不依赖模型参数的高速列车鲁棒自适应速度跟踪控制
2024-01-03 04:50徐传芳杨帆张宁李延帅
大连交通大学学报 2023年6期
徐传芳,杨帆,张宁,李延帅
(大连交通大学 自动化与电气工程学院,辽宁 大连 116028)
随着自动化水平以及人们对舒适性、节能性等性能指标要求的提高,列车自动驾驶已经成为高速列车运行控制的必然发展趋势。列车自动驾驶主要包括两大环节:目标速度轨迹曲线的优化计算和对目标轨迹的跟踪控制[1]。在计算得到目标速度优化轨迹曲线的前提下,列车运行控制过程中各项性能指标能否实现,在很大程度上就取决于列车速度跟踪的效果。因此,设计有效的速度跟踪控制器,适时调整牵引力/制动力,实现列车对目标速度曲线的高品质跟踪,具有重要的理论学术意义和工程实用价值。
为了实现列车对目标速度轨迹曲线的高精度跟踪,国内外诸多学者进行了深入研究并提出了各种不同的速度跟踪策略[2-6]。然而,这些速度跟踪策略的设计大都基于列车模型参数部分或全部已知的假设,即所设计的跟踪控制器依赖部分或全部列车模型参数信息。实际上,高速列车在运行中不可避免地会受到若干不确定性因素的影响,比如,旅客的上下车以及所携带行李的变化、天气环境以及线路条件的变化等。这些因素的影响使得列车模型参数很难事先确定,从而导致部分或全部依赖模型参数的控制策略具有一定的局限性,在实际运行中,跟踪效果也会大打折扣。