基于前馈神经网络的分数阶事件触发控制器实现及应用研究
2023-12-29 12:36于南翔
重庆邮电大学学报(自然科学版) 2023年6期
于南翔,朱 伟
(1.重庆邮电大学 计算机科学与技术学院,重庆 400065;2.重庆邮电大学 复杂系统智能分析与决策重点实验室,重庆 400065)
0 引 言
随着工业化进程的深入推进,对控制系统的精度和效能的要求日益加剧。在众多控制系统设计中,研究者们不仅要对被控系统进行细致和准确的建模,还必须应对通信网络带宽、实时在线资源,以及控制系统的计算与处理能力等实际约束。在这些限制条件下如何高效实施控制流程,已成为现代控制学研究的焦点和挑战。为了实现高效率的控制,需要对被控制系统进行更为精细和深入的描述,以便更准确地捕捉系统的动态行为,还需要探索和发展更为高效、先进的控制方法。
为了对被控制对象进行深入的理论研究与建模分析,借助分数阶微分方程来描述动力系统已经成为一种较为有效的方法,这就是所谓的分数阶系统[1]。分数阶系统可以视为整数阶系统的一种推广,提供了一种更为精确和通用的描述复杂动态系统的方法,能够捕捉到整数阶模型无法描述的系统动态特性,在物理学、电化学、生物学、粘弹性及混沌系统的研究中展示了独特的应用潜力[2-6]。近年来,随着分数阶理论在工程领域的应用逐渐增多,分数阶系统的理论及其应用研究逐渐成为了众多学者关注的焦点[7-8]。
当分数阶理论在精确描述控制系统方面展现出极大优势的同时,人们对于控制方法和控制效率的追求也在持续发展和提升。尤其是,伴随着被控系统实际约束条件的增加,如何降低各类资源消耗,并维持可靠的控制性能是控制器设计需要考虑的关键问题之一。如何提高控制系统的控制效能(即保持控制性能的前提下,减少计算资源与通信带宽消耗)是研究者不断追求的目标。近年来发展起来的事件触发控制(event-trigger control,ETC)技术是一种很好的解决策略。ETC策略的主要思想是,在满足某个预定条件下产生触发控制动作,相较于传统的固定时间触发控制策略,ETC策略可以在保证期望性能的同时显著减少控制的次数,ETC策略可被认为是一种按需控制理论[9]。1999 年 K. Åström和 B. Bernhardson在文献[10]中比较了传统等间隔周期采样控制和基于事件触发控制2种方法对一阶随机动态系统的控制性能,结论得出,基于事件触发控制的采样频率远远小于传统等间隔周期采样控制,并且可以达到与后者几乎完全相同的控制性能。基于事件触发控制理论已成功应用多种控制领域,取得了丰富的理论研究成果[11-14]。 将分数阶建模理论与事件触发控制理论相结合,可实现对复杂分数阶系统的高效、精确控制。这种结合不仅能够更好地描述和分析实际系统的动态行为,还能够在保证控制性能的同时,优化系统的资源消耗。具有广泛的应用前景和理论研究价值。
