
基于ABAQUS拓扑优化的SCARA机器人大臂优化设计*
2024-01-12 06:07王宁
机械研究与应用 2023年6期
王 宁
(佛山隆深机器人有限公司,广东 佛山 528000)
0 引 言
随着工业自动化的发展,机器人其可代替人工完成大多数重复性工作而应用领域越来越广泛[1]。SCARA机器人由于占地面积小、运动节拍快、工作区域大等特点,在电子、3C、医疗等行业中被广泛运用[2-4]。传统SCARA机器人为保证机器人本体刚性,其结构负载冗余量较大,结构支撑较为厚重,这会导致机器人功耗增加,运动速度降低。此外,最大负载及整体性能也会受到限制,电机、减速机等标准件成本随之增加。而轻量化设计能够有效解决和优化这些问题。这使得轻量化设计在提高机器人性能、降低成本以及减少能量损失方面作用明显。
很多专家及科研机构的研究主要集中在材料替换及结构优化方面。例如Ping等[5]利用ABAQUS和ADAMS软件分析了焊接机器人在极限工况下的应力情况。之后通过ABAQUS软件实现拓扑优化,在性能及精度提升的前提下,实际质量降低了17.9%。孙晨光等[6]利用ANSYS软件对SCARA机器人大臂进行拓扑优化,在大臂外型尺寸固定不变的情况下去除多余部分材料,使其质量降低20%,结构前三阶固有频率提升,结构变形量降低。宋浩等[7]提出了一个6-DOF工业焊接机器人的静态动力学分析和拓扑优化方法,并最终验证了利用相关软件进行结构设计和拓扑优化的可行性。管贻生等[8]提出工业机器人的结构分析和优化设计方法,最终优化后机器人的总静态变形减少78.1%,并且在质量增量只有6%前提下实现五阶固有频率提高49.06%,这意味着在完成拓扑和结构优化的过程中,运用软件工具的方法是有效且可行的。现阶段在工业机器人结构的轻型设计上有了很多突破,但针对SCARA机器人优化研究相对较少。SCARA机器人大臂起到了支撑末端负载、连接小臂与底座的作用。在满足其刚性、抗扭转能力的同时,也要求其尽量轻量化。因此,在保证使用结构功能的情况下,根据受力情况进行有效的步筋支撑以及去除多余材料是主要的设计思路。此外,由于实际的使用工况及生产过程很少被考虑,很多优化模型不能被实际验证[9],也无法获得实际的性能参数。因此,将有限元计算与实际产品相结合是探索未来机械结构设计及应用的有效方法。
