基于预测误差补偿的PMSM预测电流控制*
2024-03-01 00:38李明贤杨小宝曾成碧
组合机床与自动化加工技术 2024年2期
罗 波,周 羽,李明贤,杨小宝,曾成碧
(1.四川大学电气工程学院,成都 610065;2.淄博京科电气有限公司,淄博 255086)
0 引言
随着永磁材料快速发展,永磁同步电机(permanent magnet synchronous motor,PMSM)得到越来越多的应用,而矢量控制[1]和直接转矩控制[2]是电机控制领域最常用的两种控制方法。其中,矢量控制以优秀的稳态性能而闻名,但其控制效果依赖于PI控制器的参数调优;直接转矩控制则是具备突出的动态响应速度,且结构简单,然而较大的转矩脉动限制了它的应用[3-4]。模型预测电流控制(model predictive current control,MPCC)是近年来兴起的一种控制方法,具有结构简单、无调制级、动态响应快的优点。随着这些年数字处理器的快速发展,该方法逐渐成为学者们研究的热点。
传统的MPCC根据电机离散模型预测未来时刻定子电流的可能行为,再通过代价函数从8个基本矢量中选取下个控制周期最优的控制矢量。 因此,传统的MPCC十分依赖于电机模型精度,鲁棒性较差。YOUNG等[5]研究了参数不匹配对预测误差的影响,这种影响是不对称的,当预测模型参数高于实际参数时影响更大。
为解决上述问题,HE等[6]提出了一种修正预测模型MPCC,有效抑制了参数扰动的影响。但该方法不可避免的需要进行复杂的矩阵运算,计算量较大。ZHOU、ZHANG等[7-8]提出了一种基于超局域模型的预测控制方法,提高了系统对电感和磁链的鲁棒性,但对电感参数失配依旧敏感。ZHANG等[9]提出采用扰动观测器补偿由参数失配引起的预测误差。然而,该策略只能对零电压矢量引起的预测误差起到较好的抑制作用,对非零矢量引起的预测误差抑制效果有限。STUMPER等[10]提出一种二自由度控制结构,通过增加扰动补偿的方式提高鲁棒性。然而,该方法是基于上个周期结束时的预测误差实现的,无法分别对每个电压矢量下的预测误差进行精准补偿。为此,SIAMI等[11]提出滚动更新保存每个电压矢量的预测误差,并在预测阶段对每个电压矢量产生的预测误差分别补偿。但是该方案每个控制周期只能更新当前作用矢量的预测误差,无法实时更新每个电压矢量产生的预测误差,预测精度受限于预测误差的更新频率。进一步地,姚绪梁等[12]提出一种改进的更新机制,利用各电压矢量间的数学关系在一个周期内更新所有电压矢量对应的电流预测误差。但该方法更新门槛较高,需要连续两个周期应用不同的电压矢量才能完成电流预测误差的估算。
针对上述问题,本文提出一种电流预测误差更新要求更低的鲁棒模型预测电流控制策略。相比于姚绪梁等[12]提出的方法,改进的鲁棒MPCC控制由于引入滑模观测器和PMSM局部模型,只需要上个周期应用的矢量和采样电流,就能在一个周期内得到八个矢量对应的预测电流误差,避免更新停滞的问题。首先,利用滑模观测器得到局部模型变量,根据局部模型下电流预测误差的特点,计算出各个电压矢量一个周期内的电流变化量;其次,计算预测电流变化量,进一步将两个电流变化量作差,得到电流预测误差;然后,以电流预测误差修正预测模型,提高MPCC鲁棒性;最后,仿真结果验证了本文提出方法的可行性。
1 传统预测电流控制
1.1 PMSM数学模型
在理想条件下,永磁同步电机在dq同步旋转坐标系中的数学模型可以表示为:
(1)
式中:id、iq分别为dq轴系下的定子电流,ud、uq分别为dq轴系下的定子电压,Ld、Lq是dq轴系下的电感,ψf、Rs和ωe分别是永磁体的磁链、定子电阻和转子的电角速度。
1.2 传统的MPCC控制系统
MPCC系统使用离散数学模型来预测未来所有可能的运行状态。因此,通常使用前向欧拉法对永磁同步电机的数学模型进行离散化处理。由于表贴式永磁同步电机d、q轴系下电感相等,因此离散数学模型可表达为:
(2)

(3)
三相两电平逆变器有8个开关状态,分别产生8个电压矢量,其中2个为零矢量,6个为有效电压矢量,如图1所示。
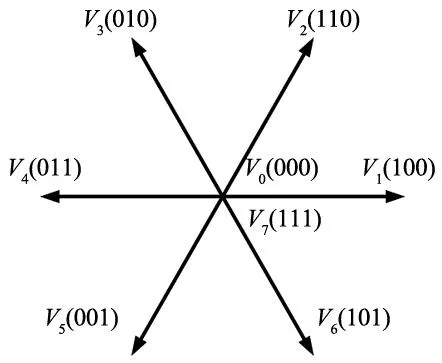
图1 三相两电平逆变器的开关状态
这意味着可以从式(3)中获得下一时刻的八种可能的电流状态。通过最小化目标函数来选择期望控制目标下的最优解。对于MPCC而言,预期的优化目标是电流跟踪性能,因此相应的代价函数为:
(4)
式中:上标*表示参考值。d、q轴的参考电流由PI控制器组成的速度外环计算,如图2所示。由式(4)选择的最佳电压矢量将作用于下一个控制周期。