为此,许多学者在采用自适应控制技术估计模型参数的基础上,设计了不需要事先知道模型参数信息的列车轨迹跟踪控制策略[7-9]。Mao等[7]设计了相应的参数自适应更新律在线估计列车质量、基本阻力系数、曲线中心角和坡道坡度,提出了能够实现高速列车执行器故障补偿的速度跟踪控制策略。Yao等[8]在引入自适应更新律在线估计列车质量和基本阻力系数的基础上,提出了基于鲁棒自适应非奇异终端滑模的列车自动驾驶速度跟踪控制策略;徐传芳[9]提出了执行器故障下基于自适应技术的高速列车速度跟踪控制策略,设计了列车质量、基本阻力系数等模型参数的自适应更新律,实现了列车对目标速度和位移的精确跟踪。然而值得注意的是,这些文献所设计的模型参数自适应更新律均为纯积分形式,当存在外界扰动时,会引起参数漂移从而可能导致系统不稳定;而且Mao等[7]和徐传芳[9]在控制器设计过程并未考虑模型参数的时变性,然而在实际运行中,列车模型质量和基本阻力系数等模型参数不但难以确定,而且也会随着乘客的上下车、列车运行环境的变化等因素而时变[10]。
基于以上分析,本文考虑列车模型参数和外界阻力的未知时变不确定性,结合鲁棒控制技术和带σ修正的自适应控制技术,设计了高速列车对目标轨迹的跟踪控制算法,最后对算法的稳定性进行了理论证明,对算法的有效性进行了数值仿真验证。
