
基于车载移动测量系统的高精地图制作
2024-02-24 14:46黄华东李冉马宏阳胡帅朋
资源导刊(信息化测绘) 2024年1期
黄华东 李冉 马宏阳 胡帅朋
(1.中汽创智科技有限公司,江苏 南京 210000;2.中国科学院空天信息创新研究院,北京 海淀 100094;3.南京工业大学,江苏 南京 210000)
1 引言
高精地图(HD Map,High Definition Map)与标准地图(SD Map,Standard Definition Map)有着本质区别。标准地图使用主体是人,主要作用为导航和搜索,数据主体是道路,提供米级道路级别分辨率的道路形状和兴趣点数据。高精地图使用主体是机器,主要作用为辅助定位、超视距感知、先验路径规划和决策,数据主体是车道,提供分米级车道级别分辨率的更为丰富的车道几何和道路设施等数据。高精地图具备位置精度高、要素丰富度高和数据鲜度高等特点[1]。
车载移动测量系统集成了全球导航卫星系统(GNSS,Global Navigation Satellite System)、惯性导航系统(INS,Inertial Navigation System)、激光三维雷达系统(LiDAR,Light Detection And Ranging)、图像传感器(CCD,Charge Coupled Device)、距离传感器(DMI,Distance Measure Instrument)、工控机(IPC,Industrial Personal Computer)等高精度传感器或先进技术,可在高速移动中快速获取高精度位置及姿态信息、高密度三维点云与高清影像数据。车载移动测量系统具备高精度、高效率、数据成果丰富等特点,广泛应用于传统测绘、智慧城市、智慧交通、智能驾驶等领域[2,3]。
国内外已开展基于车载移动测量系统的高精地图制作相关研究与应用,详细介绍了制作部分流程,但未系统性、全局性、标准化研究从外业采集至高精地图应用过程中的主要关键技术、流程与成果[4-11]。本文基于车载移动测量系统,设计一套采集、处理、制图、编译全流程的高精地图制作关键技术及工作模式,实现全流程标准化、部分流程自动化,可快速、准确、高效实现高精地图的采集、处理和建模等工作。
2 总体流程
高精地图制作主要分为4 个一级流程、13 个二级流程及若干三级流程,总体制图流程如图1 所示。外业数据采集主要包括:测区内控制点坐标采集、基准站观测数据采集、流动站数据采集。数据预处理主要包括:组合导航解算、点云数据解算、影像数据解算、数据整理及数据质检。编辑制图主要包括:道路几何及属性制作、对象几何及属性制作、制图成果数据质检、问题批处理解决。地图编译主要包括 :编译格式确定、编译方式选择。

图1 总体流程
3 外业数据采集
3.1 系统介绍
该车载移动测量系统由载体、传感器、供电系统等部分组成,适应于高速与城市道路等应用场景,如图2 所示。IMU 使用天宝Applanix LVX,主、副GNSS 天线使用CSX601A,斜置、平置LiDAR 使用禾赛Pandar XT32,六个Camera 使用海康威视MV-CA050。在高速行驶采集场景(速度大于70 公里/小时),激光线间距不大于3cm,后处理轨迹定位精度优于5cm,点云三维绝对精度优于15cm。

图2 车载移动测量系统
3.2 定位原理
由于系统内部传感器安装过程中存在位置及方向误差,在系统研制后需要对各类传感器的内部参数及不同传感器之间的外部参数进行标定[12]。GNSS 外参为天线至惯导中心的偏移量(Tx、Ty、Tz)和旋转角(Rx、Ry、Rz)等参数,坐标系为地球坐标系(WGS-84)。激光雷达内参包括线束、高度、方位角等参数。激光雷达外参为传感器至惯导中心的偏移量(Tx、Ty、Tz)和旋转角(Rx、Ry、Rz)等参数。坐标系为激光扫描坐标系。DMI 参数为车轮行驶一周的长度。相机内参包括焦距(fx、fy)、主点(cx、cy)、径向畸变(k1、k2、k3、k4、k5)、切向畸变(p1、p2)等参数;相机外参为传感器至惯导中心的偏移量(Tx、Ty、Tz)和旋转角(Rx、Ry、Rz)等参数,坐标系为像素坐标系。
在进行数据处理时,需要将不同传感器坐标系进行转换,转换为WGS-84 大地坐标系或高斯投影后的空间直角坐标系,用于后续编辑制图工作。根据高精地图最终成果要求,选择性地进行不同椭球基准、不同投影方式之间的转换。车载移动测量系统扫描定位原理如图3 所示。

