快速反射镜自适应反演PID复合控制系统设计
2024-02-29 14:38艾志伟张慕帆嵇建波柏元忠
红外技术 2024年2期
艾志伟,张慕帆,朱 华,嵇建波,柏元忠
(桂林航天工业学院,广西 桂林 541004)
0 引言
快速反射镜是一种通过控制在光源和接收器之间的反射光线的镜面运动,达到控制光束目的的一种装置,它与大惯量机架结构共同组成复合轴跟踪系统,在光学系统中用来稳定跟踪目标[1]。快速反射镜由镜体、支承结构和驱动器等部分组成,具有谐振频率高、响应速度快、动态滞后误差小等优点,但缺点是工作范围小,它和机架共同作用,能够有效弥补主轴机架系统的不足,而其缺点也可由主轴系统予以补偿,实现大范围的快速高精度跟踪[2]。
快速反射镜的控制一般采用PID 控制器,它的优点是设计简单,对硬件要求没那么高,而且对抑制带宽范围内的窄带和宽带扰动都能较好地抑制,缺点是对扰动的抑制带宽有限[3-4]。因为在实际应用中,受能量限制,采样频率不能做得太高,并且控制器一旦设计完成参数就已经确定,控制系统对不同的扰动适应性较差,这使得单独采用PID 控制具有一定局限性,如对于基座振动引起的扰动,单纯的PID 控制系统就不能对其进行很好地抑制[4]。
系统中存在的扰动可以分为可测量扰动和不可测量扰动[5-6]。可测扰动可以理解为能直接通过传感器如位移传感器、陀螺仪和加速度计等得到测量值,或可以通过状态观测器进行观测的一类扰动。对应于可测扰动的定义,不可测扰动是不可以由传感器直接测得,也无法通过状态观测器进行观测的一类扰动。自适应前馈控制技术对基座振动这类扰动能起到很好的抑制效果[7],但目前的自适应前馈控制技术均需对现有系统进行改造,要求扰动信号可以测量,这也使得硬件方面变得较为复杂。将扰动根据是否可测量进行分类是具有实际意义的:一是这是实际存在的差异;二是在一些情况下能减少成本。由于两种扰动的处理方法不同,导致系统复杂度和控制性能一般也不同,不可测量扰动由于不用对扰动进行测量,减少了传感器的使用,一定程度能降低系统硬件复杂度。而可测量扰动实际上也可以当成不可测量扰动进行处理,在某些情况下,如果用不可测量扰动的抑制方法抑制可测扰动也能取得满意的控制效果,且降低了成本。
本文先用反演设计方法设计自适应控制律[8],对系统进行镇定。由极限思想,把系统承受的不可测扰动近似看成为随时间缓慢变化的量,通过反演控制设计方法可完成整个自适应控制率的设计,此时系统能自动适应不同的扰动量,给出让系统稳定的控制信号,而后结合PID 控制算法对施加自适应控制后的误差信号进行进一步的处理得到一个补偿控制信号,两个控制信号叠加后共同作用在被控对象上,相比单独的PID 控制算法和自适应反演控制算法,自适应反演PID 控制能更好地抑制不可测量扰动。
1 自适应反演前馈控制算法抑制可测扰动
快速反射镜的传递函数是由一个一阶惯性环节和二阶振荡环节串联组成[9-10],其传递函数模型可以表示为:
式中:p1、p2、p3、p4由快速反射镜自身机电特性决定的常系数。应用主导极点法,该三阶系统可以化简为一个二阶系统,将二阶系统转化为微分方程,可以写成如下形式:
式中:θ(t)为反射镜转角位置;u(t)是控制器输出控制律;ξ、ωn、kf是由快速反射镜的机电特性决定的常数。选择反射镜的转角位置θ(t)和转角速度θ˙(t)为状态变量x1和x2,则有:
扰动信号可测时,可考虑采用前馈补偿控制抑制扰动。利用传感器将扰动信号测出,经自适应控制器处理,得到补偿信号,补偿信号与主控制器产生的控制信号进行叠加,得到最终的控制量作用在被控对象上。但单纯的前馈控制系统是开环系统,稳定性很差,难以满足实际工艺要求,所以容易联想在系统增加闭环反馈,构建自适应前馈闭环控制系统抑制扰动。与单纯的反馈控制不同的是,在自适应前馈闭环控制系统中,快速反射镜的实际输出角度测量信号与参考输出角度进行比较得到误差信号不再直接经过控制器产生控制信号,而是与测得的扰动信号一同作为自适应控制器的输入参数,计算输出参数作为快速反射镜的控制信号,若利用反演控制让误差信号能够依据某种原则收敛到零,就构成了自适应反演前馈控制系统,自适应反演前馈系统框图如图1所示。图中,θin是系统输入信号,θout是系统输出信号,θd是扰动信号,e1是跟踪误差信号,由图可得,误差信号e1=θin-θd-x1。
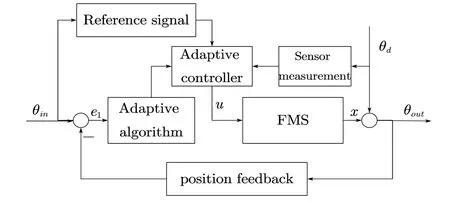
图1 可测扰动自适应前馈反演控制系统框图Fig.1 Block diagram of adaptive feedforward inversion control system for measurable disturbance system
利用反演控制方法求解系统控制量。首先对误差信号e1求微分,有:
李氏函数选择为:
引入虚拟控制量x2d,其值为:
则误差变量为:
将式(7)代入式(5),有:

容易求得:

联立(1)(2)(3)(6)(7)(11)式可得:
整理得到自适应反演前馈控制器输出的控制律为:
2 自适应反演PID 算法抑制不可测量扰动
受可测量扰动抑制方法的启发,对于不可测量扰动抑制,是否也可以基于反演控制方法设反馈控制算法呢?设计的问题难点在于扰动不可测量导致扰动量的一阶微分、二阶微分都无法得到,造成控制量无法得出。为了解决这一问题,不妨假设扰动为缓变量,事实上当系统采样率比较高的时候,这种假设是十分合理的,尤其是对于宽带扰动。根据高等数学中的极限思想,当扰动量为时间的连续函数时,如果时间分割得足够小那么扰动量的变化可以近似看成零。基于这一假设,扰动量的一阶、二阶微分都为零,从而不用进行测量,只需要测量包含扰动信号的输出信号即可,从而也能实现跟踪效果,实现对不可测量扰动的抑制。图2 是不可测扰动自适应反演控制系统框图,图中以期望输出θin作为自适应控制器的参考信号,误差信号e1作为自适应算法输入信号,经过自适应算法改变自适应控制器的参数,自适应控制器输出控制量作用于被控对象。