理论研究的终极目标始终是应用于实际,以实现对人类社会的贡献。这一原则对于分数阶事件触发控制理论的研究亦然。尽管分数阶事件触发脉冲控制领域已有众多理论成果,但其在实际应用中仍存在显著差距。这一差距不仅源于现实世界的复杂性,还因为无论是传统的事件触发控制方法还是事件触发脉冲控制方法,其控制算法均依赖于被控制系统的数学模型。在面对难以建模或无法建模的被控制系统时,这些传统方法往往难以施展,尤其是无法直接应用于当前流行的数据驱动系统的控制当中,该类控制系统控制过程以数据流为主,是典型的无模型控制系统[15-16]。因此,开发部分或完全不依赖于模型的事件触发控制算法显得尤为重要和迫切。
另一方面,人工神经网络模拟了人类大脑的工作机制,是一种通过数学方法构建的分析模型[17]。根据结构的不同,神经网络可以分为前馈网络、反馈网络和自组织网络。前馈网络的特征在于神经元被分为多个层次,且仅相邻层次之间存在连接。反向传播神经网络(back propagation,BP)和径向基函数神经网络(radial basis function,RBF)是2种较为主要的前馈神经网络模型。1986年,Rumelhart等[18]提出了多层神经网络学习过程的数学原理,自此,前馈神经网络开始受到广泛的学术关注。研究表明,单隐层的前馈神经网络能够以任意精度逼近任意函数[19]。文献[20]提出了一种基于神经网络的传染病模型识别和预测方法,该方法通过识别与时间相关的参数来拟合现有数据,进而量化了大流行病预测及控制措施的不确定性。鉴于前馈神经网络对数据的高效拟合能力,文献[21]进一步提出了一种基于多层前馈神经网络的移动机器人避障控制器,该控制器通过学习混合位置轨迹以及虚拟力,实现了对机器人避障的有效控制。
基于分数阶理论在精确描述控制系统方面的优势、前馈神经网络能以任意精度逼近任意函数的特性以及事件触发控制在节约控制资源方面的长处,将前馈神经网络引入到传统的分数阶事件触发控制器设计领域将具有非常大的理论意义与应用价值。由于训练完成的神经网络可以看成是数据驱动的二端口控制模块,既可以摆脱对具体数学模型的依赖,又可以提高该控制器的普适性和使用的灵活性。因此,对传统分数阶事件触发控制器的底层控制规律的学习是实现前馈神经网络与事件触发控制充分融合的关键。