图3 车载移动测量系统扫描定位原理
在KL时刻,车载移动测量系统严密定位方程如公式(1)所示。
公式中:λ为尺度因子,XL为地物点P在LiDAR坐标系中的坐标向量,XW为地物点P在WGS-84 坐标系中的坐标向量。
X IW为IMU 坐标系原点在WGS-84 坐标系中的坐标向量。
RwI为IMU 坐标系至WGS-84 坐标系的旋转矩阵。
其中,(r,p,h)为组合导航解算处理后对应时刻的滚动角、俯仰角和偏航角。
XL I为LiDAR 坐标系原点在IMU 坐标系中的偏移量。
RL I为LiDAR 坐标系与IMU 坐标系之间的旋转矩阵。
3.3 规划与采集
基准站可分为CORS 站、虚拟参考站或自架GNSS接收机三类,针对采集区域大小,需确定基准站数量,根据数据质量等级,可在每10~30km 覆盖范围内设立一座基准站。根据测区路网图,需要现场踏勘,采集路径规划[13],确保采集过程中以最少的重复路线采集较为全面的车道数据,减少数据冗余,提高预处理效率,降低因重复采集导致的点云分层。为检查点云成果绝对精度,需在测区布设控制点,应使用RTK 或全站仪布设高等级平面控制点与高程控制点。
采集过程中应重点注意:( 1 )基准站观测起止时间应覆盖流动站测量时间,确保组合导航解算正常进行。(2)基准站坐标值应布设在控制点上,以提高数据整体精度。( 3 )采集开始前及结束后应对惯导进行静止等初始化操作,以提高惯导数据精度。(4)在隧道、高架下或城市峡谷区域,可增设控制点,用于数据质量评定及提升。(5)在GNSS 信号丢失区域,应尽量匀速、快速驶离,至开阔处重新接收位置信息,减少惯导累计误差。( 6 )应尽量避免流动站周围其他车辆影响,减少因遮挡导致的点云空洞。本次采集实际路线、布设控制点及测区影像底图(部分)如图4 所示。

图4 行车轨迹、控制点与影像底图
4 数据处理及制图
4.1 组合导航解算
POSPac MMS 是天宝Applanix 最新一代的GNSS辅助惯性导航后处理软件。使用POSPac IN-Fusion Single Base 技术对采集POS 原始数据进行组合导航解算,融合北斗、GPS、GLONASS、GALILEO 等全球卫星定位系统,将流动站及基准站采集的数据进行后处理差分动态定位,对GNSS、IMU、DMI 数据进行紧耦合处理,消除GNSS 信号失锁带来的影响,消除IMU 长时间累积误差,实现高精度的定位、定姿及定速。本次采集基线长度在0.5km 至1.6km 之间。基准站与流动站同时接收到的卫星颗数为 :GPS卫星颗数为3~10颗,平均为9 颗;北斗卫星为2~7 颗,平均为6 颗。基准站位置及流动站POS 轨迹如图5 所示。
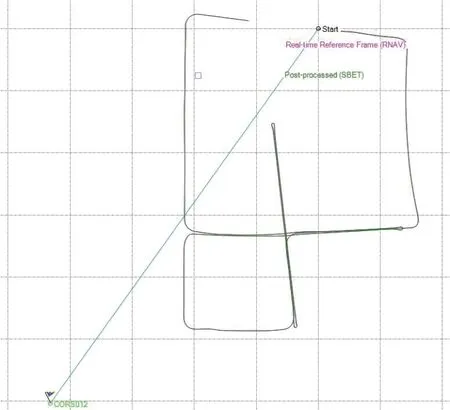
图5 基准站与流动站POS轨迹
处理结束后,生成POST 轨迹文件(sbet_Trace.out),包含时间、坐标、速度分量、滚动角、俯仰角和偏航角等信息。将二进制文件转为Text 格式数据或SpatialLite 数据库文件,进行水平、高程、姿态跳变检查及修复,减少因轨迹跳变导致的点云跳变。对本次处理的POST 数据进行质量评价,北、东方向中误差平均约1.2cm,地/下方向中误差平均约2.8cm,完全符合高精地图制作基础数据的精度要求。三方向中误差分布如图6 所示。
4.2 相片解算
依据POST 轨迹文件、相片至惯导外参,生成六个相机轨迹文件,包含序号、照片名称、时间、经纬度、平面坐标、高程、俯仰角、翻滚角、偏航角等信息。通过相机轨迹文件,将每张照片与点云成果、轨迹成果相匹配,便于后期快速查找、浏览,可将相片像素RGB 值赋于对应点云上,制作真彩色点云成果。解算后相片如图7 所示,自左而右、自上而下相片位置依次为左前视、前视、右前视、左后视、后视、右后视。

