
圆盘形零件的机器视觉检测技术研究
2024-03-04 02:24李宝峰
中国新技术新产品 2024年1期
李宝峰
(中国航发沈阳黎明航空发动机有限责任公司,辽宁 沈阳 110041)
机器视觉在机械零件缺陷自动识别中的应用本质上属于模式识别技术,可根据机器视觉的各种算法,如区域分割、轮廓提取和边缘检测获取机械零件和缺陷部位的特征,再与数据库中参考图像的相应特征进行对比,进而判定出机械零件是否存在缺陷和何种缺陷[1]。可见,基于机器视觉的机械零件缺陷识别在很大程度上依赖于机器视觉相关特征提取方法的准确性。随着该方法不断发展,基于单一特征的检测方法暴露出检测精度不高和鲁棒性较低的问题[2],因此产生了基于BP 神经网络的多特征训练学习的分类方法。随着基于机器视觉的机械零件缺陷分类方法不断发展,各种分类器的手段日益丰富,常见的分类器有BP 分类器、LR 分类器、DT 分类器、RF 分类器、SVM 分类器、CNN 分类器以及KNN 分类器等[3]。对于不同缺陷表现出来的机器视觉特征,不同分类器会表现出不同性能。本文将构建多分类器融合的机械零件缺陷识别方法。本文方法同时使用多种分类器被,将不同机器视觉方法获得的缺陷特征纳入多种分类器,对缺陷类型进行融合判断。本文方法在机械零件缺陷的识别中具有较高的准确率和较好的鲁棒性。
1 基于形态学的机械零件图像增强
本文采用了基于形态学的增强方法,并进行了改进处理。一般的形态学分割方法使用单一的结构元素,处理过程相对简单,处理结果很难同时满足多项指标要求。例如,使用圆形结构元素时,背景去除量大,但是一些边缘细节特征会被圆形模板的形态学处理消除掉;使用线形结构元素时,原始图像的边缘细节特征得以清晰保留,但是背景去除量小。
为此,本文考虑改进一般形态学处理方法,同时结合多种不同结构元素完成开闭运算等形态学处理,以取得更理想的效果。
在具体的计算机二进制数据中,圆形结构元素和线形结构元素的模板形式如图1所示。
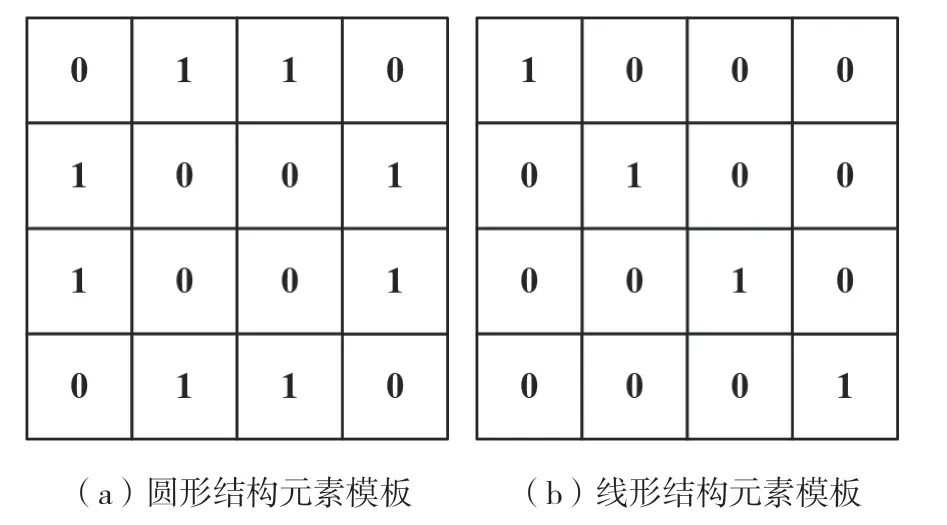
图1 不同结构元素的模板
图1 中给出了2 个同为4×4 的结构元素模板,一个是圆形的,一个是线形的,结合2 种模板进行形态学处理的执行步骤如下。
首先,利用圆形的结构元素对原始图像执行开运算处理。圆形结构元素用S1表示,原始图像用f(x)表示,处理结果用A表示,处理过程如公式(1)所示。
其次,使用线形的结构元素对原始图像执行闭运算处理。线形结构元素用S2表示,原始图像用f(x)表示,处理结果用B表示,处理过程如公式(2)所示。
再次,利用原始图像和上述2 步处理结果分别做差,得到的结果分别用A1和B1表示,处理过程如公式(3)所示。