综上分析,本文提出一种新的基于前馈神经网络的分数阶事件触发控制器的实现方法,为了保证系统的控制效能,考虑基于多层前馈神经网络对现有事件触发控制器进行有监督学习,通过训练得到无模型依赖的事件触发控制器,从而有效地解决了传统事件触发控制策略对具体数学模型的依赖的问题。对训练得到的控制器进行仿真测试显示,不仅能有效减少控制器对系统的计算资源和网络带宽的消耗,同时还能显著降低事件触发的控制次数。最后,将所得到的方法应用于房间温度控制系统中,实验结果表明,本文所以提出方法的有效性与可移植性较好。
1 准备知识
1.1 分数阶微积分理论
相较于其他形式的分数阶导数的定义,由于Caputo分数阶导数不含超奇异性的部分,另外基于此定义的分数阶微分方程具有与传统整数阶微分方程相同形式的初始条件,因此,本文将采用Caputo分数阶导数定义来研究相关连续时间动力系统。
定义1函数x(t)的Caputo分数阶导数定义如下
(1)

定义2函数φ:[a,b]→R为勒贝格可积函数,则其α∈(0,1)阶分数阶积分定义如下
(2)
定义3Mittag-Leffler函数定义如下
(3)
当β=1时,该函数变为
(4)
Mittag-Leffler函数通常用于研究分数阶动态系统的动态行为。
1.2 传统的分数阶事件触发控制系统
考虑以下分数阶连续时间动态控制系统。
(5)
(5)式中:α∈(0,1);x(t)∈Rn和u(t)∈Rm分别是状态和系统控制输入;f:Rn×Rm→Rn满足f(0,0)=0,相关事件触发的脉冲反馈控制器如下
(6)
(6)式中:x(t-)表示x(t)的左极限;g:Rn→Rm,h:Rn→Rn,满足g(0)=0,h(0)=0。事件触发时刻tk由如下迭代形式确定。
tk+1=inf{t:t>tkandF(t)≥0}
(7)
(7)式中,F(t)被称为触发函数,定义如下
F(t)=‖e(t)‖-β‖x(tk)‖
(8)
(8)式中:β∈(0,1),e(t)=x(tk)-x(t)表示测量误差。
假设以上的控制系统,其控制器的输入、输出可以通过某种方式来测量或观测。本文的研究目标以同步采集到的控制器两端的数据对为训练集,构建前馈神经网络来学习这个控制策略,最终,用训练得到的网络替代传统的控制器。
1.3 前馈神经网络
鉴于单隐层的前馈神经网络已被证实能以任意精度逼近任意函数[19],且最新的研究进一步揭示了其能够以任意精度逼近具有有限间断点的非线性复杂函数映射,展现出在非线性映射能力、泛化能力及容错能力方面的显著优势[22],因此,基于该网络学习实现事件触发控制器是完全切实可行的。
典型的前馈神经网络通常包含输入层、隐层和输出层。一般隐层数越多,模型的非线性表示能力越强,因而模型能够拟合的结果就越复杂。本文采用双隐层的前馈神经网络,各层的形式如下。
1)输入层。x1,x2,…,xn为神经网络的n个输入,表示为向量形式如下
X=[x1,x2,…,xn]T
(9)
2)第一隐层。