1 列车运行过程动力学模型
跟列车多质点动力学模型相比,单质点模型更加侧重于列车整体运行状态的描述,常被用来研究列车的速度跟踪控制问题[11]。基于牛顿第二定律,考虑列车质量和基本阻力系数等模型参数时变性的单质点列车运行过程动态特性可描述为[10]:
(1)
(2)

假设1:附加阻力Fw有上界,上界未知,大于零。
假设2:|P|≤T0+T1|v|+T2|v|2,其中T0、T1和T2均大于零,未知。该假设的合理性可参考文献[10]和[13]等,本文不再赘述。
2 控制器设计及稳定性分析
首先给出后文设计控制算法与证明算法稳定性时用到的几个重要引理。
引理1[14]对任意X∈R,Y∈R,如下不等式成立:
(3)
引理2[15]对于变量e∈R和任意常数ε>0,双曲正切函数满足如下不等式:
(4)
引理3[16]对于连续函数V(t)(V(t)≥0),在其初始值V(0)有界的情况下,若同时满足如下不等式:
(5)
式中:如C和D均为大于零的常数,则V(t)有界。
控制目标:针对考虑列车质量和基本阻力系数未知时变并附加阻力的高速列车,基于鲁棒自适应控制技术设计列车速度跟踪控制器,实时调整列车的牵引力/制动力,实现不依赖模型参数和附加阻力具体信息下列车对目标轨迹曲线的精确跟踪。
