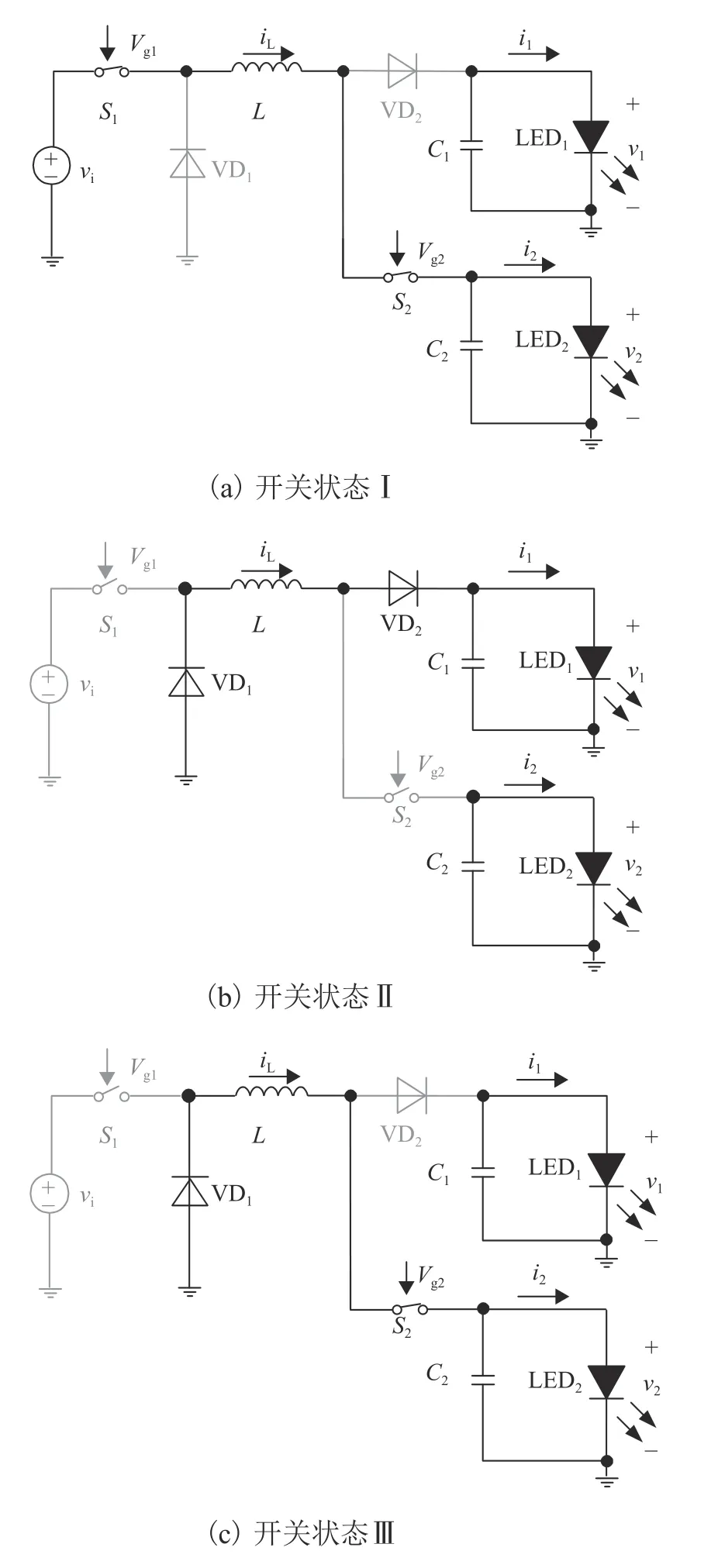
图3 3 种开关状态的电路拓扑Fig.3 Circuit topologies of three switch modes
1)开关状态Ⅰ:开关管S1、S2导通,二极管VD1、VD2关断;输入电压vi给电感L和电容C2充电,并向LED2供电;电容C1向LED1供电.
2)开关状态Ⅱ:二极管VD1、VD2导通,开关管S1、S2关断,电感L向电容C1充电,并向LED1供电;电容C2向LED2供电.
3)开关状态Ⅲ:开关管S2和二极管VD1导通,开关管S1、二极管VD2关断;电感L给电容C2充电,并向LED2供电;电容C1向LED1供电.