(10)
(10)式中,m为第一隐层神经元的数量。
②加权求和与激活:第一隐层神经元完成对输入信号的加权求和,并加上阈值偏置,然后通过激活函数f1(·) 进行非线性变换得到输出为
(11)
(11)式中,f1为激活函数,常用的激活函数包括Sigmoid函数、双曲正切函数(tanh)等,本文中选用第2种形式,其表达式为
h1(z)=tanh(z)
(12)
3)第二隐层。
①权值和阈值:第一隐层到第二隐层的权值矩阵表示为W2;第二隐层的阈值向量表示为b2。
②加权求和与激活:第二隐层神经元对第一隐层的输出进行加权求和,加上阈值偏置,然后通过激活函数f2(·)进行非线性变换得到输出为
(13)
激活函数形式同上。
4)输出层。
①权值和阈值:隐层到输出层的权值向量表示为v,输出层的阈值为标量c。
②输出计算:输出层神经元的最终输出是通过加权求和和激活函数计算得到
y=g(vTh2+c)
(14)
(14)式中,g(·)是输出层的激活函数,同样可以根据任务的不同选择不同的函数形式。
训练过程中,对于第k组样本,神经网络的输出值与期望值的平方误差为
(15)

(16)
本文涉及的事件触发控制器本质上是一个两输入、一输出非线性函数。后续基于前馈神经网络学习并替代该控制器,对传统分数阶事件触发控制器的学习为一个有监督学习过程。
2 算法实现
为了得到无模型依赖的事件触发控制器,本文采用前馈神经网络在线学习的方式实现,具体结构如图1所示。前馈神经网络的有监督学习数据源于传统事件触发控制器的两端,通过同步触发实现有监督学习的数据采集获取,零阶保持器(ero-order holder,ZOH)辅助完成数据的转发,最终完成网络训练。

图1 基于神经网络(NN)的有监督学习Fig.1 Neural network (NN) based supervised learning
神经网络(neuro network,NN)通过2个零阶保持器(zero-order holder,ZOH)同步获取事件触发控制器的输入与输出数据,用以完成在线有监督学习。本文搭建的神经网络的输入层含有2个神经元,分别对应事件触发函数中的‖e(t)‖和‖x(tk)‖。实际构建的神经网络的2个隐层分别含有8和5个神经元,输出层含有1个神经元对应于事件触发控制器的输出,该网络的具体结构如图2所示,为全连接形式的前馈神经网络。
给定神经网络相应的输入层、隐含层以及激励函数之后,训练过程便是结合期望输出与实际输出的平方误差值,调整网络的连接权重,最终完成网络训练。
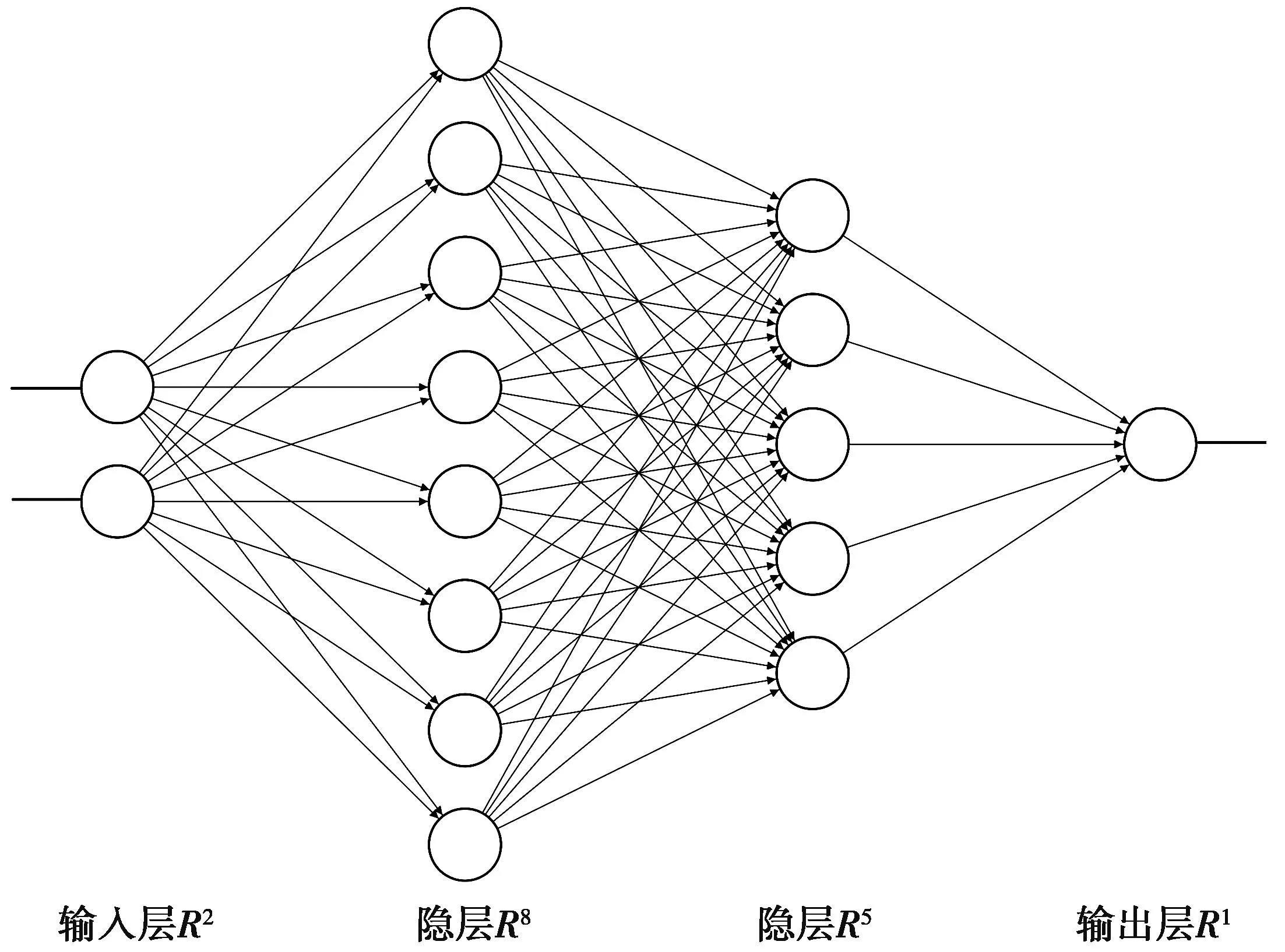
图2 前馈神经网络结构Fig.2 Feedforward neural network structure
