无人蜂群分布式相干协作通信系统
2023-12-22 01:55赵浦媛马天乙闫飞宇吴道龙
现代导航 2023年6期
徐 平,赵浦媛,马天乙,刘 飞,闫飞宇,吴道龙
无人蜂群分布式相干协作通信系统
徐 平,赵浦媛,马天乙,刘 飞,闫飞宇,吴道龙
(中国电子科技集团公司第二十研究所,西安 710068)
为了解决无人(UAV)蜂群数据链系统受机载端发射功率及天线口径限制,空地通信距离受限的问题,提出了一种分布式相干协作通信系统的设计方法。基于信道反馈的校正补偿信息,蜂群节点可同时发送通信信号,在地面节点处实现相干协作信号增强。在实验室内搭建原型测试系统,通过理论分析和实测对比,验证了多节点相干协作传输的通信能力。4节点协作时,相干协作能力实测可增加10.58 dB。该方法使得在保持无人蜂群数据链端机及全向天线不变基础上,实现通信距离扩展、抗干扰能力提升变得可行。
无人机;无人蜂群;数据链;分布式相干协作通信
0 引言
近年来,局部地区冲突中无人装备频繁投入实战,在战场中的侦察监视、目标指示、精确打击等方面发挥了显著效果。现代战争正逐步向远程化、无人化和智能化发展。广泛利用全域战场空间的各类作战平台,增加可供构成杀伤链的节点数量并增进其功能和性能,依托无人蜂群作战系统,构建全域战场互联网络,形成群体智能支撑下的“马赛克战”体系,即时聚集非对称性作战效能[1-5]。
无人蜂群系统地面控制站的发射能力可远大于空中机载端;而受限于平台供电、载重、尺寸等要求,机载端机发射功率有限且多采用全向天线,无法通过增大天线物理孔径来提高增益并实现空地通信距离扩展。在前突复杂电磁环境下,可靠的抗干扰通信也是亟待解决的关键问题。这就需要利用无人蜂群的群体规模优势,将能力在无人蜂群平台之间再分配,通过信号处理实现对目标区域的高增益定向增强。
目前国内在无人集群方向分布式相干协作通信的研究较为薄弱,多处于理论研究[6-7]及仿真分析阶段[8-11],缺少相应的实测试验数据支撑。本文针对无人蜂群数据链系统的典型应用场景,提出了一种分布式相干协作通信方法,并在实验室有线环境下进行了实际测试,验证了扩展通信距离、提升抗干扰能力的有效性。
1 基本系统模型
无人蜂群分布式相干协作通信系统模型如图1所示,包含1个目的节点Node D和个分布式的协作节点Node 0~Node,来模拟1个地面控制站节点和个空中无人机蜂群节点;其中,地面控制站节点的发射能力远大于空中无人机蜂群节点,即地对空通信距离要优于空对地。在不改变任何设备及天线的状态下,利用空中节点建立分布式相干协作通信系统,实现双方通信能力的对等。
所有节点均满足时分工作,协作节点以主—从模式工作,Node 0被选举为主节点(Master),Node 1~Node为从节点(Slave)。目的节点首先将参考信号发送给所有协作节点,协作节点以选定的主节点Node 0的时钟信号为时间基准参考,将目的节点至所有协作节点(Node 0~Node)的路径相位进行累积和反转,以保证个协同节点产生的载波信号产生相干现象。所有协作节点将相干载波信号同时发送给目的节点,到达目的节点时即可进行有效叠加,实现信号功率增强,完成一次远距离的协作通信传输。