1.2 小信号模型
设状态变量x=[iLv1v2]T,输入向量u=[vivd1vd2]T,vd1和vd2分别为LED1和LED2的开启电压,Rd1和Rd2分别为LED1和LED2的等效电阻.SIDO Buck LED 驱动电源工作于开关状态Ⅰ、Ⅲ时,对应的状态方程分别为
式中:
采用状态空间平均方法[19],可得SIDO Buck LED驱动电源的状态空间平均模型为
式中:s为拉氏变换复变量.
2 I2 控制SIDO Buck LED 驱动电源
2.1 工作原理
图4 为I2控制SIDO Buck LED 驱动电源原理图,由图2 所示主电路和I2控制电路2 部分组成,控制电路包括I2控制电路Ⅰ和I2控制电路Ⅱ.在I2控制电路Ⅰ中,输出电流i1流过采样电阻Rs1,测取采样电阻Rs1两端电压Rs1i1获取采样后的输出电流;Rs1i1通过误差放大器AM1与参考信号iref1做差后得到信号vo1;vo1通过补偿器PI1得到放大误差信号vc1,vc1与斜坡信号vramp1相加得到斜坡补偿后的放大误差信号ve1;Rs1i1与ve1通过比较器CM1比较,其结果和时钟信号clk 分别输入触发器RS1的S 端和R 端;RS1的Q 端输出控制信号Vg1,以控制开关管S1的导通与关断.
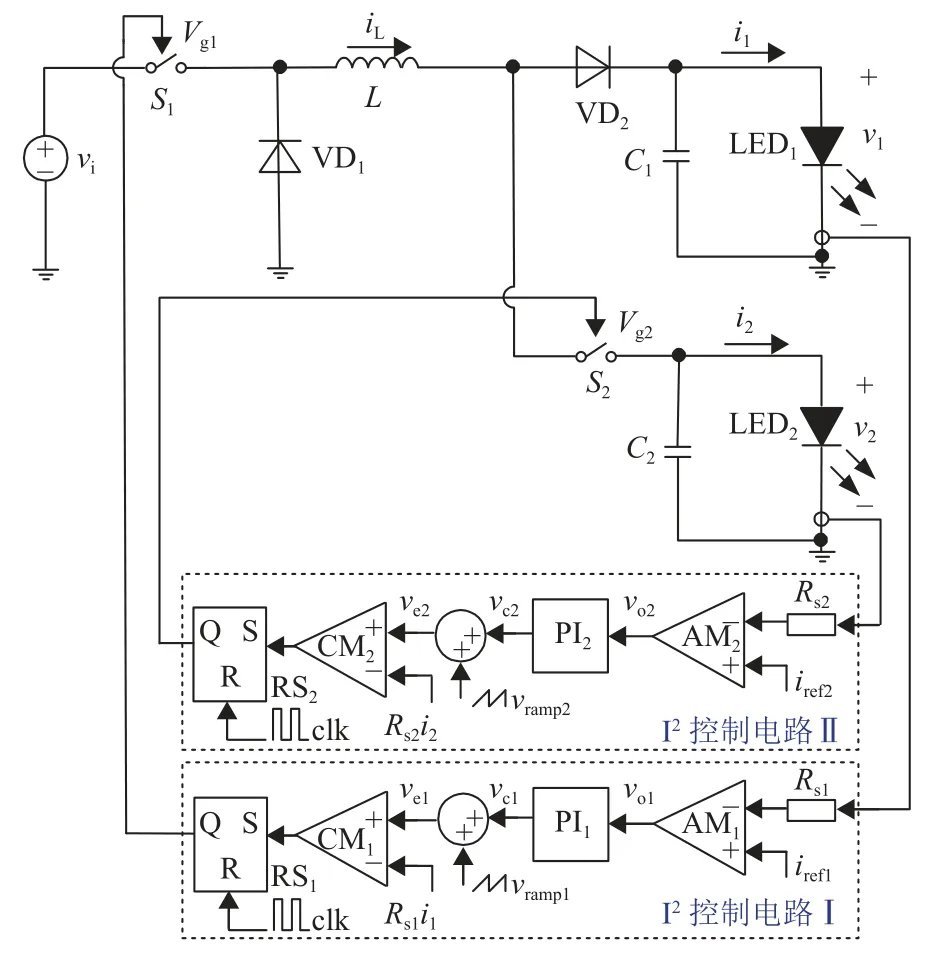
图4 I2 控制SIDO Buck LED 驱动电源原理Fig.4 Principle of I2-controlled SIDO Buck LED driver
同理,在I2控制电路Ⅱ中,输出电流i2流过采样电阻Rs2,测取采样电阻Rs2两端电压Rs2i2获取采样后的输出电流;Rs2i2通过误差放大器AM2与参考信号iref2做差后得到信号vo2;vo2通过补偿器PI2得到放大误差信号vc2,vc2再与斜坡信号vramp2相加得到斜坡补偿后的放大误差信号ve2;Rs2i2与ve2通过比较器CM2比较,比较结果和时钟信号clk 分别输入触发器RS2的S 端和R 端;触发器RS2的Q 端输出控制信号Vg2,以控制开关管S2的导通与关断.