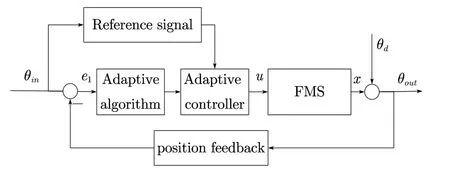
图2 不可测扰动自适应反演控制框图Fig.2 Block diagram of adaptive inversion control for unmeasurable disturbance system
按照可测扰动自适应控制器的设计流程,整理得到不可测量扰动自适应反应控制系统输出控制量为:
由于这里假设扰动量为缓变量,跟实际情况肯定存在差异,扰动频率越高误差会越大,跟踪性能也越差。PID 控制是设计控制系统时最常用的方法,控制器输出为:
式中:kp、ki、kd是PID 控制器的控制参数。PID 控制算法对工作带宽内的扰动具有较好的抑制效果,对带宽外的扰动抑制效果不足,会造成误差信号中可能会存在未被抑制的扰动信号,因此考虑将误差信号经自适应反演算法处理,由自适应控制器输出一个补偿控制信号,用于补偿PID 控制器输出的控制信号,两个控制信号叠加后作用在被控对象上,组成自适应反演PID 控制系统。快速反射镜系统不可测量扰动的自适应反演PID 控制方法如图3所示,系统以期望输出θin作为自适应控制器的参考信号,误差信号e1作为自适应算法输入信号,经过自适应算法改变自适应控制器的参数,自适应控制器输出补偿控制量u1,叠加在PID 控制器的输出控制信号u2中,控制系统不需要对扰动信号进行测量,系统输出控制量为自适应反演控制和PID 控制的输出量之和,表示为:
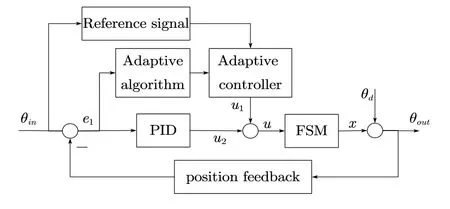
图3 不可测扰动自适应反演PID 控制系统框图Fig.3 Block diagram of adaptive inversion PID control for unmeasurable disturbance system
3 仿真分析
一般认为系统在阶跃输入情况下的工作条件是比较苛刻的,如果阶跃输入下控制系统仍然具有较好的控制性能,说明控制系统能应对最严峻的情况,那么输入信号为其他形式时系统控制性能也能满足要求[11-12]。根据李雅普诺夫稳定原理设计的自适应反演前馈控制系统,搭建了快速反射镜可测扰动控制系统仿真模型。系统输入信号采用阶跃信号,扰动采用正弦信号,得到正弦扰动下的输出响应如图4所示,从图中可以看到,扰动可测时,自适应前馈反演控制系统对可测扰动信号具有较好的抑制能力。
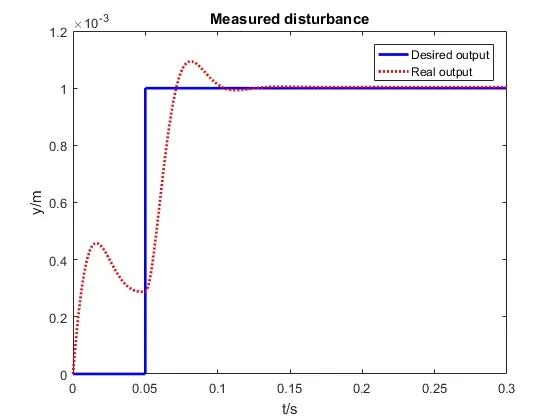
图4 可测扰动自适应反演控制系统输出响应曲线Fig.4 Output response curve of adaptive inversion control for measurable disturbance system
