基于电压波形分割-聚类的配电网弧光接地辨识方法研究
2023-12-29 07:48吴义辉龙国华范瑞祥
电瓷避雷器 2023年6期
李 琼,吴义辉,龙国华,邹 阳,范瑞祥
(1.国网江西省电力有限公司电力科学研究院,南昌 330096;2.南昌航空大学信息工程学院,南昌 330063)
0 引言
根据调查显示,超过80%的停电损失是由于配网故障所造成的,所以配网故障诊断一直是供电单位重点研究领域。并且弧光接地故障产生机理复杂,是接地故障中难以检测的一类。特别是随着分布式电源接入配电网,大量的电力电子器件带来的谐波和噪声也增加了弧光接地故障诊断的难度。因此,提出一种高效可靠的弧光接地辨识算法对配电网的稳定运行有重要意义。
线路的电压和电流的波形具有丰富的故障相关信息[1],因此已有许多研究通过对电压、电流的波形特征来检测故障。如文献[2-4]通过建立Cassie-Mayr组合仿真模型,分析其暂态特性和关键性因素以及交流侧的弧光过电压穿越特性,实现了弧光接地故障的辨识。文献[5-6]依据弧光接地故障的零序电压和零序电流之间的关系,提出了基于零模电压、零模电流的极间特性和伏安特性的检测算法,实验表明该算法的灵敏性和可靠性有所平衡。文献[7-9]分别提出了提出结合线路的零序电流、母线的零序电压以及两者之间的关系的方法、基于电流不平衡度突变、暂态分析和故障累积等检测法对弧光接地故障暂态特征进行分析,结果表明由于单次接地时间较短,有时需要几种算法共同进行辨识。
文献[10]通过匹配滤波检测及参数控制相结合的方法,提出弧光接地过电压传输参数辨识模型,该辨识模型输入参数较多,部分参数出现冗余。文献[11]建立了中性点接地仿真模型,发生故障时,零序电流的幅值和相位均有较大差异,文献[12]依据以上特征,提出一种注入电流增量故障检测法。通过测量零序电压和零序电流的变化量实现对弧光接地故障辨识,但在纯电阻电路中,过度电阻较大时,该方法识别准确率降低。文献[13-15]分别提出基于支持向量机与卷积神经网络的辨识办法和结合变分模态分解、改进多尺度模糊熵和支持向量机的配电网电压辨识办法。通过对时频域矩阵进行奇异值分解,将波形奇异谱参数输入支持向量机,对配电网过电压故障进行自动辨识。但该辨识方法的抗噪性较差。
除了对电流、电压暂态特征进行分析,文献[16]提出了时域谱熵的过电压特性识别办法,通过对过电压故障参数临界阈值和辨识,对弧光接地故障进行辨识的算法,文献[17]在此基础上结合阈值与支持向量机进行辨识。实验表明,此类方法能够准确快速的识别弧光接地过电压故障,但时域熵指标偶尔会大于区间限值,需要人为进行判定。文献[18-22]提出了谐波能量归一化方法、稳态频域分析法、暂态频域分析法等多个方法对弧光接地故障进行检测,结论表明奇次谐波对电压波形的畸变有较大的贡献,谐波能量归一化的方法适用于高信噪比系统,对于低信噪比系统,随着高频信号减弱,辨识准确性下降。综上所述,基于波形特征分析的故障检测方法在实现弧光接地的辨识是可行的,但是仍存在噪声影响下辨识准确度不高、基于高维度的辨识训练计算量大等问题,有必要探索有效的波形分析和显著特征提取方法。
为此,本研究针对传统采用零序电流特征分析抗干扰性不强的问题,提出联合零序电压和三相电压波形的时间序列特征分析方法,同时针对传统波形分析特征维度冗余、计算量大的问题,提出了一种基于故障特征降维联合K-means聚类算法的配电网弧光接地辨识方法。首先,利用时域、频域分析法对电压波形进行特征提取,其次,基于变量相关性对特征进行特征降维。基于降维后的特征分布,采用K-means聚类算法对弧光接地故障进行训练,计算得到弧光接地故障与其他故障以及正常波形的辨识边界。最后,通过计算故障波形数据与边界的距离,算法能够准确快速地对弧光接地故障进行辨识。
1 基于故障波形子序列分割的波形特征分析
1.1 波形子序列分割
现场弧光接地故障的数据来源主要是故障录波器的记录数据。故障录波器能够在发生故障时自动记录故障发生时段的各种电气量的变化。如图1所示,故障录波器记录了故障发生前正常运行状态(1.0 s~1.09 s)、弧光接地故障状态(1.09 s~1.88 s)、演变成铁磁谐振故障(1.88 s~2.04 s)以及故障恢复后的三相电压和零序电压波形。如果直接采用故障录波数据进行故障特征分析,则可能会导致故障特征混淆。为此,本研究提出基于滑动T检验的故障子序列分割方法对不同类型故障波形进行分割。滑动t检验通过并非通过检验时间序列的动力学结构变异来检测故障发生,而是计算均值异变是否显著来检验突变的发生[23]。由于故障电压波形存在强周期性,因此滑动t检验参数选择问题变得简单,且参数选定后适用于所有录波器数据。