图7 各视角相片
4.3 点云解算
点云数据作为高精地图制作的最重要基础数据,点云完整性、准确性决定了高精地图的要素覆盖度与位置精度。原始激光点云数据需经过数据解析、坐标转换(将点云坐标转换为高斯投影后的空间直角坐标)、点云去噪(减少空中噪点)、距离过滤(减少距离或高度阈值外冗余点云)、速度过滤(减少停车时额外采集的冗余点云)、点云自动配准(减少重复采集区域内点云分层或点云重影,提升点云相对精度)、点云手动纠偏(提升点云绝对精度)、地面非地面分割(便于编辑制图点云渲染展示)、点云分类(高精地图自动化制作基础)、数据分幅(按照标准图幅分割为若干单幅数据)、索引创建(快速渲染)等处理,形成下一环节可输入的标准格式数据。解算后的点云成果如图8 所示,自左而右、自上而下依次为整体点云、地面点云、非地面点云。

图8 点云成果
4.4 编辑制图
在通用GIS 平台或专业数据编辑制图平台中,按高精地图数据标准,通过人工、半自动、全自动方式制作高精地图[14-18],包含道路、交通设施等要素,限速、转向、线类型等属性,以及交通灯与停止线、道路参考线与道路边界线等关联关系。制作结束后,应进行值域、拓扑关系、关联关系等内容的自动检查与修复。
地图成果格式为SpatiaLite 数据库,支持开放地理空间协会标准(OGC,Open Geospatial Consortium),可使用ArcGIS、QGIS、FME 等软件编辑。高精地图成果与影像底图叠加展示如图9 所示,高精地图成果与点云成果叠加展示如图10 所示。

图9 高精地图与影像底图

图10 高精地图与点云成果
4.5 精度分析
在车载移动测量作业前后,选取地面或交通设施的拐角点或顶点等明显特征点[19-21],使用全站仪、RTK 测量,获取高精度控制点三维坐标。将点云成果或高精地图成果与控制点进行叠加,如图11 所示。

图11 点云成果与控制点叠加
高精地图成果坐标精度计算如表1 所示,高精地图成果坐标精度统计如表2 所示,误差分布如图12 所示。通过分析可得,平面误差平均值为4.3cm,中误差为2cm,高程误差平均值为3.2cm,中误差为2.5cm,成果数据完全满足高精地图厘米级或分米级要求。