为了测试不可测扰动作用时系统的动态性能,搭建了快速反射镜不可测扰动控制系统仿真模型。因为在采样频率远高于扰动频率时,假设这个扰动信号为缓变量近似,所以在仿真过程中,在系统中涉及扰动信号的量的一阶导和二阶导均设置成了零。为了分析PID 控制、自适应反演控制和自适应反演PID 控制(复合控制)3 种控制算法下的系统性能表现,得到了不可测量扰动抑制系统中无扰动时3 种控制算法的阶跃响应曲线,输入阶跃信号的幅值为0.001 m,采样频率为10000 Hz,响应曲线如图5所示。从图5 中可以直观地看出,与PID 控制系统相比,自适应反演控制系统的输出没有产生过大的超调,也没有过激的振荡,但是动态变化过程也缓慢许多,复合控制系统的动态变化过程介于二者之间。计算得到PID 控制系统的超调量为17.47%,上升时间为1.6 ms;自适应反演控制系统无超调,上升时间为4.5 ms;复合控制系统的超调量为3.41%,上升时间为2.3 ms。可以看到,相较于PID 控制系统,复合系统的超调量下降了80.5%,复合控制系统的平稳性更好;相较于自适应反演控制系统,复合控制系统的上升时间降低了48.9%,自适应反演PID复合控制系统的动态性能综合了两种算法的优势,显示出了更优异的动态性能。

图5 三种控制算法的阶跃响应曲线Fig.5 Output comparison of three control methods
下面对不可测扰动作用时快速反射镜控制系统的性能指标进行测试。输入信号保持不变,扰动信号采用幅值为0.04 mm、频率为4 Hz 的正弦信号,快速反射镜的PID 控制系统、自适应反演控制系统和复合控制系统的输出曲线如图6所示。由图6 输出的响应曲线可以得到扰动作用时PID 控制系统的超调量为17.57%,上升时间为1.6 ms;自适应反演控制系统的无超调量,上升时间为4.8 ms;复合控制系统的超调量3.41%,上升时间为2.3 ms。可以看到,对于低频扰动,3 种控制算法均能较好地抑制,但单纯的PID 控制系统和复合控制系统比单纯的自适应控制系统抑制效果更好。
图6 不可测扰动作用下3 种系统的阶跃响应曲线Fig.6 Step response of three control methods of unmeasurable disturbance system
为了研究扰动作用时3 种控制系统的误差变化情况,得到了3 种控制系统的误差平方曲线,如图7所示。从图7 中可以直观地看到,3 种控制算法均能很快到达稳定状态,稳态误差为零。但相较于其他两种控制系统,复合控制系统到达稳定状态需要的时间更短,且更加平稳。根据误差均方根的计算公式,求得快速反射镜PID 控制系统的误差信号均方根误差为9.1555e-05,自适应反演控制的误差信号的均方根误差为6.8891e-05,复合系统的误差信号均方根误差为5.9728e-05。与PID 控制算法相比,复合控制系统的均方根误差值下降了34.76%,相比自适应控制算法均方根误差值下降了13.3%,复合控制系统的误差抑制效果相比经典PID 控制和自适应控制均有提升。