笔者主要讨论机器人实际工况下的负载及受力情况,并基于ABAQUS软件对原有模型进行极限工况下的力学分析及模态分析。在保证原有大臂使用性能的前提下对其进行轻量优化,并对优化后模型进行相应的动态分析,最终对优化后产品进行实际产品验证。
1 机器人优化思路及预处理
文中研究的SCARA机器人行程为1 000 mm,机器人总体质量为51 kg,其中一二轴距离及二三轴距离分别为550、450 mm。机器人末端负载10 kg,Z轴上下速度17 m/s,加速度34 m/s2。该机器人为串联机器人,可进行水平和竖直范围运动。机器人结构类似于悬臂梁结构,由底座、大臂、小臂、末端执行器组成,静态条件下底座连接位置的位移绝对固定。其中大臂为主要部件之一,占据机器人三成质量及体积,此零件质量对机器人性能有十分显著的影响。因此,文中选择大臂作为结构优化设计对象。
1.1 机器人结构优化思路
机器人大臂结构优化流程图如图1所示,具体优化步骤如下:①对原模型进行特征简化,以便于划分网格及仿真准备;②导入模型相关参数及外界条件;③对简化后的模型进行力学分析;④基于力学结果对模型进行拓扑优化;⑤根据拓扑优化结果重新设计优化后大臂模型,并进行分析对比及模型调整;⑥若优化后模型没有达到最优解,则再次进行优化。若已达到目的则整个优化过程结束[10]。

图1 拓扑优化流程
1.2 模型预处理
在进行仿真分析之前需要进行结构特征简化,在大臂原始模型上有很多倒角、凹槽等特征,例如大臂的铸造拔模角或金属加工避空、倒角等。这些特征对于大臂的力学性能影响很小,但其存在会降低分析速度及网格质量。因此,可用SolidWorks软件去除不必要特征,输出简化模型后导入ABAQUS软件中,简化后模型如图2所示。采用适用复杂模型计算的C3D10单元进行四面体网格划分,网格密度设置为10,最终网格划分元素为50 438个,共有79 399个节点。
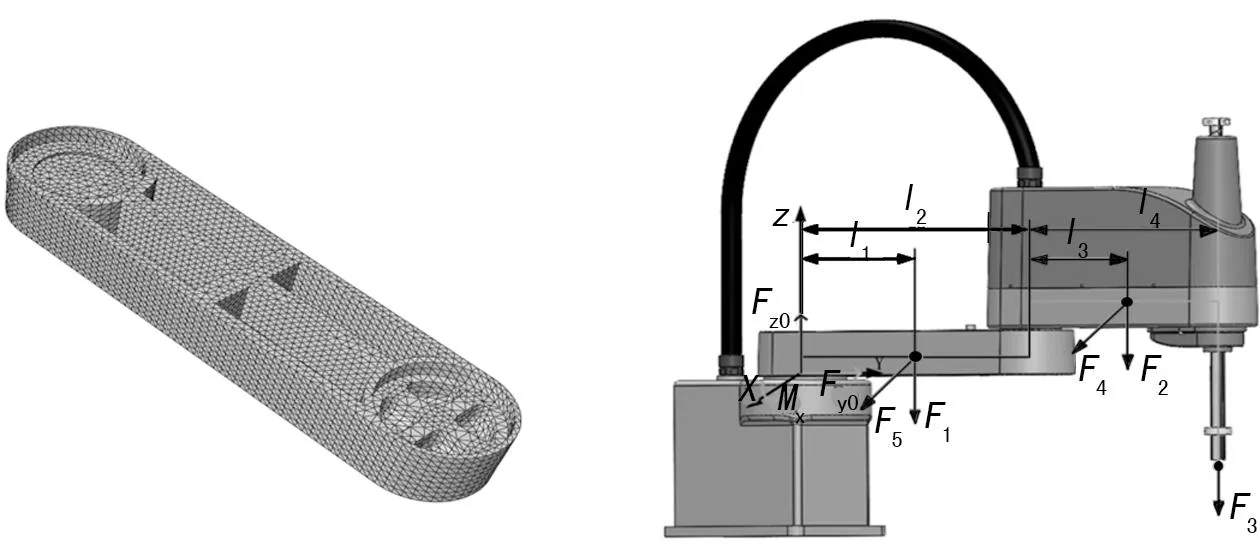
图2 简化模型 图3 SCARA机器人受力分析
1.3 参数确认