图1 故障录波器数据
在检验时,t服从自由度为df=n1+n2-2的正态分布。对于长度为n的时间序列X(t),令其基准点为i(n1≤i≤n-n2),基准点前后两段分割序列分别为x1和x2,定义i时刻统计量ti:
(1)

给定显著水平α=0.05,通过查t分布表得到临界值t0.05,若|ti|>tα,则认为在该点发生了故障。
1.2 波形特征分析
1.2.1 时域波形特征
时域分析能够在时域中直观准确地对系统进行分析,特别对于弧光接地系统而言。选取均值、方差、峭度和峰-峰值等时域指标进行分析。均值反映了数据的平均水平和集中程度,方差则用来衡量数据的离散程度,峰-峰值表现出一个周期内的最大值和最小值之间的差异。峭度系数则反映数据分布的尖锐程度,当发生故障时,数据的峭度变化较大。
根据对弧光接地故障、铁磁谐振故障和正常情况进行时域特征提取,得到了3种类型数据的时域特征值,见表1。从表中可以观察到,发生弧光接地故障时,零序电压的方差和峰-峰值明显高于铁磁谐振故障和正常情况,其中弧光接地故障零序电压的方差为273.478,约为其余两种情况的3.15倍和4.99倍。3种情况的电压均值均趋向于0,但正常情况下的三相电压和零序电压的峭度明显低于其余两种故障状态。
1.2.2 频域波形特征
频域分析是一种评价系统性能的方法,它在频域范围内应用图解分析法反映系统的稳态性能和瞬态性能。在对弧光接地系统进行频域分析时,选取频率标准差、奇次谐波、重心频率、和均方根频率作为频域特征指标。
通过对弧光接地故障、铁磁谐振故障和正常情况进行频域特征提取,我们得到了表2中展示的3种情况下的频域特征值。从表中可以看出,铁磁谐振故障状态下各奇次谐波含量都有明显变化,并与弧光接地故障和正常情况有明显的区别。同时,弧光接地故障时,故障相和零序电压的重心频率接近50 Hz,而铁磁谐振故障的重心频率接近25 Hz。

表2 频域波形特征表
2 基于分割-聚类的弧光接地故障辨识算法
2.1 基于K-means聚类分析模型
K-means算法通过计算故障样本之间的距离来判断样本之间的相似性,当两个故障样本的距离很近,则可以将其判定为同一类故障[24]。算法计算步骤如下:
首先需要确定K个聚类中心。
其次从数据样本集D={x1,x2,...xm}中随机选择k个质心向量{μ1,μ2,...,μk}作为初始聚类中心。
然后依次分配数据点。计算第i个故障样本数据xi(i=1,2,...m)与各个聚类中心的距离dij:
(2)
式中:μj是簇的均值向量,将xi划分到距离最短的类中,并更新该类中心Cj,计算表达式为
(3)
最后重复数据点分配和聚类中心更新步骤,直到数据点完全分配完毕,然后进行算法循环迭代。当达到指定的最大迭代次数或者迭代时所有类的数据点不发生变化时停止聚类。
聚类完成后输出各聚类数据值。
2.2 基于波形子序列的分割-聚类的故障辨识算法
结合以上分析,本研究提出了基于电压波形分割-聚类的配电网弧光接地辨识流程见图2,详细步骤如下:

图2 弧光接地故障辨识流程图
第一步:数据输入及故障段分割。
输入故障录波后,需要对每个录波中的故障段进行分割。
第二步:子波形时间序列提取。
第三步:特征值、特征向量提取。
对子波形序列进行时域、频域的特征分析,构造故障特征向量。
第四步:特征降维。
对于第三步提取出得特征值、特征向量维度较高,大部分信息存在冗余,利用主成分分析法对数据进行降维,将原来多维数据降至3维。
第五步:K-means聚类。
利用K-means聚类算法对降维后的三维数据进行聚类分析,本文选取k的值为3,即将数据聚类成3类。
第六步:聚类数据输出。
第七步:故障类别辨识。
2.3 弧光接地故障安全边界模型
安全边界即故障判定的边界条件图形化,在边界内的故障数据点可以准确判定故障类型[25]。对于弧光接地故障安全边界,其中心为聚类后归属为弧光接地的聚类中心,其边界条件依靠极半径和赤道半径,计算公式为
(4)
式中,a为赤道半径,b、c为极半径,max(x)-min(x)为映射到x轴方向的最大最小值之差。y,z同理。
3 算例分析
3.1 实验条件
实验选取的训练样本中:弧光接地故障(包含高阻接地故障)数据748个,铁磁谐振故障数据72个;测试样本中:弧光接地故障(包含高阻接地故障)数据183个,铁磁谐振故障数据22个。如图3所示,图中(a)、(b)、(c)分别为测试样本的集中典型弧光接地故障、铁磁谐振故障以及一般接地故障。

图3 测试样本典型故障图
3.2 波形特征参数分布结果分析
根据1.2节中提出的波形特征分析,对故障特征进行主成分分析法降维,得到了各项特征指标的方差解释率,具体数值详见表3。对于选取的8个时频域特征指标,由方差解释率表可以看出,其中有部分指标之间存在冗余,即方差解释率较小,因此需要在保留数据集主要信息的同时对原数据集矩阵进行降维[26]。
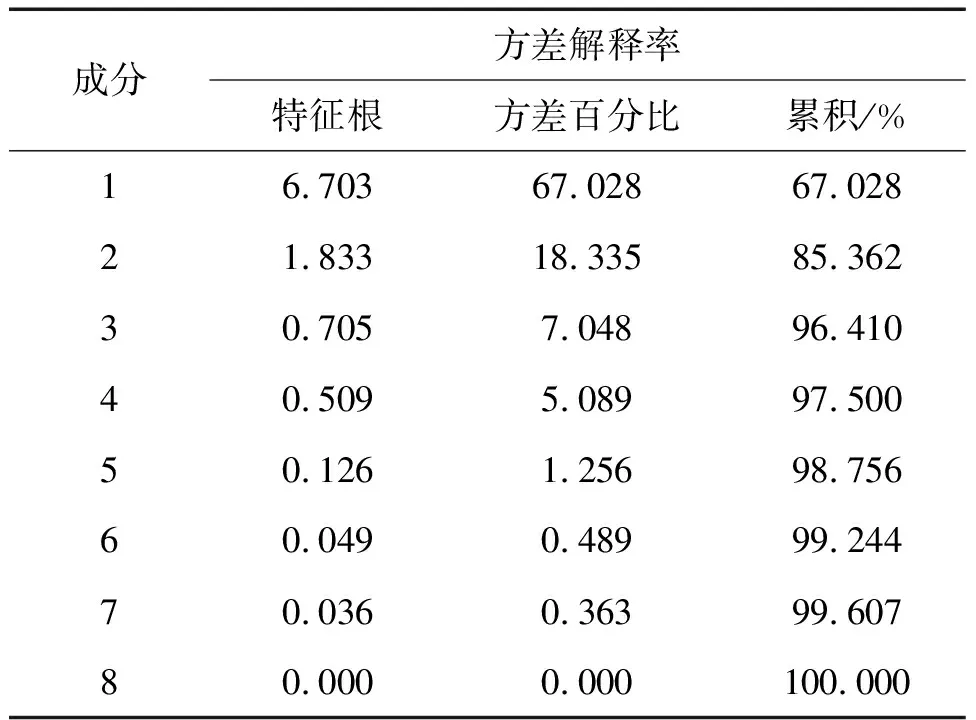
表3 方差解释率表
依据表1所示的累积方差贡献率,前3个主成分的累积解释率为96.410%,因此可以考虑使用3个主成分来表示所有故障特征。表4为特征向量表,表中为标准化后的时频域指标。由表可知,主成分1与频域指标有非常强的正相关性,均在0.9以上;主成分2与方差和均值有较强的正相关性均在0.7以上;主成分3与峭度有较强的负相关,相关性低于-0.6。