图5 所示为I2控制SIDO Buck LED 驱动电源的控制时序,开关周期T开始时刻,Rs1i1<ve1,比较器CM1输出高电平,触发器RS1置位,Vg1为高电平,开关管S1导通;同时,Rs2i2<ve2,比较器CM2输出高电平,触发器RS2置位,Vg2为高电平,开关管S2导通;电感电流iL以斜率kL3上升,Rs1i1以斜率 -k2下降,Rs2i2以斜率k4上升.当时钟信号clk 到来,触发器RS1、RS2复位,Vg1和Vg2为低电平,开关管S1、S2关断,iL以斜率 -kL1下降,Rs1i1以斜率k1上升,Rs2i2以斜率 -k3下降.当Rs2i2下降至ve2时,比较器CM2输出高电平,触发器RS2置位,Vg2为高电平,开关管S2导通,开关管S1保持关断,iL以斜率 -kL2继续下降,Rs2i2以斜率k4上升,Rs1i1以斜率-k2下降;直至Rs1i1下降至ve1,电路进入下一个开关周期.
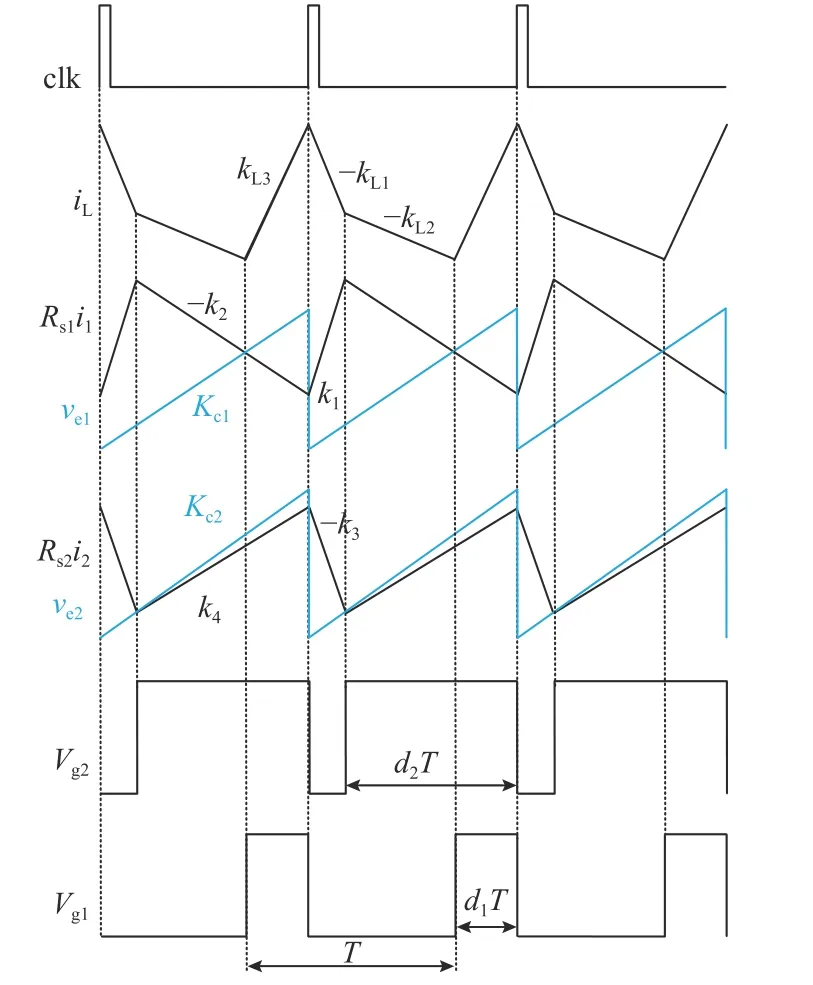
图5 I2 控制SIDO Buck LED 驱动电源的控制时序Fig.5 Control timing of I2-controlled SIDO Buck LED driver
电感电流斜率kL1、kL2、kL3分别为
2.2 小信号模型
由图4 可得放大误差信号vc1、vc2分别为
式中:kp1、kp2分别为补偿器PI1、PI2的比例系数;ki1、ki2分别为补偿器PI1、PI2的积分系数;t为时间.