SCARA机器人大臂材料为铝合金A356,材料密度2 760 kg/m3,泊松比0.33,弹性模量7.3×e10N/m,屈服强度2.54×108kg/m3,抗拉强度280 MPa,屈服应力180 MPa。
根据机器人质量、载荷可得出:l1=0.29 m,l2=0.55 m,l3=0.225 m,l4=0.49 m,F1=180 N,F2=190 N,F3=440 N;另外一二轴加速度分别为:J1=9.973 m/s2,J2=14.136 m/s2。因此计算可得机器人加速情况下受到的侧向力F4=514.52 N,F5=508.9 N。根据图3受力分布以及机器人本身受力和力矩条件可以得到以下方程:
∑MX(F)=0,∑MY(F)=0,∑MZ(F)=0
(1)
∑FX=0,∑FY=0,∑FZ=0
(2)
FZ0-F1-F2-F3=0
(3)
MX-F1×l1-F2×(l2+l3)-F3×(l2+l4)=0
(4)
2 机器人静力学及模态分析
SCARA机器人整体可看作一种特殊的悬臂梁结构,机器人运行时大臂应力大小及变形量直接影响机器人运动精度,因此使用ABAQUS软件对大臂进行静力学仿真。首先固定大臂末端与减速机连接位置,基于之前的受力分析给大臂输入各方向的受力。静力学仿真后结果如图4所示。由图中可看到,原结构的大臂末端变形向重力方向及机器人水平受力方向偏移,位移最大变形量为0.076 mm。所受应力位置集中在大臂底座连接位置附近,最大应力为44.1 MPa。
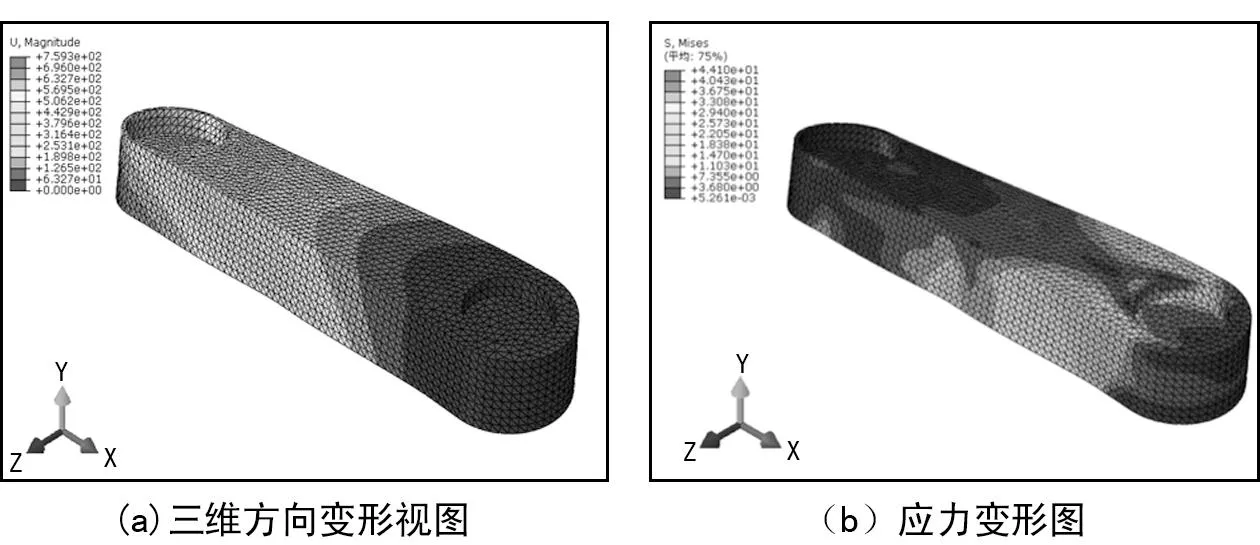
图4 静力学分析结果
基于模态分析的大臂的前四阶振动模型如图5所示。在模态分析的外部条件中取消了外力影响,增加底座连接处的固定约束。由于实际振动幅度较小,因此图片显示使用70倍放大因子。与实际模型比较,大臂一二阶振动时的振动中心在小臂连接处附近,沿Y轴上下振动。三阶振动方向除了沿Y轴振动的同时,还出现了X轴方向的扭转。最大振动中心与一二阶振动一致。四阶振动模式下,小臂连接处及大臂中心均发生了沿Y轴的振动现象。最大位移位置同时出现在大臂中心及小臂连接处。通过模态分析发现,大臂中心位置至小臂连接位置向后抗扭能力较差,可适当调整该部分结构模型,以提高大臂整体刚性。

图5 模态分析结果