图1 多节点分布式协作相干通信系统模型
2 相干协作通信
针对无人蜂群的典型应用场景,分布式相干协作通信系统的工作流程主要划分为广播参考、主从同步和相干协作三个阶段。在广播参考阶段,目的节点发送参考信号,完成目的节点和所有协作节点间的时间、频率及相位统一。在主从同步阶段,主节点分别和从节点进行发射同步,完成协作节点间的频率、相位统一。在相干协作阶段,所有协作节点发送同一消息至目的节点,实现协作信号增强。
分布式相干协作的通信流程周期划分如图2所示。在每次的链路信号接收和信道参数估计的过程中,都会引入误差;为保证目的节点与协作节点之间的持续协作通信,需要周期性地重复进行同步校正,来满足一定的协作通信能力。
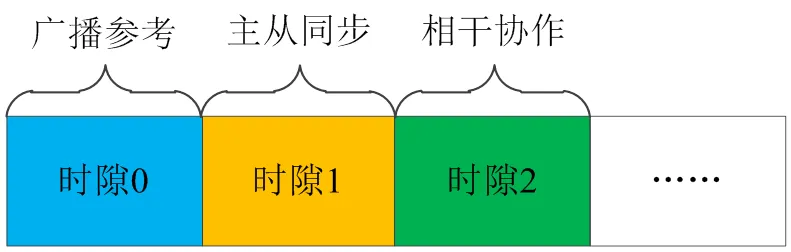
图2 分布式相干协作通信周期划分
2.1 广播参考信号
在广播参考信号阶段,如图3所示,目的节点向所有协作节点广播参考信号,所有协作节点接收到参考信号后,追踪该信号的频率及相位信息,使得本地信号振荡源与之同步。
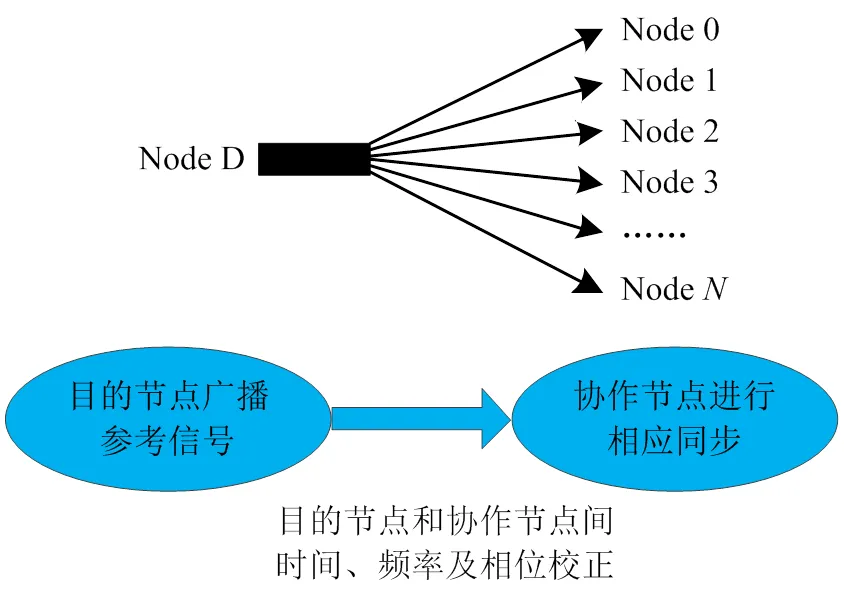
图3 广播参考信号
2.2 主从节点同步
在主从节点同步阶段,协作节点中的从节点Node 1向主节点Node 0发送从节点校正信号,主节点参考该校正信号信息校正补偿本地信号振荡源;然后发送此刻的主节点校正信号至从节点Node 1,从节点Node 1追踪该校正信号的频率及相位信息,使得从节点Node 1的本地信号振荡源与之同步。其他的从节点再逐次重复该过程,直至主节点Node 0与所有从节点(Node 1~Node)完成 同步。
基于此主从同步过程,减少了协同节点间的频率、相位误差,所有协作节点的发射频率和相位同步到了一定精度,基于此再进行协作相干通信。整个主从同步过程示意图如图4所示。
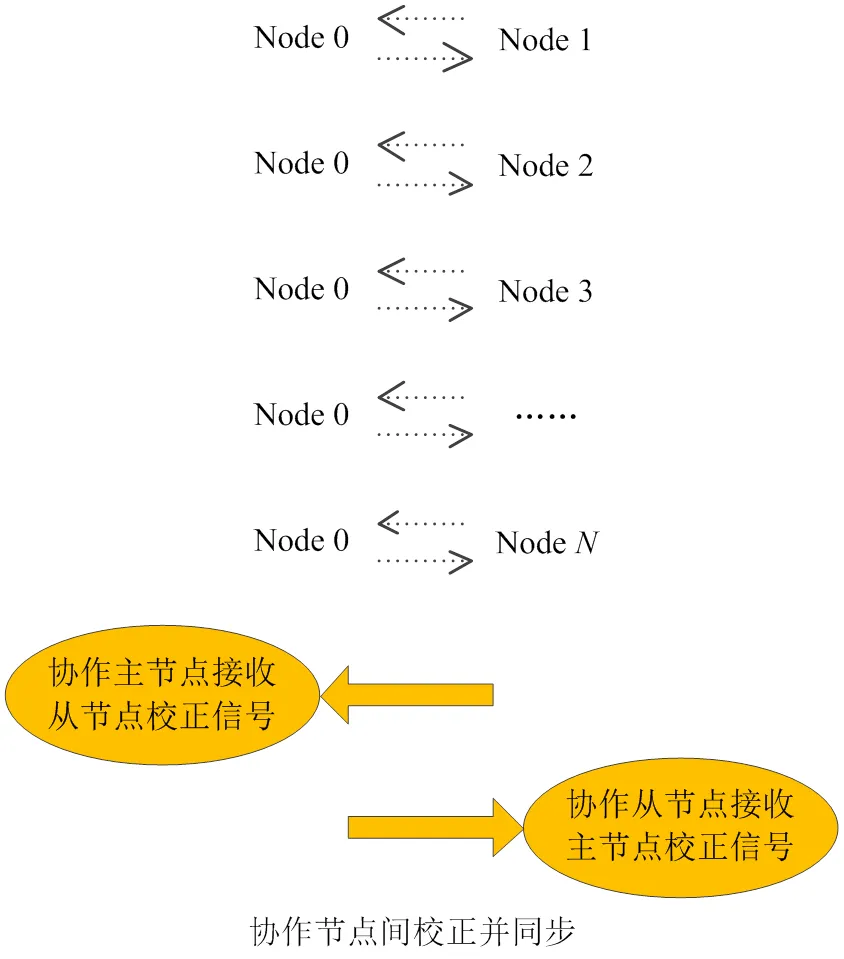
图4 主从节点同步
2.3 分布式相干协作
在相干协作通信阶段,基于前期的校正补偿调整,所有协作节点同时发送同一消息信号至目的节点Node D,在目的节点Node D的接收端处有效叠加,进而达到信号增强,实现相干协作通信,其过程示意图如图5所示。
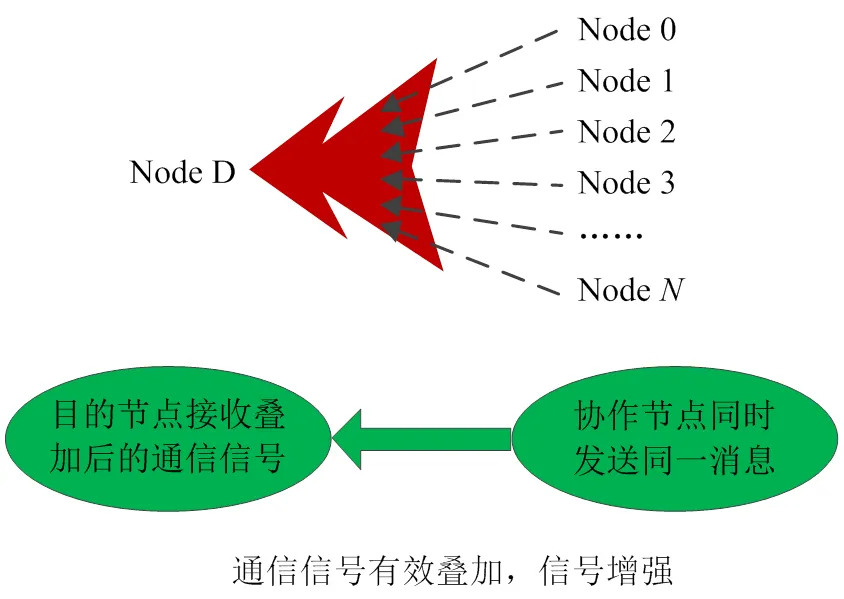
图5 相干协作通信
3 试验及性能评估