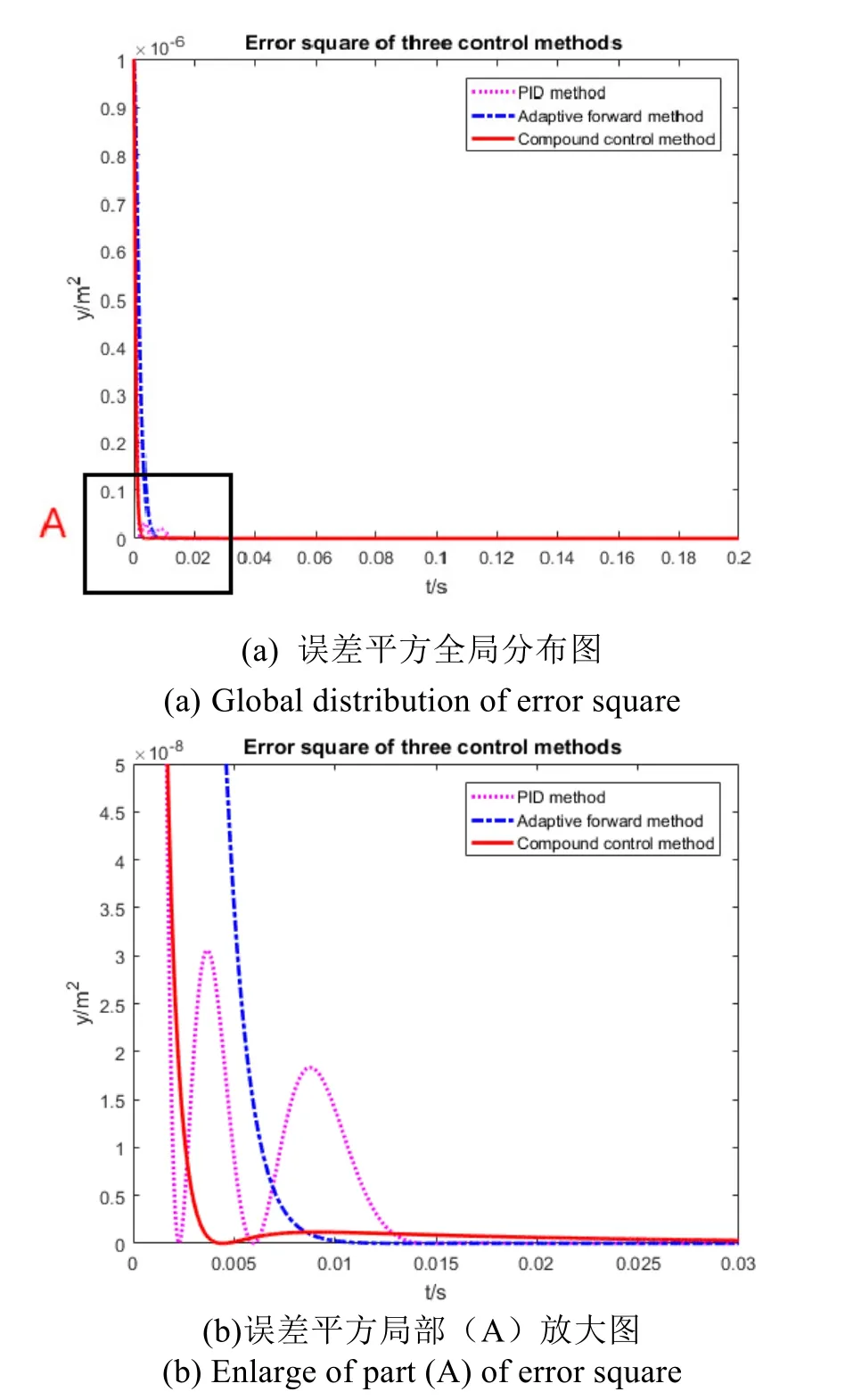
图7 三种控制算法的误差平方曲线Fig.7 Square error curves of three control methods
为了进一步验证控制系统性能,在3 种控制系统分别施加了幅值不变、频率分别为25 Hz,90 Hz,150 Hz 和220 Hz 的正弦扰动信号,各系统的误差曲线如图8所示。从图中可以看到,随着扰动频率的增大,复合控制系统的扰动抑制能力逐渐减弱,且越来越趋近自适应反演控制系统的扰动抑制能力,这种情形的出现主要受到两个因素的影响:一是随着频率的增大,PID 控制的扰动抑制能力越来越弱,在抑制带宽外,对扰动还有放大效果;二是自适应反演控制假设扰动为缓变量,扰动频率越大,越接近采样频率,自适应反演控制对扰动的抑制也越弱。从图8 中还可以看到,复合控制系统对研究频率范围内的扰动信号均具有抑制作用,在中低频段的扰动抑制能力主要受控于PID 控制,抑制效果较好;在中高频段,尽管PID 控制对扰动具有放大作用,但受到自适应反演控制的作用,复合控制系统对扰动还是起到了抑制作用,但扰动抑制能力较弱。
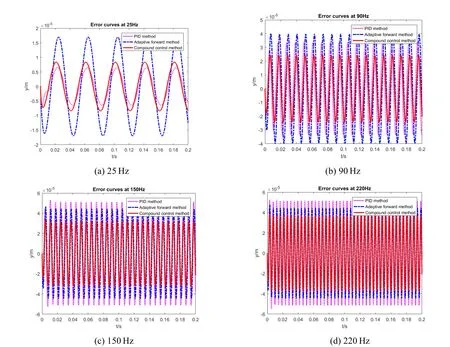
图8 不同频率扰动作用下误差曲线对比Fig.8 Comparison of error signals of control systems under different frequency disturbances
4 结论
本文重点对复合轴精跟踪快速反射镜不可测量扰动的抑制方法做了研究,提出了一种自适应反演PID复合控制算法,当快速反射镜系统受到可测扰动时,用反演控制方法设计了一种自适应前馈反馈控制算法,实现了对可测量扰动的抑制。当快速反射镜系统受到不可测扰动时,受可测量扰动抑制方法的启发,设计了一种自适应控制算法,对不可测量扰动有一定抑制效果,同时与经典PID 控制算法进行了比较,最终设计出了一种结合自适应控制算法和PID 控制算法的复合算法。仿真表明该算法相比经典PID 控制算法和自适应控制算法对不可测量扰动有更好的抑制效果,复合算法比前两种算法对不可测扰动的抑制能力有了较大提高。
猜你喜欢
新能源科技(2022年9期)2022-11-20
数学物理学报(2022年4期)2022-08-22
环境技术(2020年1期)2020-03-06
数学物理学报(2019年4期)2019-10-10
制造技术与机床(2017年6期)2018-01-19
贵州师范学院学报(2016年3期)2016-12-01
光学精密工程(2016年6期)2016-11-07
光学精密工程(2016年1期)2016-11-07
电源技术(2015年11期)2015-08-22
电源技术(2015年9期)2015-06-05