2.1 鲁棒自适应速度跟踪控制器设计

为了使得所设计的控制器结构更加简单,定义滤波变量s为:
s=e2+αe1
(6)
式中:α>0。在式(6)两边同乘以m,并求s对时间的导数,可得:
(7)
采用鲁棒自适应控制技术,本文设计了不依赖时变模型参数和难以确定附加阻力先验信息的列车轨迹跟踪控制算法:
(8)
(9)

(10)
(11)
(12)
(13)
(14)
(15)
(16)
式中:lm、b0、b1、b2、l0、l1、l2为自适应律系数;σm、c0、c1、c2、q0、q1、q2为修正系数,这些系数的值均大于零。
2.2 稳定性分析
将2.1所提出的鲁棒自适应速度跟踪控制策略总结为定理1。
定理1对式(1)和(2)所描述的高速列车运行过程动力学模型,选择Lyapunov函数:
(17)

证明:求V对时间的导数,并将式(8)代入其中,可得:
(18)
(19)
(20)
将式(10)~式(13)代入式(19),可得:
(21)
由引理1可知,如下不等式成立:
(22)
(23)
将式(22)和式(23)代入式(21)有:
(24)
结合假设2,并将式(14)~式(16)代入式(20),可得到如下不等式:
(25)
(26)
结合引理1并将式(26)代入式(25),有:
(27)
将式(24)和式(27)代入式(18),可得:
(28)

(29)
结合式(29)的解进一步可知:
(30)
所以V(t)是最终有界的,高速列车闭环系统的速度跟踪误差e1和位移跟踪误差e2均半全局一致最终有界。
(31)

(32)
因此,当t→∞时,如下不等式成立
(33)
由式(31)和式(33)易知,当t→∞时e2满足:
(34)
根据上述分析可知,高速列车的跟踪误差e1和e2均半全局一致最终有界。
同时,由式(33)和式(34)可知,通过选择合适的控制器参数,比如固定σm、c0、c1、c2、q0、q1、q2,增加lm、b0、b1、b2、l0、l1、l2,使得α0尽可能地大,则可得到任意小的高速列车跟踪误差。
3 仿真验证与分析
为了验证所提算法在列车跟踪运行控制过程中的有效性,本文搭建了系统的仿真模型并进行了仿真研究。设置仿真中所用列车模型参数的信息如下[8,10]:列车模型参数标称值m=500×103kg;a0=5 880 N;a1=388 N·s·m-1;a2=8 N·s2·m-2。列车模型参数不确定性为:Δm=1 000×rand;Δa0=200×rand;Δa1=30×rand;Δa2=0.2×rand;其中rand是随机产生0~1之间的值。g=9.8 N/kg。仿真中的列车运行附加阻力设置如下:
(38)
式中:o(·)=1 500 sin(0.02vt),为其他阻力;仿真时附加阻力中所包含参数le=1 000 m;ls=200 m;αs=2π/3;θ=π/1800。

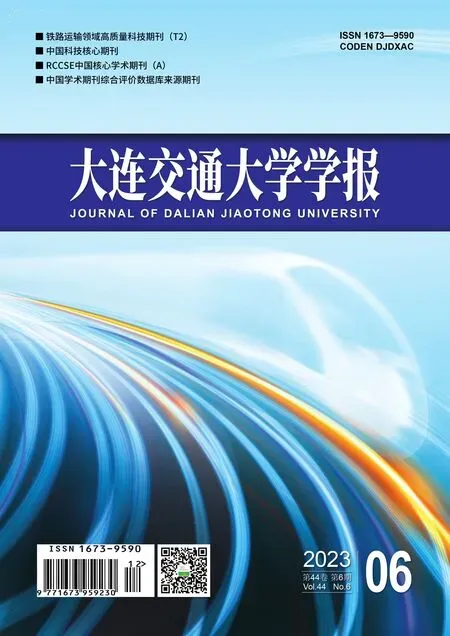
仿真中列车运行所跟踪的目标速度曲线和位移轨迹曲线见图1。列车运行时间为1 500 s,运行距离为62.65 km,运行最高速度为69.5 m/s(约250 km/h),运行过程包含有列车加速、巡航和减速等运行状态。

(a) 目标速度
(b) 目标位移图1 列车目标速度和位移轨迹曲线
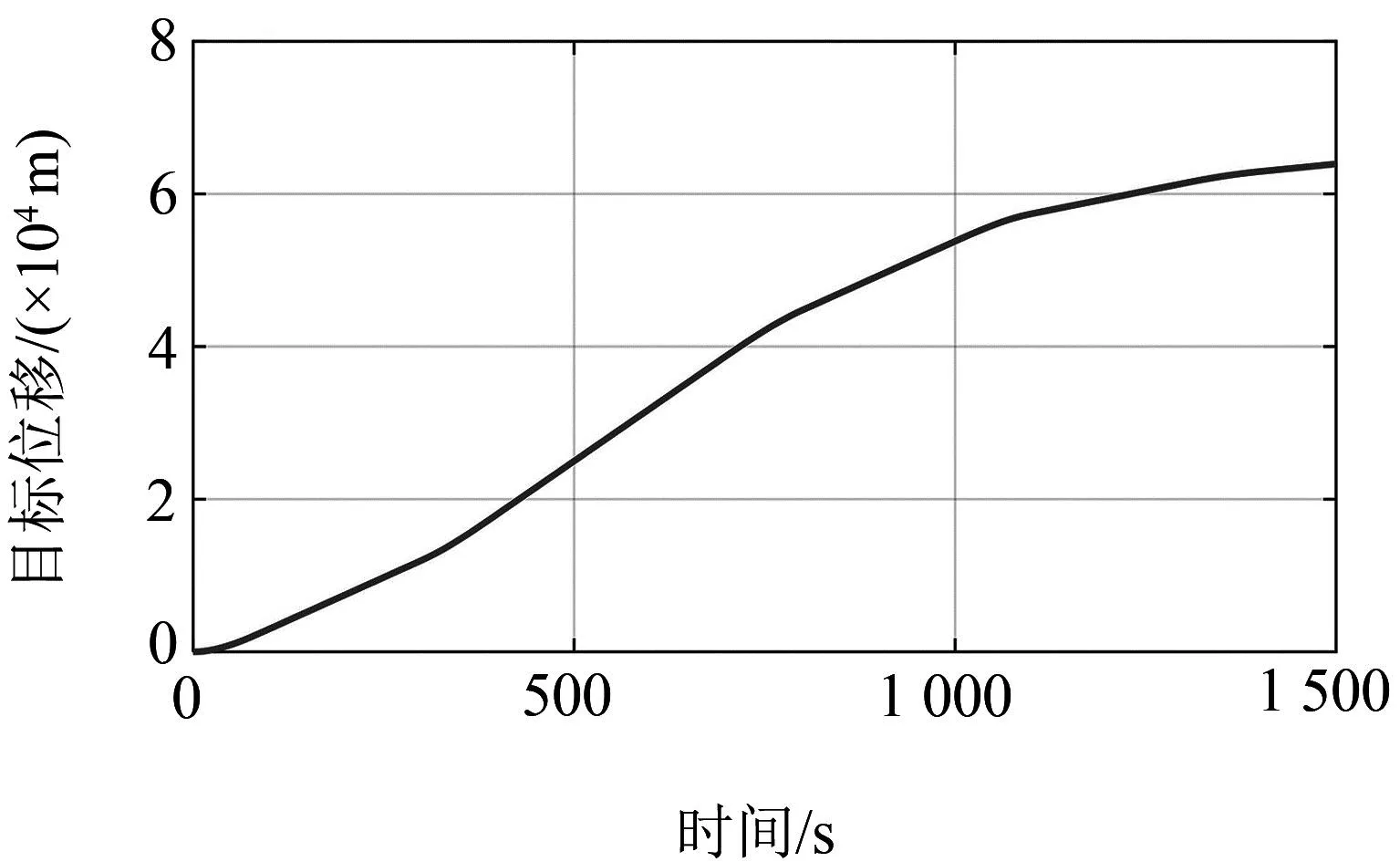
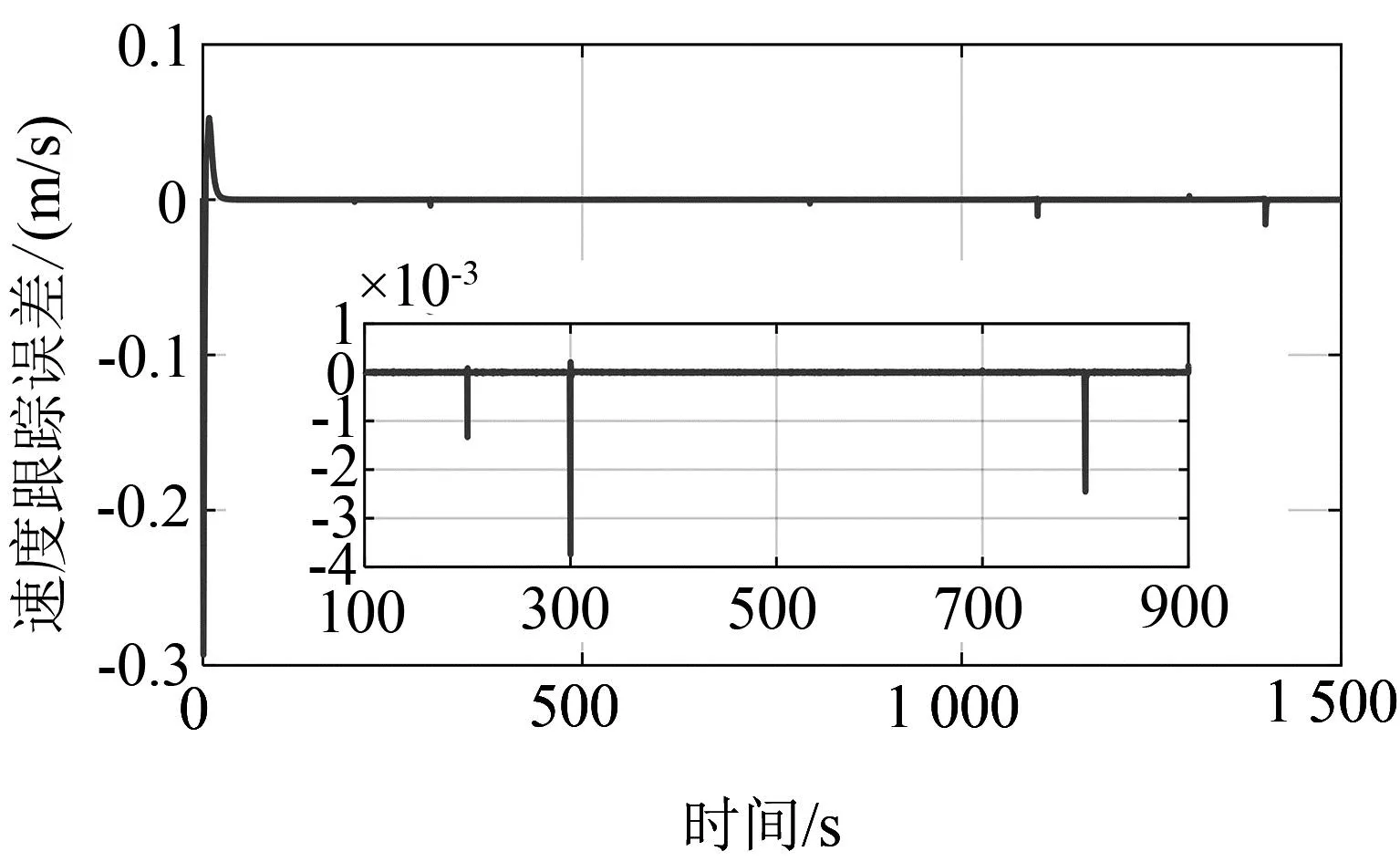
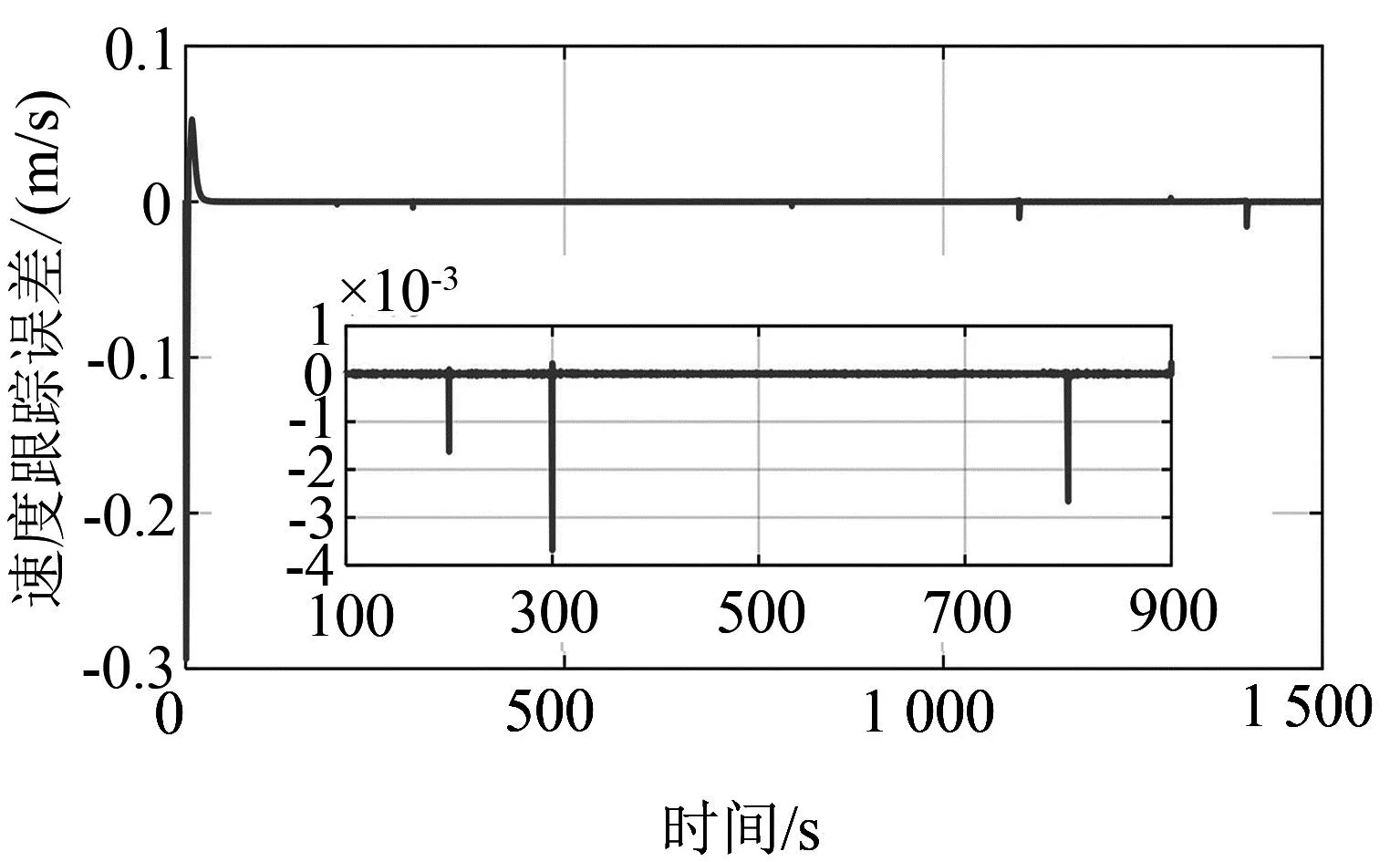
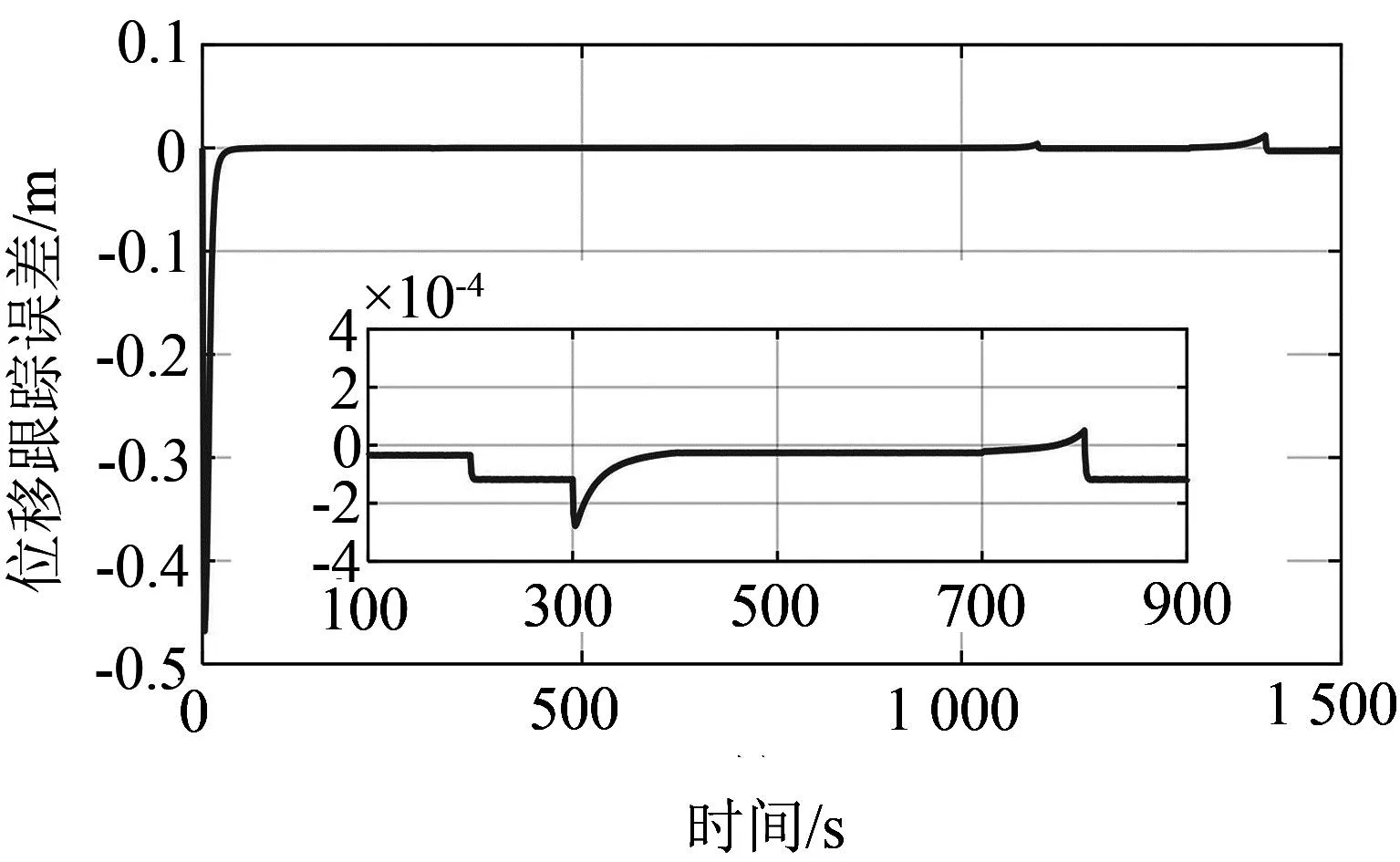
本文基于上述模型参数和控制器参数进行了仿真,仿真结果见图2和图3。图2为列车对目标速度和位移轨迹曲线的跟踪误差(图中小图为跟踪误差的局部放大图),图3为列车的控制输入力。