本文在前述相关理论的基础上,利用MATLAB的深度学习工具箱,搭建双层前馈神经网络,训练过程所使用的数据采集自实际的分数阶事件触发控制系统的控制器输入、输出信号,隐含层数为2层,隐含神经元13个,权值的调整规则选用梯度下降法。
3 仿真分析
为了验证所提出的算法的有效性,在仿真环境中搭建了一个由传统事件触发控制器控制的主从混动同步系统。我们选取分数阶Jerk混沌系统作为主从系统的实例,利用同步采集到的传统控制器两端的数据作为训练集,进行前馈神经网络的训练。这样做的目的是最终实现一个不依赖于具体模型的事件触发控制器。
主系统方程如下
Dαx(t)=Ax(t)+f(x(t))
(17)
(17)式中,α=0.99,f(x)=[0,0,|x1|+1]T,
从系统方程为
Dαy(t)=Ay(t)+f(y(t))-u(t)
(18)
(18)式中,u(t)为控制输入,其定义为
(19)
文献[23]已经证明在传统的事件触发控制下,该主从系统能够实现指数稳定意义下的同步,传统事件触发控制下的同步控制效果以及脉冲控制时刻分别如图3和图4所示。

图3 Jerk主从系统同步效果图Fig.3 Synchronization effect of master-slave Jerk system

图4 传统事件触发脉冲控制时刻Fig.4 Traditional event-triggered impulsive instants
以传统的事件触发控制器的输入、输出为数据源,对其进行有监督学习,最终训练得到基于神经网络的事件触发控制器。在被控系统参数不变的条件下,将传统控制器替换成训练得到的神经网络控制器。基于前馈神经网络的事件触发控制器的脉冲控制时刻如图5所示。从图5可以看出,在保证同步控制效果的同时,触发的次数相较于传统的事件触发控制方法明显减少。因而可以进一步节约系统的带宽以及控制资源的消耗。另外,基于前馈神经网络的事件触发控制器相对于传统的事件触发控制器的一个明显优势是不再依赖被控系统的数学表达式,具有更强的普适性,能够方应用于其他控制场景。
为了验证本文提出的基于前馈神经网络得到的事件控制器的可移植性,图6展示的是将MATLAB内置范例House Heating System中的温度控制器换成本文训练得到的事件触发控制器,温度控制过程中事件触发控制仿真结果表明,只需添加一定的比例调整以及零阶保持器,即可完全替代传统的控制系统,仿真过程中外部环境温度以正弦信号代替,本系统可实现将房间温度保持在设定温度附近可靠工作。图7展示的是事件触发控制器的脉冲控制时刻,由于采取的是事件触发控制思想,因此,本文所提出的控制器,优于传统的连续温度控制算法,可在减少非必要能源消耗的同时,保证用户对环境温度的控制效果。