最后,将上一步得到的2 个处理结果再做差集运算,即可得到最终的去除背景的分割结果,如公式(4)所示。
为了验证改进形态学分割方法的有效性,本文选取齿轮和轴的零件图像分别进行试验,同时采用线形结构元素和圆形结构元素,按照改进方法的步骤进行分割处理,得到的结果如图2所示。

图2 改进形态学的增强结果
本文改进后的形态学处理结果如图2所示(同时使用了线形结构元素和圆形结构元素)。从处理结果可以看出,当结构元素的尺寸为10 时,背景被明显剪除了。当结构元素的尺寸为20 时,背景元素完全被剪除,清晰地显示出目标区域,充分表明本文改进措施的有效性。结构元素尺寸为20 也是后续处理中采用的参数。
2 机械零件图像的特征提取
根据机械零件图像的原理和特点,本文将小波变化和Ostu 域值分割结合起来,构建了一种全新的图像特征提取方法。在小波变换的各级分辨率图像上可以分别获得高频信息和低频信息。其中,高频信息包括图像的细节和噪声,低频信息包括图像的轮廓。传统的Ostu 分割是在原始图像上进行分割,如果将该过程在小波变换的低频成分上进行,就可以避免噪声和其他干扰性细节的影响。
设x(t)代表可积函数,那么x(t)有关其Fourier 变换φ(w)的连续小波可以定义为如公式(5)的形式。
基于此,小波反变换如公式(6)所示。
式中:a表示小波变换的尺度;b表示小波变换的位移。
其中φab(t)如公式(7)所示。
与一维Ostu 法相比,二维Ostu 法增加了邻域平均灰度,从而将一维灰度直方图扩展为二维灰度直方图,即正常的图像灰度和邻域平均灰度同时出现的概率。其基本操作过程如下:用f表示原始图像,假设其灰度等级为L(0,1,…,L-1),整幅图像的像素总数为N,邻域平均灰度等级为L。进一步用i表示一个像素的灰度等级,用j表示像素对应的领域平均灰度等级,那么可以计算其联合概率密度,如公式(8)所示。
二维Ostu 法比一维Ostu 法的处理精度高,因此本文选择小波变化结合二维Ostu 法进行机械零件特征提取,提取效果如图3所示。
从图3 可以看出,原始图像中机械零件上出现了带状缺陷,小波结合二维Ostu 分割有效地提取了该部分特征。
3 试验结果与分析
按照本文提出的多分类器融合的机械零件缺陷识别方法进行试验研究。根据缺陷识别的常见分类算法,本文将KNN 分类器、DT 分类器、SVM 分类器、NB 分类器、BP 分类器、LR 分类器、Adaboost 分类器、RF 分类器、GBDT 分类器以及XGBT 分类器作为候选分类器。参与分类的机械零件的缺陷类别包括点状缺陷、多点缺陷、孔洞缺陷、多孔缺陷、线状缺陷、多线缺陷和带状缺陷。根据机器视觉方法对这7 类缺陷进行增强处理和特征提取后,纳入各分类器进行缺陷识别分类。10 种分类器对7 类缺陷的分类识别准确率见表1。