基于ABAQUS进行大臂前十二阶模态分析,结果如表1所列。从表中可以看出,除了前三阶频率外,振动频率都高于1 000 Hz,在实际生产使用中并不会产生影响,因此结构优化目的主要是提升前三阶固有频率。

表1 模态分析后的不同振频 /Hz
3 机器人拓扑优化
3.1 优化前设置
设置冻结区域。大臂的两端法兰位置与底座及小臂通过螺栓连接,该位置存在紧密的装配关系,结构位置重要且复杂难以处理,因此大臂两端连接位置设为冻结区域。将冻结区域与优化区域分离,即大臂两端连接区域冻结不进行拓扑优化分析。另外,为获得拓扑优化结构需对优化区域进行填充,非优化冻结区域及优化填充区域如图6所示。
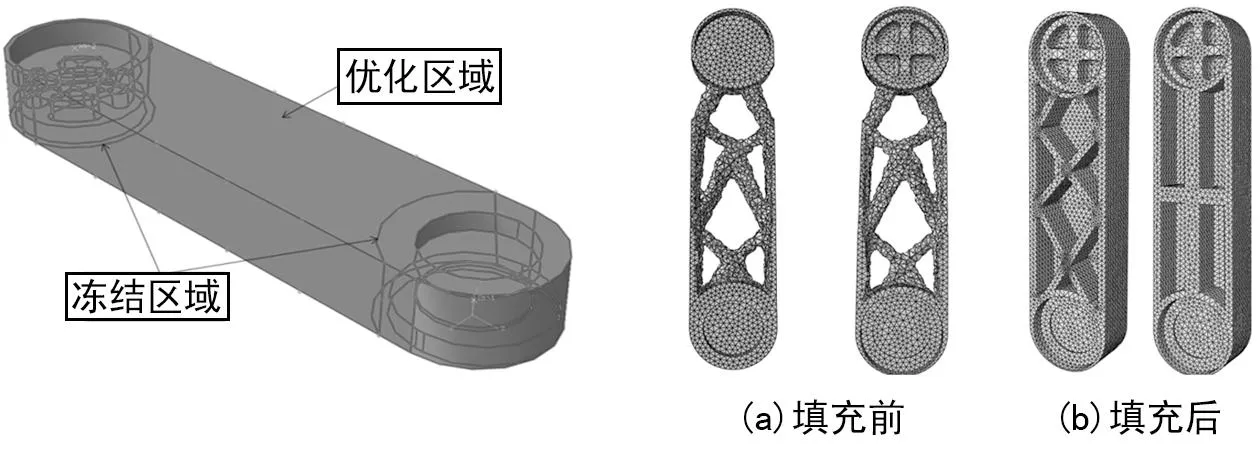
图6 优化与冻结区域划分 图7 拓扑优化结果及模型对比
设置优化参数。材料密度范围:0.001~1;惩罚因子:3;设计响应:总应力,前四阶固有频率、体积;目标函数:最小总应力;约束条件:体积小于填充体积的50%或大于等于前三阶固有频率;约束限制:冻结非设计区域;循环次数:20次迭代循环。
3.2 优化结果展示
优化后模型形状如图7所示。从图7(a)可以看到,拓扑优化后模型中间区域呈交叉网状分布,各孔洞大小不均,且部分区域无法满足实际加工及使用要求,因此需根据优化结果适当调整填充材料以满足实际使用,并填充外壁使大臂模型更加连贯。填充后模型如图7(b)所示。
拓扑优化计算后对大臂中心的筋条布置进行了重新规划。通过优化前后模型比较可以看出,优化后模型采用一些网格支撑筋结构代替了原有直筋设计和厚重的背板支撑。原先内部筋厚度从20 mm减少至15 mm,背板支撑和侧壁的厚度也相对减少。这样在减少大臂质量的同时,增强了机器人大臂的抗扭能力及刚性。
4 优化后结果对比分析
对优化后的大臂重新进行仿真验证,输入优化前相同参数对优化后大臂进行静力学分析与模态分析。若优化后大臂的优化效果不佳,则重新进行模型优化。大臂最终优化后的力学结果如表2所列,大臂受力变形如图8所示。
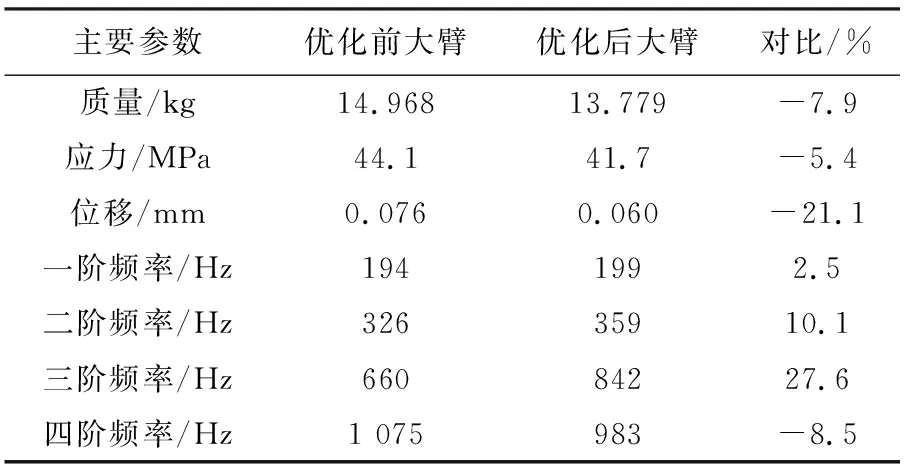
表2 模态分析后的不同振频
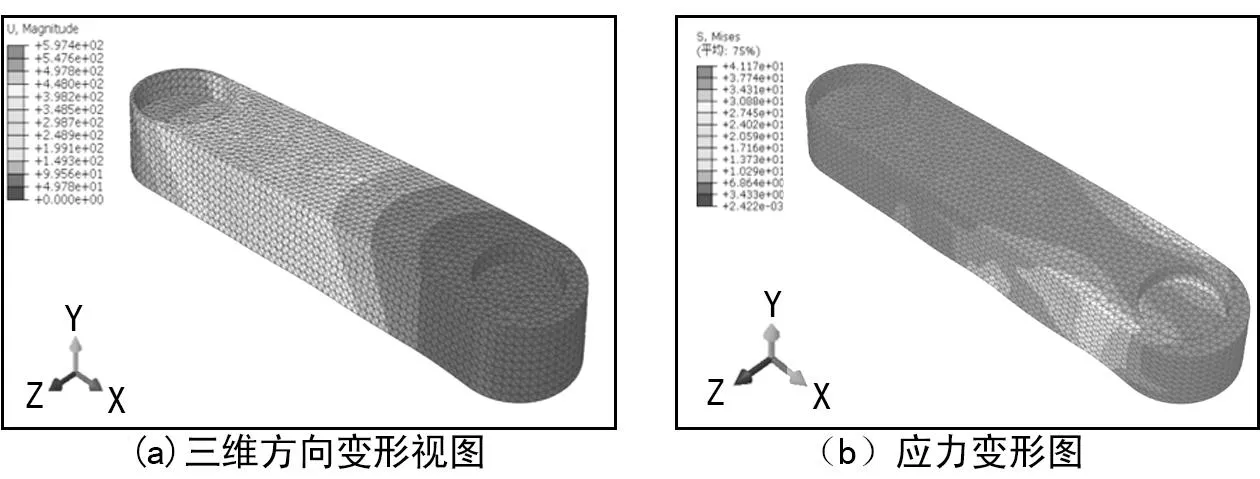