表1 成果坐标精度计算
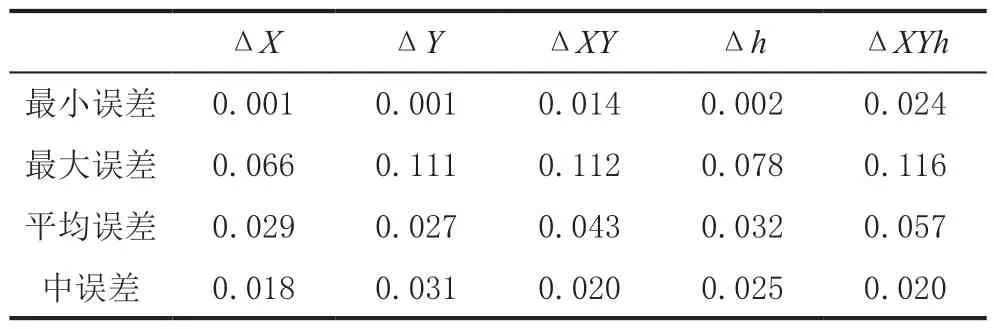
表2 成果坐标精度统计
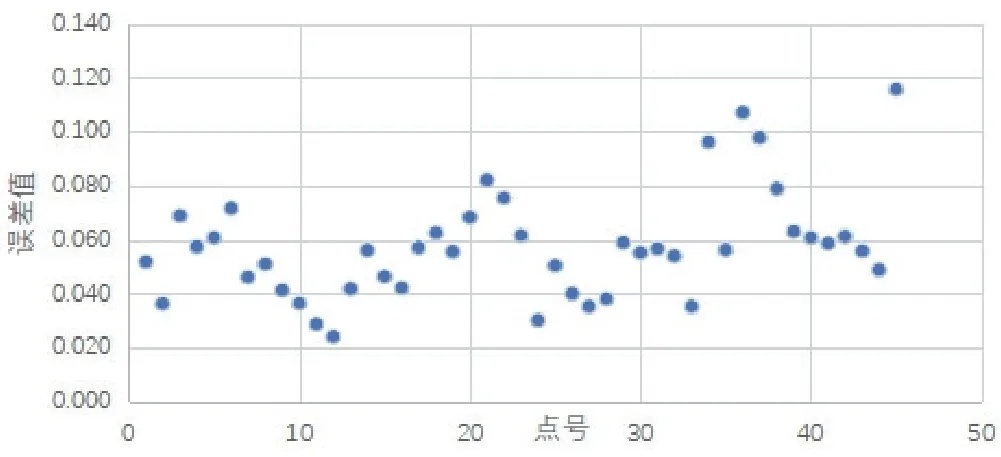
图12 误差值分布
5 地图编译
高精地图的标准格式主要有NDS、OpenDrive、Apollo OpenDrive 等[22]。其中,OpenDrive 是目前国际上比较通用的一种格式规范,描述了驾驶仿真应用所需要的静态道路交通网络,并提供标准交换格式,使用可扩展标记语言(XML)描述道路网络的基础,文件拓展名为xodr,数据涵盖了道路的几何形状,以及可影响路网逻辑的相关特征,例如车道和标志。同时,还能保证不同应用之间在交换数据时的互通性,可以真实模拟车辆在道路上行驶,用于高级辅助驾驶系统(ADAS)功能开发和验证。将SpatiaLite 成果编译为OpenDrive 格式,OpenDrive 格式高精地图可视化效果如图13 所示。

图13 OpenDrive格式高精地图
6 结语
高精地图是保障智能驾驶系统稳定、安全、高效的重要一环,在智能驾驶中起到辅助感知、辅助定位、辅助规划、辅助控制等重要作用。本文通过具体工程实践,详细阐述了基于车载移动测量系统的高精地图制作原理及关键步骤,通过控制点验证,精度完全符合高精地图技术规格要求,将制图成果编译为国际通用标准格式,为不同OEM、Tier1 的智能驾驶开发、测试、仿真提供了标准化信息保障。
猜你喜欢
农村青少年科学探究(2021年11期)2021-02-24
铁道通信信号(2020年8期)2020-02-06
北京航空航天大学学报(2017年4期)2017-11-23
华东师范大学学报(自然科学版)(2017年1期)2017-02-27
中国公共安全(2017年11期)2017-02-06
中国工程咨询(2017年12期)2017-01-31
安徽地质(2016年4期)2016-02-27
电源技术(2015年2期)2015-08-22
中国教育技术装备(2015年10期)2015-03-01
全球定位系统(2015年4期)2015-02-28