由图5 中iL的纹波波形可得
由图5 中Rs1i1、Rs2i2的纹波波形可得
式中:Kc1、Kc2分别为斜坡补偿后的放大误差信号ve1、ve2的斜率,分别与斜坡信号vramp1、vramp2的斜率一致.
对式(10)、(11)中的变量施加小信号扰动量,并进行拉氏变换,得到d1、d2的小信号扰动量分别为
其中:I1、Vc1分别为i1、vc1的直流稳态量.
3 交叉影响分析
3.1 交叉影响传递函数
根据式(3)、(12)、(13)和文献[5]可得,I2控制、电压控制的SIDO Buck LED 驱动电源2 条输出支路的交叉影响传递函数Z1i(s)、Z2i(s)、Z1u(s)、Z2u(s)分别如式(14)~(17)所示.其中,下标数字1(2)表示LED1(LED2)输出支路对LED2(LED1)输出支路的交叉影响,下标字母i、u 分别表示I2控制、电压控制.
3.2 交叉影响传递函数Bode 图
根据表1 电路参数和式(14)~(17),得到Z1i(s)、Z2i(s)、Z1u(s)和Z2u(s)的Bode 图如图6 所示.交叉影响属于低频波动特性,所以,其低频增益幅值大小反映交叉影响大小.低频增益幅值越小,交叉影响越小;低频增益幅值越大,交叉影响越大[7].