可以看出,尽管受到模型参数时变,附加阻力等不确定性因素的影响,列车在整个运行过程都能通过及时调整牵引力/制动力的大小,及时抵御这些系统不确定性因素的影响,暂态时的误差波动小,稳态时的跟踪误差小,实现了列车对目标曲线的高品质跟踪。
(a) 速度跟踪误差
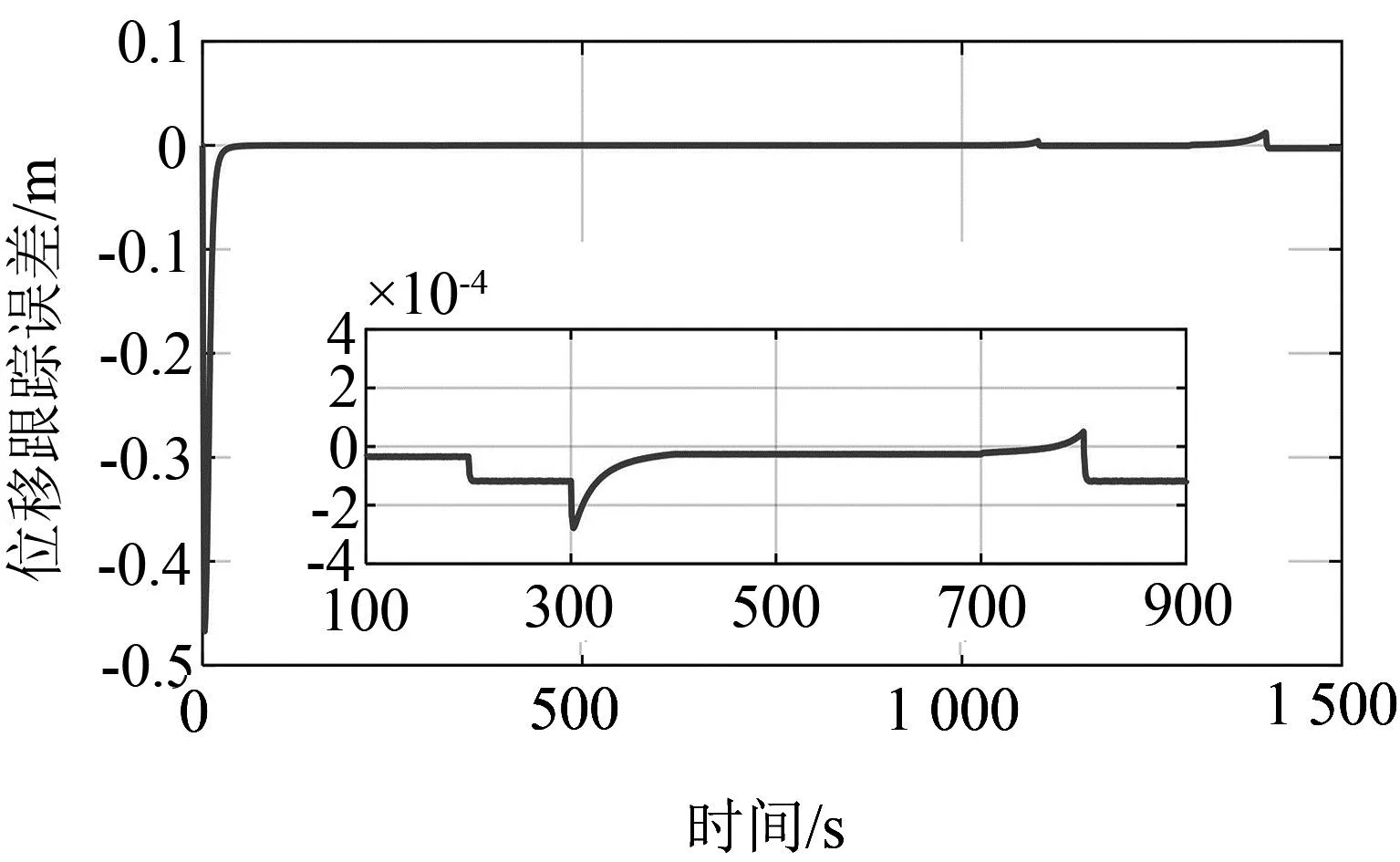
(b) 位移跟踪误差图2 列车跟踪误差
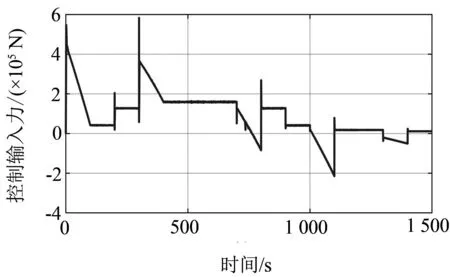
图3 列车控制输入力
为了验证所提出鲁棒自适应速度跟踪控制算法对模型参数和附加阻力等不确定性因素的抵御能力,保持控制器参数设置不变,对模型参数不确定性和附加阻力增大时的情况进行了仿真。设置模型参数不确定性和其他阻力均增加为原来的2倍,坡度角增加为原来的1.2倍,此时的列车跟踪误差和控制输入力仿真结果见图4和图5。可以看出,列车仍然能够及时地调整牵引力/制动力,实现对目标轨迹曲线的良好跟踪,表明所设计的控制算法在抵御模型参数时变以及附加阻力等不确定性因素方面,具有很强的鲁棒性。
(a) 速度跟踪误差
(b) 位移跟踪误差图4 模型参数不确定性和附加阻力增大时的列车跟踪误差

图5 模型参数不确定性和附加阻力增大时的列车控制输入力
4 结论