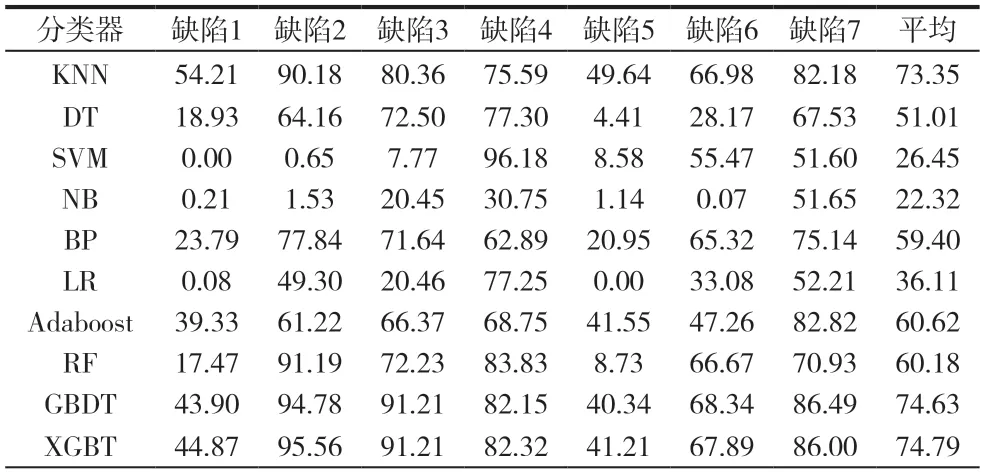
表1 各分类器对不同缺陷的识别准确率
从表1 可以看出,不同分类器对不同缺陷的识别效果有所不同。从7 类缺陷的平均识别率来看,KNN 分类器、GBDT分类器和XGBT 分类器的识别准确率最高。为了进一步提升缺陷识别的准确率和鲁棒性,将10 类分类器按照3 个一组随机组合,分别纳入第2 节的框架,形成融合分类器。最后得到排名最靠前的3 组组合,见表2。

表2 融合效果最好的3 组分类器
从表2 可以看出,3 组最好的融合模型中都有XGBT分类器和KNN 分类器,与这2 类分类器的效果最好有关。XGBT+KNN+RF 分类器的融合在缺陷识别精度和召回率方面均取得了最好的结果。本文进一步给出上述3 组分类器融合模型对7 类机械零件缺陷的识别准确率对比,结果见表3。

表3 3 组融合分类器模型对7 类机械零件缺陷的识别准确率(%)
4 结论
针对机械零件缺陷的自动识别和分类问题,本文构建了一种基于机器视觉和多分类器融合的方法。在该方法中,多种不同的分类器被融合在一起,形成对机械零件缺陷的融合判别结果。每个分类器对缺陷的判别来自机器视觉获取的图像特征。本文采用多元素结构的改进形态学方法进行图像增强处理,以提升机械零件图像的对比度。并进一步采用小波变化结合二维Ostu 分割的方法获取机械零件图像的特征,作为分类器的输入。在试验过程中,针对7 类机械零件缺陷采用10 类分类器进行缺陷识别。测试显示,XGBT+KNN+RF、XGBT+KNN+NB、XGBT+KNN+SVM 这3 组分类器的融合识别效果最好。其中,XGBT+KNN+RF 融合分类器不仅识别准确率高,而且对7 类机械零件缺陷均具有较好的鲁棒性。今后的研究工作中将进一步测试其他分类器组合对机械零件缺陷识别的实际应用效果。同时,在确保识别准确率的基础上进一步提升识别速度也是今后的研究重点。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
高技术通讯(2021年3期)2021-06-09
电子测试(2018年1期)2018-04-18
自动化学报(2017年5期)2017-05-14
光学精密工程(2016年4期)2016-11-07
光学精密工程(2016年3期)2016-11-07
光学精密工程(2016年1期)2016-11-07
中国继续医学教育(2015年2期)2016-01-06
电测与仪表(2014年15期)2014-04-04
振动、测试与诊断(2014年6期)2014-03-01