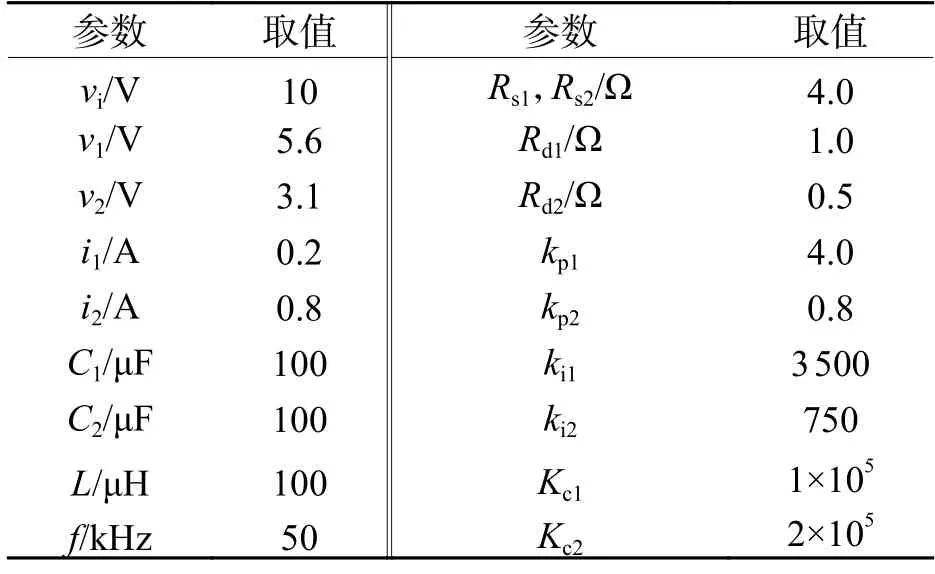
表1 I2 控制SIDO Buck LED 驱动电源电路参数Tab.1 Circuit parameters of I2-controlled SIDO Buck LED driver
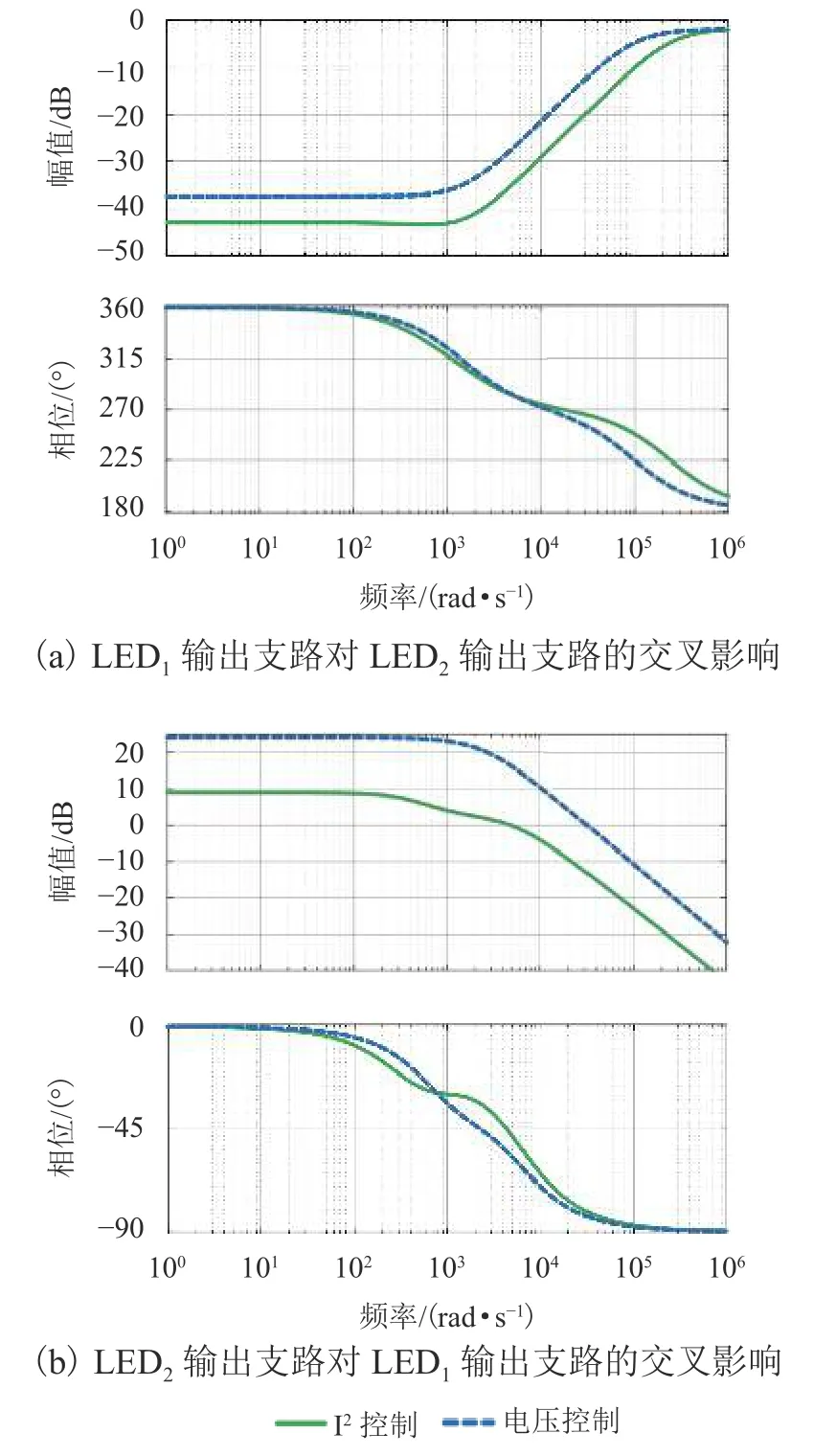
图6 交叉影响传递函数Bode 图Fig.6 Bode plots of cross regulation transfer function
从图6(a)、(b)可以看出,与Z1u(s)和Z2u(s)相比,Z1i(s)和Z2i(s)幅频曲线的低频增益均更小.说明相比于电压控制,I2控制SIDO Buck LED 驱动电源的输出支路间的交叉影响更小.
4 实验验证
为验证理论分析的正确性,设计如图7 所示的I2控制SIDO Buck LED 驱动电源实验电路,参数如表1 所示,实验波形如图8、9 所示.