则此时,目的节点接收信号的信噪比为


在实验室有线环境下搭建1个目的节点和4个协作节点的分布式相干协同通信原型系统。如图6所示,所有节点通过有线环境实现射频互联,同时在目的节点处引出一路测试信号进入信号分析仪中观察通信信号的合成状态。搭建的无人蜂群分布式相干协作实物联试环境如图7所示。

图6 多节点分布式相干协作通信测试框图

图7 多节点分布式相干协作实物联试环境
为考核系统的多节点相干协作能力,测试时设置不同数量的协作节点参与相干协作。2节点、3节点及4节点协作时的相干协作信号接收情况分别如图8~图10所示,可看出多节点协作后通信信号功率值均高于单节点工作的通信信号功率值。

图8 2节点协作时的信号合成图

图9 3节点协作时的信号合成图
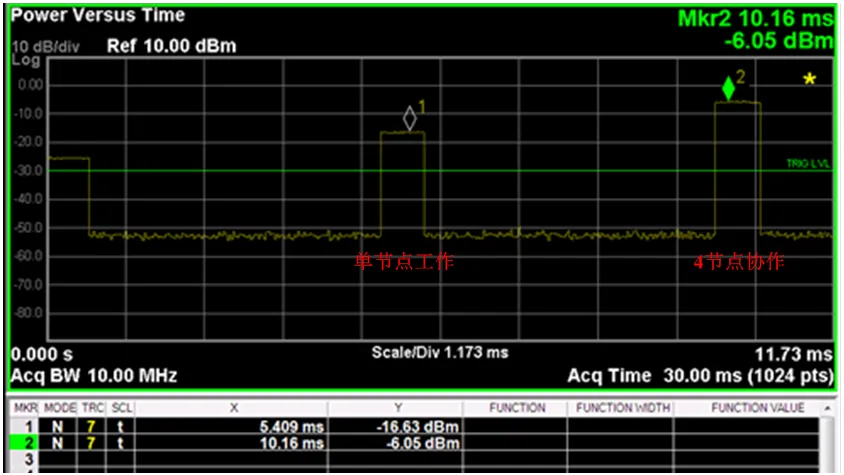
图10 4节点协作时的信号合成图
相干协作通信能力的实测结果如表1所示,可以看出随着协同节点数量增加,协作通信能力逐渐增大,与理论分析基本相符。4节点协作时,协作能力可增加10.58 dB,可有效扩展空地通信距离至两倍以上,验证了分布式协作相干通信实现无人蜂群空地通信距离扩展、抗干扰能力提升的有效性。