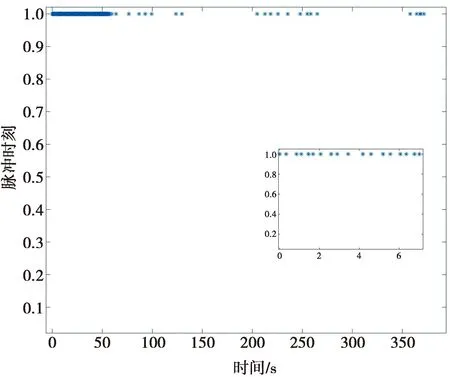
图5 基于前馈神经网络的事件触发脉冲时刻Fig.5 Feedforward neural network-based event-triggered impulsive instants

图6 房间温度控制系统Fig.6 Room temperature control system
图8为房间温度及室外环境温度曲线。从图8可以看出,本文训练得到的控制器对房间温度有较好的调控效果,能够将环境温度稳定控制在23 ℃附近,摆脱了对控制系统模型的依赖。同时,仿真实例进一步说明控制器有较好的移植性,即本文通过前馈神经网络对某一分数阶事件触发过程进行学习,最终得到不依赖被控系统数学模型的控制器,完全可以应用于其他控制系统当中。另外需要说明的是,本实验原始的温度控制系统是一整数阶系统,这进一步说明本文得到的分数阶控制器完全能够适用于整数阶情况。
4 结束语
本文借助前馈神经网络对传统分数阶事件触发控制器进行有监督学习,从而得到无模型依赖的事件触发控制器。又由于分数阶系统可以看成是整数阶系统的推广,因此,本控制器能够适用于整数阶系统当中。研究表明,本文提出的基于前馈神经网络的分数阶事件触发控制器能够有效克服传统事件触发控制器对具体数学模型的依赖,能够在保证事件触发控制算法优势的同时具备较好的移植性。为相关的研究提供了新的思路。仿真结果进一步显示本文算法具有较好的收敛性与可靠性。未来拟在非监督学习方向进一步开展相关研究。

图7 房间温度调节控制脉冲时刻Fig.7 Room temperature adjustment impulsive times
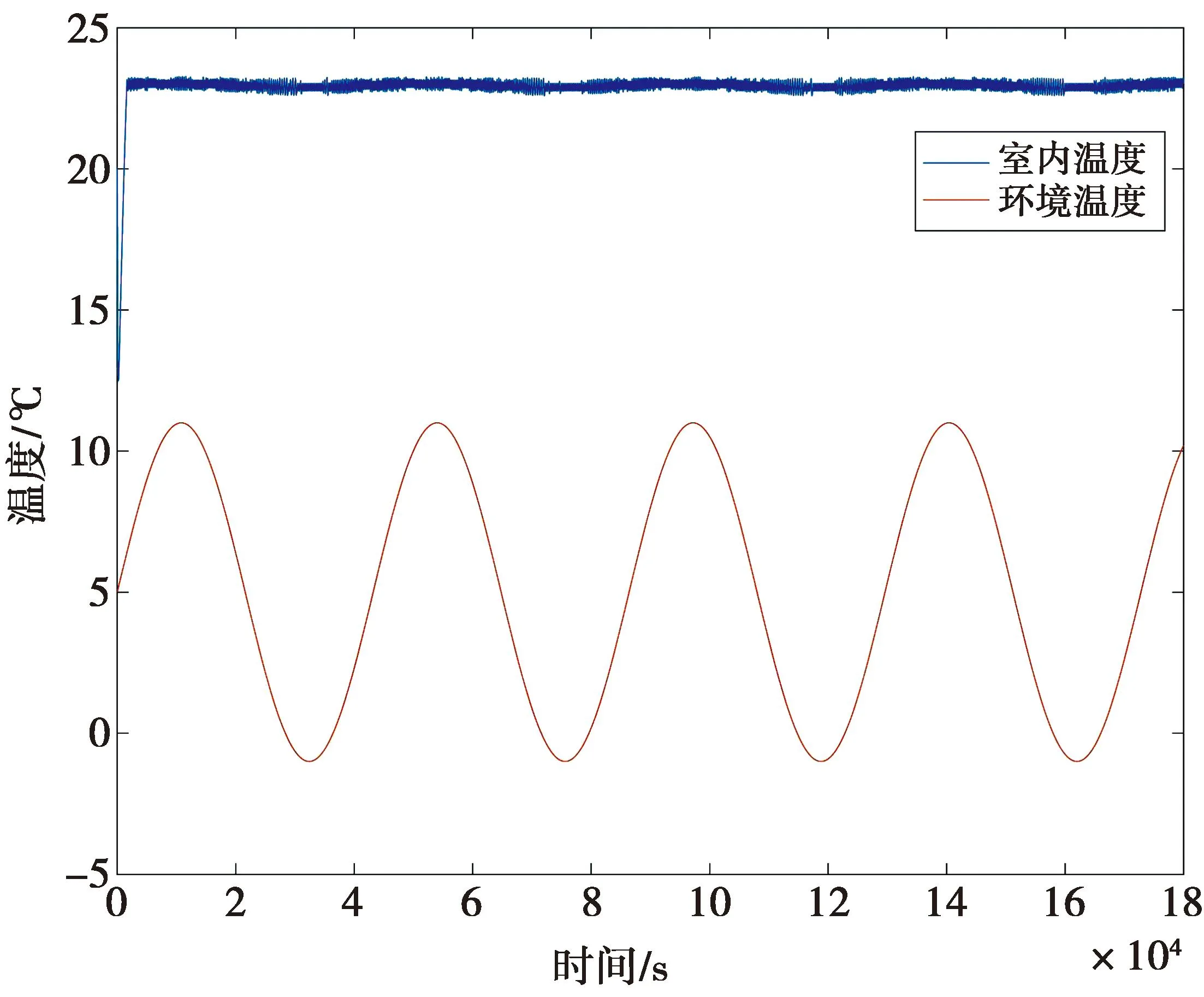
图8 房间温度与户外环境温度Fig.8 Room temperature and outdoor ambient temperature
猜你喜欢
电子制作(2019年19期)2019-11-23
人民珠江(2019年4期)2019-04-20
重型机械(2016年1期)2016-03-01
大连工业大学学报(2015年4期)2015-12-11
海军航空大学学报(2015年4期)2015-02-27
计算机工程(2014年9期)2014-06-06
机械工程与自动化(2014年3期)2014-05-07
筑路机械与施工机械化(2014年4期)2014-03-01
自动化博览(2014年9期)2014-02-28
自动化博览(2014年4期)2014-02-28