本文基于考虑模型参数时变不确定和附加阻力等影响的列车运行过程动力学模型,探究了高速列车运行中对目标轨迹曲线的跟踪控制问题。在基于σ修正自适应控制技术设计列车模型参数标称值及系统集总不确定性上界参数更新律的基础上,引入一个鲁棒项补偿系统的集总不确定性,进而设计了高速列车的鲁棒自适应速度跟踪控制算法。所设计的控制算法不需要事先知道模型参数和附加阻力的具体信息。由理论分析可知,若选择的控制器参数满足一定条件且合理,本文所提出的跟踪控制算法可以实现稳态时速度跟踪误差和位移跟踪误差任意小。仿真结果表明,该控制算法实现了高速列车对目标轨迹曲线的良好跟踪,且对模型参数不确定性和附加阻力具有很强的鲁棒性。
猜你喜欢
铁道通信信号(2020年1期)2020-09-21
自动化学报(2019年6期)2019-07-23
制造技术与机床(2017年6期)2018-01-19
自动化学报(2017年4期)2017-06-15
铁道通信信号(2016年8期)2016-06-01
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
中国铁道科学(2015年6期)2015-06-21
电源技术(2015年9期)2015-06-05
浙江大学学报(工学版)(2015年1期)2015-03-01
组合机床与自动化加工技术(2014年12期)2014-03-01