表1 分布式相干协作通信能力实测结果
4 结语
本文提出了一种针对无人蜂群数据链系统的分布式相干协作通信方法,基于信道反馈信息的校正补偿及调整,所有蜂群节点可同时发送通信信号,在地面节点处实现相干协作信号增强,从而扩展空地通信距离、提升系统抗干扰能力。实验室内的实测数据符合理论分析计算,也验证了系统运行的可行性。
[1] G. J. Foschini. Layered space-time architecture for wireless communication in fading environments when using multi-element antennas[J]. Bell Labs Techn,1996,1(2):41-59.
[2] A. Sendonaris,E. Erkip,B. Aazhang. User cooperation diversity Part II:Implementation aspects and performance analysis[J]. IEEE Trans. Commun,2003,51(11):1927-1938.
[3] A. Sendonaris,E. Erkip,B. Aazhang. User cooperation diversity Part I:System description[J]. IEEE Trans. Commun,2003,51(11):1927-1938.
[4] Y. Jing,H. Jafarkhani. Single and multiple relay selection schemes and their achievable diversity orders[J]. IEEE Trans. Wireless Commun,2009,8(3):1414-1423.
[5] V. Havary-Nassab,S. Shahbazpanahi,A. Grami. Optimal distributed beam-forming for two-way relay networks[J]. IEEE Trans. Signal Process,2010,58(3):1238-1250.
[6] 胡瑞东. 无线传感器网络中的分布式发射波束形成技术的研究[D]. 哈尔滨:哈尔滨工业大学,2015.
[7] 朱师妲. 无线传感网中基于波束成形的协同传输方法[D]. 哈尔滨:哈尔滨工业大学,2016.
[8] 何金梅,王薪基. 基于分布式回复反射波束聚焦的无线能量传输[J]. 电子科技,2015,28(8):1-4.
[9] 林孟涵,林则瑜,王文杰. 基于单比特反馈的分布式多点协作微波输能方法[J]. 信号处理,2019,35(4):720-726.
[10] 王文杰,殷勤业,王晨,等. 一种基于通道校正的分布式天线阵列波束形成方法[P]. CN101227242A. 2008.
[11] 穆鹏程,王文杰,殷勤业,等. 远距离无线通信系统中的分布式相干协作方法[P]. CN102523619B. 2014.
Distributed Coordinated Coherent Communication System for UAV Swarm Application
XU Ping, ZHAO Puyuan, MA Tianyi, LIU Fei, YAN Feiyu, WU Daolong
In order to solve the problem of air-to-ground communication distance due to the limitation of transmitted power and antenna size in Unmanned Aerial Vehicle (UAV) swarm data link system, a method of distributed coordinated coherent communication system is proposed. Based on the adjusting and compensation of channel feedback, the UAV swarm nodes can transmit the communication signal simultaneously, and then the coherent received signal can be obtained in the ground node. A prototype system is built in the laboratory. Comparison of the theoretical analysis and measured data, the capacity of multi-node coordinated coherent transmission is verified. Experimental results show that the power gain is increased 10.58 dB when 4 nodes are coordinated. The proposed method makes it possible to expand communication distance and improve anti-jamming ability while the UAV swarm data link terminal and omnidirectional antenna remain unchanged.
UAV; UAV Swarm; Data Link; Distributed Coordinated Coherent Communication
TN929
A
1674-7976-(2023)-06-442-04
2023-11-10。
徐平(1988.04—),山东聊城人,博士研究生,高级工程师,主要研究方向为无人集群数据链系统。
猜你喜欢
小哥白尼(军事科学)(2020年4期)2020-07-25
小哥白尼(军事科学)(2019年2期)2019-04-17
小哥白尼·趣味科学画报(2019年12期)2019-02-28
制造技术与机床(2017年6期)2018-01-19
岷峨诗稿(2017年4期)2017-04-20
新高考(英语进阶)(2017年12期)2017-02-26
电测与仪表(2016年24期)2016-04-12
现代计算机(2016年17期)2016-02-28
探测与控制学报(2015年4期)2015-12-15
湖南农业(2015年5期)2015-02-26