表4 特征向量表
3.3 模型辨识验证
1)通过使用模型对测试样本进行辨识后,我们可以得到每个测试样本与各个聚类中心之间的距离和对应的归属类型,具体结果表5。从表中可以观察到,每个样本点总是与其中一个聚类中心的距离较近,并与其他两个类别的样本中心的距离较远。

表5 测试样本与聚类中心距离表
2)结合公式(4)所提出的安全边界,弧光接地故障安全边界的赤道半径分别为114.6和134.1,而极半径为24.3。图4中球形区域为安全边界,散落的故障数据点部分落在安全边界外,此类故障点在故障判别时可能会错误判断为其他类别,而落在安全边界内的数据点则能准确判断为弧光接地故障。

图4 弧光接地安全边界
3)在配电网的弧光接地系统中,高电阻接地故障的辨识一直是一个难题。弧光高阻故障具有明显的间歇性,可以延续几个周期,同时相电压基本保持不变,零序电压发生非线性畸变[27-28]。对于单相接地故障的辨识,主要可以通过检测零序电压来实现,当零序电压突然增大时,可以判断发生了接地故障。而对于弧光高阻接地故障,可以采用本文所提出的辨识方法,得到表6中所示的4种典型故障的3个主成分分量。结合图5的结果可以看出,本研究提出的方法同时将高阻接地和低阻接地均划分为弧光接地故障类型。

表6 四种类型样本降维后主成分分量
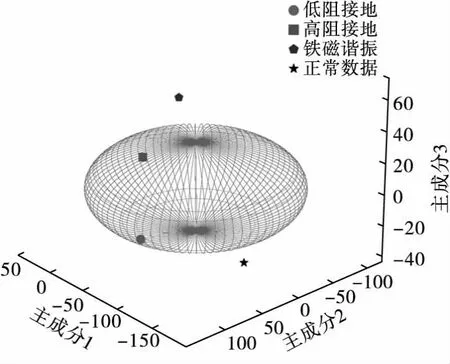
图5 4种典型故障样本的相对位置
3.4 算法比较
故障数据经过分割、特征值提取后,需要对故障类型进行辨识。将提出的算法与希尔伯特变换-卷积神经网络(Hilbert-CNN)、变分模态分解-支持向量机(VMD-SVM)进行比较。其中Hilbert-CNN算法首先构造故障信号的时频谱图,然后将其输入CNN进行故障分类辨识[29]。VMD-SVM算法通过对采集到的零序电流故障信号进行VMD分解,提取故障信号的典型特征并找到贡献最大的排列熵,最后输入SVM进行故障辨识[30]。由表7可以得出,表中所列举的几种算法的辨识准确率均大于90%。本研究所提出的算法模型辨识准确率达96.78%,辨识准确率比分别比Hilbert-CNN、VMD-SVM提升4.31%和5.95%。

表7 不同算法模型的辨识性能
4 结论
本研究针对传统基于电参数和阈值检测在故障特征提取冗余和故障辨识准确性方面存在的问题提出了一种基于电压波形分割-聚类的配电网弧光接地故障辨识方法。首先,针对存在发展性故障的录波器数据,采用滑动t检验对波形子序列进行有效分割。其次,对提取故障波形分割序列的时频域特征,并利用主成分分析法对特征矩阵进行降维处理。然后,进行K-means聚类分析,并利用安全边界模型对算法的辨识准确性进行验证。最后与传统弧光接地故障辨识方法进行比较,得出了以下结论:
1)文中所提出的分割算法对录波文件中的故障进行分割,避免了故障特征混淆。
2)在分割序列时频域特征提取的基础上引入主成分分析法对故障特征降维,解决了传统故障特征提取不足的同时减少了故障特征冗余。
3)文中所提出的辨识方法的准确率相比Hilbert-CNN和VMD-SVM分别提升了4.31%和5.95%。
猜你喜欢
舰船科学技术(2022年22期)2022-12-13
四川电力技术(2021年6期)2022-01-17
浙江电力(2021年10期)2021-11-18
雷达学报(2018年3期)2018-07-18
设备管理与维修(2016年7期)2016-04-23
电测与仪表(2016年12期)2016-04-11
通信电源技术(2016年5期)2016-03-22
火控雷达技术(2016年1期)2016-02-06
电测与仪表(2015年3期)2015-04-09
科技传播(2015年15期)2015-03-25