图2 传统的FCS-MPCC控制框图
2 鲁棒模型预测电流控制
2.1 永磁同步电机的局部模型
电流预测模型式(3)中包含了电机电阻、电感以及磁链参数。这些参数的漂移或者不准确将导致电流预测误差的出现,从而无法得到最优的控制电压矢量,进一步恶化电机控制性能。因此,传统的模型预测控制技术存在鲁棒性差的问题。
为提高预测电流控制的鲁棒性,提出了一种基于PMSM局部模型计算预测电流误差,提高预测电流可靠性的方法。局部模型为:
(5)
式中:Fd=Rsid-Lsωeiq,Fq=Rsiq+Lsωeid+ψfωe。
2.2 电流预测误差计算
基于PMSM局部模型(5)构建电流观测器:
(6)
(7)
式中:a为边界层厚度。式(6)减去式(5)得到电流误差动态方程:
(8)

(9)
由于控制周期T很短,可以近似认为在相邻的几个控制周期内,同一个电压矢量作用下在一个周期中产生的电流变化值相等。因此,电压矢量作用于逆变器一个周期引起的电流变化值表示为:
(10)

(11)

联立式(10)和式(11)得到控制周期(k-1)T内任意电压矢量对应的电流变化:
(12)
一个周期内,各个电压矢量对应的电流变化可以表示为:
(13)

(14)
利用式(14)计算出的电流预测误差将会被分别保存到查找表中,在每个控制周期初始阶段刷新表中数据,并用于对预测电流进行补偿。经过补偿后的预测模型为:
(15)
相应的代价函数则变为:
(16)

3 仿真分析
将改进的鲁棒MPCC在MATLAB/Simulink环境下进行仿真验证。为了进一步体现该方法的鲁棒性,将与传统的MPCC方法进行比较。图3为改进的鲁棒MPCC仿真实验系统结构框图,首先,对电流进行采样并计算电流变化和Fd,q;其次,利用已获得的信息计算其他未更新的电流变化;然后,计算预测电流误差;最后,补偿预测电流,确定下个控制周期最优的控制矢量。被控的PMSM参数如表1所示。

表1 永磁同步电机控制系统的主要参数

图3 鲁棒MPCC控制系统结构框图
图4为参考转速600 r/min,参数匹配时的对比仿真结果。

(a) 传统MPCC
其中,图4a和图4b分别为传统的MPCC和本文提出的鲁棒MPCC仿真波形,在参数匹配时,两者都具备良好的电流跟踪性能,d、q坐标系下的参考电流(见图片右侧三角形标识处)与实际电流重合。此外,本文提出的鲁棒型MPCC相电流THD为6.96%,而精确模型下的传统MPCC方法相电流THD为6.99%,二者相差无几,这表明在参数准确的情况下,本文提出的方法有不输于精确模型MPCC的控制性能。
图5为参考转速600 r/min,参数失配时的对比仿真结果。

(a) 传统MPCC
由于仿真过程中无法改变电机参数,因此采用控制系统参数突变的方式模拟参数失配。在t1、t2以及t3时间段内,预测模型参数分别为2Rs,2Ls和2ψf。从图5a可以看出,当预测模型不准确的时候,传统MPCC方法出现了明显的电流跟踪静差,这个现象在磁链不匹配时尤其明显(t3时间段内)。而电流在电感参数不匹配时会存在更多的纹波,此时相电流THD达到了10.91%。而本文提出的方法则体现出极强的参数鲁棒性,参数不匹配几乎对控制性能没有产生影响,如图5b所示。因此,本文提出的方法相比于传统的MPCC在参数失配时具有更加优秀的控制性能。
为了进一步证明本文提出方法的可靠性,进行了动态性能仿真测试。在0.5 s时,参考转速由200 r/min突变为1000 r/min。从图6可以看到电机转速能够快速的响应参考速度阶跃,并且实际电流能够有效跟踪参考电流,体现出良好的动态性能。

图6 鲁棒MPCC动态性能仿真结果
4 结论
针对传统的MPCC鲁棒性较差的问题,本文提出了一种基于电流预测误差补偿的鲁棒MPCC控制策略。通过滑模观测器得到PMSM局部模型变量,然后在此基础上计算电流预测误差,最后进行相应的补偿。该方法只需要上个周期的电压和电流信息就能在一个控制周期内得到8个矢量对应的预测误差,有效的提高了传统MPCC方法的鲁棒性。仿真实验表明:
(1)模型准确时,本文提出的方法控制性能与传统MPCC方法相当,都具有良好的电流跟踪能力。
(2)参数失配时,传统方法存在跟踪静差和电流纹波增大的问题。本文提出的方法几乎不会受到参数扰动的影响,控制性能明显优于传统MPCC方法。
(3)提出的鲁棒MPCC具有良好的动态响应性能,能够保证速度阶跃过程的电流跟踪。
猜你喜欢
中学生数理化·高一版(2021年11期)2021-09-05
哈尔滨轴承(2020年2期)2020-11-06
今日中国·法文版(2020年7期)2020-07-04
农业机械学报(2020年2期)2020-03-09
中华建设(2019年7期)2019-08-27
中国特种设备安全(2019年1期)2019-03-13
项目管理技术(2016年12期)2016-06-15
现代防御技术(2016年1期)2016-06-01
西南交通大学学报(2016年6期)2016-05-04
新高考·高一物理(2016年1期)2016-03-05