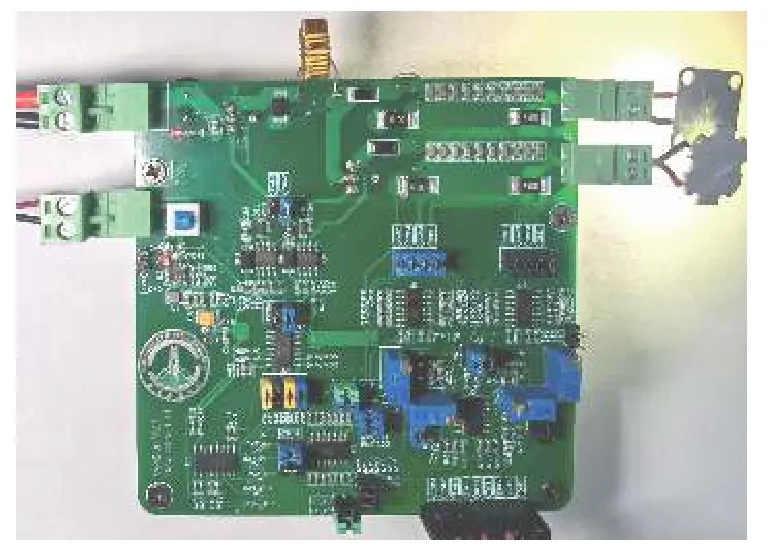
图7 I2 控制SIDO Buck LED 驱动电源实验电路Fig.7 Experimental circuit of I2-controlled SIDO Buck LED driver

图8 iref1 突变,输出电流实验波形Fig.8 Experiment waveforms of output current with various iref1
图8(a)为输出电流i2=0.8 A,iref1=1.6 V→0.8 V(i1=0.4 A→0.2 A)时,LED1输出支路对LED2输出支路的交叉影响实验结果;图8(b)为输出电流i2=0.8 A,iref1=2.4 V→1.2 V(i1=0.6 A→0.3 A)时,LED1输出支路对LED2输出支路的交叉影响实验结果.由图8(a)可知,电压控制和I2控制SIDO Buck LED驱动电源LED1输出支路对LED2输出支路的交叉影响分别为0.250 A 和0.090 A.由图8(b)可知,电压控制和I2控制SIDO Buck LED 驱动电源LED1输出支路对LED2输出支路的交叉影响分别为0.365 A 和0.115 A.由此说明,参考信号iref1突变时,I2控制SIDO Buck LED 驱动电源相比于电压控制SIDO Buck LED 驱动电源,减小了LED1输出支路对LED2输出支路的交叉影响.
图9(a)为输出电流i1=0.2 A,iref2=3.2 V→1.6 V(i2=0.8 A→0.4 A)时,LED2输出支路对LED1输出支路的交叉影响实验结果;图9(b)为输出电流i1=0.2 A,iref2=2.4 V→1.2 V(i2=0.6 A→0.3 A)时,LED2输出支路对LED1输出支路的交叉影响实验结果.由图9(a)可知,电压控制和I2控制SIDO Buck LED驱动电源LED2输出支路对LED1输出支路的交叉影响分别为0.060 A 和0.030 A.由图9(b)可知,电压控制和I2控制SIDO Buck LED 驱动电源LED2输出支路对LED1输出支路的交叉影响分别为0.04 A和0.015 A.图9 表明,参考信号iref2突变时,I2控制SIDO Buck LED 驱动电源相比于电压控制SIDO Buck LED 驱动电源,减小了LED2输出支路对LED1输出支路的交叉影响.