图8 优化后大臂静力学模型
对比发现,优化后大臂与原大臂相比,质量从14.968 kg降低至13.779 kg,同比减少了7.9%(1.189 kg)。模型质量降低能够提高机器人在运行时的性能,减少运动惯量。施加相同载荷后发现,优化后大臂变形量从0.076 mm降低至0.06 mm,变形量减小了21.1%。所受应力也降低了5.4%(2.4 MPa)。观察模态分析发现,机器人大臂的前三阶固有频率均有所增加,增大较为明显的是二三阶固有频率,分别增加了10.1%和27.6%。低阶固有频率提高可降低机器人共振的可能性,使得机器人的整体性能得到改善。
5 结 论
为降低SCARA机器人重量并适当提升机器人产品性能,文中对SCARA机器人大臂进行了轻量化设计分析。得到以下结论。
(1) 通过对机器人载荷情况的分析,确定了机器人大臂相关参数。通过ABAQUS软件的静力学分析及模态分析,确定原大臂最大变形量为0.076 mm,最大应力44.1 MPa。前四阶振动频率分别为194、326、660、1 075 Hz。其中大臂变形量主要在大臂末端与减速器连接位置。为后续结构优化提供数据支持。
(2) 利用ABAQUS软件进行拓扑优化发现,模型中间区域呈交叉网状分布,之后根据拓扑模型对原大臂进行重新设计,最终得到优化后模型。
(3) 对优化后大臂再次分析发现,大臂质量减少了1.189 kg,整体变形量降低21.1%,应力减少5.4%,二三阶固有频率分别提升10.1%和27.6%。大臂各项指标均有所提升,实现了大臂轻量化目的,为后续机器人性能提升提供理论支持。
猜你喜欢
包装与食品机械(2021年5期)2021-11-06
环境技术(2021年4期)2021-09-11
大电机技术(2021年2期)2021-07-21
制造技术与机床(2019年12期)2020-01-06
组合机床与自动化加工技术(2019年5期)2019-05-24
载人航天(2016年4期)2016-12-01
现代机械(2015年1期)2015-01-15
综合智慧能源(2014年1期)2014-09-10
中国神经再生研究(英文版)(2014年23期)2014-06-01
中国工程机械学报(2014年3期)2014-05-25