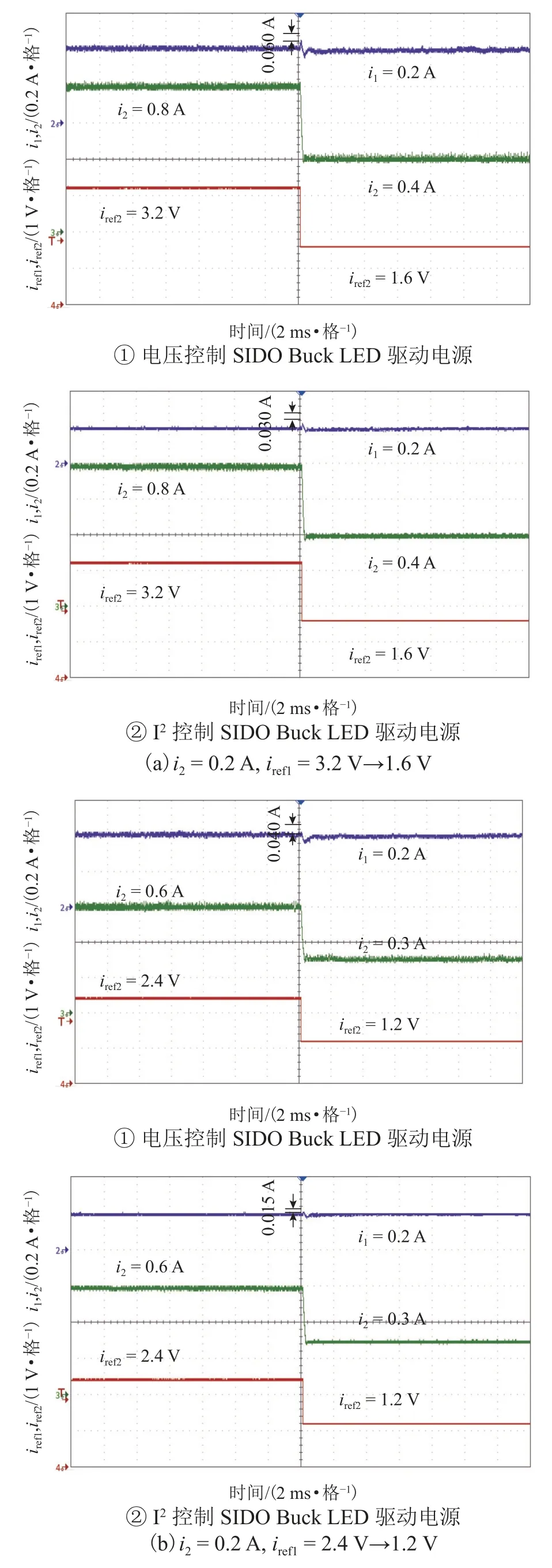
图9 iref2 突变,输出电流实验波形Fig.9 Experiment waveforms of output current with various iref2
综上,电压控制和I2控制SIDO Buck LED 驱动电源的交叉影响实验对比结果如表2 所示.相比于电压控制SIDO Buck LED 驱动电源,I2控制SIDO Buck LED 驱动电源改善了2 条输出支路间的交叉影响,验证了理论分析的正确性.
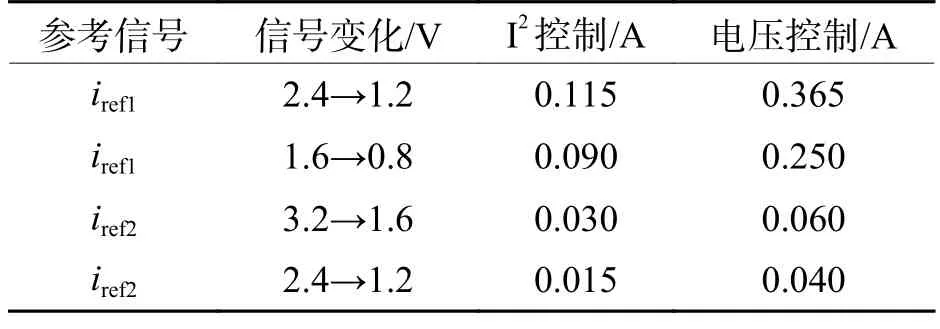
表2 交叉影响实验对比结果Tab.2 Experimental results of cross regulation
5 结论
本文在描述SIDO Buck LED 驱动电源工作原理的基础上,采用状态空间平均法,建立其状态空间平均模型;提出了能够减小输出支路间交叉影响的I2控制SIDO Buck LED 驱动电源,详细分析电路结构和工作原理,推导了交叉影响传递函数;基于交叉影响传递函数Bode 图,对比分析了I2控制和电压控制SIDO Buck LED 驱动电源输出支路间的交叉影响.理论和实验研究结果表明:相比于电压控制SIDO Buck LED 驱动电源,本文提出的I2控制SIDO Buck LED 驱动电源能够有效减小输出支路间的交叉影响.此外,本文的建模方法和研究成果可拓展至其他SIMO DC-DC LED 驱动电源.
猜你喜欢
西安石油大学学报(自然科学版)(2022年5期)2022-10-08
莆田学院学报(2021年5期)2021-11-13
甘肃科技(2020年20期)2020-04-13
通信电源技术(2018年5期)2018-08-23
电信科学(2016年9期)2016-06-15
电测与仪表(2016年1期)2016-04-12
电测与仪表(2016年13期)2016-04-11
电测与仪表(2015年16期)2015-04-12
电工技术学报(2014年7期)2014-11-15
电测与仪表(2014年13期)2014-04-04