面向空调管路布置的空间向量搜索算法
2024-03-04 11:34唐景春卢剑伟任远凯
合肥工业大学学报(自然科学版) 2024年2期
唐景春, 刘 逸, 卢剑伟, 任远凯, 黄 克
(1.合肥工业大学 汽车与交通工程学院,安徽 合肥 230009; 2.合肥工业大学 机械工程学院,安徽 合肥 230009)
空调压缩机管路是传输冷媒的重要结构,对整机的可靠性影响很大,因此管路布局设计是空调研发中重要工作内容之一。目前主要依赖人工布置,需要经验丰富的工程师,提高了人力成本且制约了研发。已有部分学者围绕船舶及航空发动机等管路布置开展了一些研究,但不同机械设备对管路的布置规则和要求不尽相同。而关于空调设备压缩机管路系统的自动布管研究较少。
对于航空发动机、船舶等管路,一些学者采用确定性的算法。文献[1]运用单元生成法;文献[2]提出构建带有权值的算法。另有学者采用不同算法进行组合,文献[3]采用基于Sting聚类算法的自适应栅格法生成不同栅格粒度,减小潜艇空间管系布局中的计算量;文献[4]组合了快速随机树算法及模拟退火算法。随着非确定性算法的发展,有学者将其用于管路的布置。文献[5]利用混沌方程的伪随机性对管路进行优化;文献[6]针对多条管路提出协进化的遗传算法;文献[7-8]对遗传算法进行改进,用于管路布置;文献[9]介绍了其他的管路布置算法。这些对空调管路布置提供了一些参考,但未考虑到空调压缩机管路的特殊构型要求。空调管路以动力学性能为目标,多数经验性的要求难以量化为管路的优化指标,使得优化算法无法适用于空调管路布置。
鉴于空调管路布置的一些特殊要求,本文运用文献[10]中空间网格化方法处理空调布管空间,以逃逸法为基础对算法的搜索方式进行改进,以满足空调管路构型要求,得到符合要求的管路路径,而不局限于寻找全局意义上的最优解。
1 空调管路布局问题描述
传统的管路布置方法都是以最短路径或最少材料消耗作为目标进行管路方案规划,因此可以归为复杂环境中最短路径问题[11]。空调管路虽然管路数目不多、总长度不长,但工作过程中需要承受压缩机传递的机械振动,传统的管路布置方法已不再适用于空调管路布置。考虑到加工装配及动力学性能,空调管路在弯曲半径、直线段长度、折弯角度、管路构型等方面均有严格要求。
本文以空调管路布置规范要求的弯曲半径、折弯角度、最小直线段长度等一些工艺及装配要求为约束条件,以管路构型要求为目标对管路问题进行数学描述:
1) 障碍物约束。空调机箱内的一些结构件、电器组件等限制了管路的布置空间。管路布置必须绕开障碍物,与障碍物保持一定距离,使管路在空调运行过程中不因变形与其他结构干涉。
2) 加工约束。由于加工方面的限制,管路的一些结构参数受到一定的约束,在管路布置过程中须考虑这些约束。例如,管路的最小直线段长度须大于一定数值,不同管路的折弯半径须按规定设计。
3) 装配约束。不合理的设计可能导致管路安装过程中耗时费力。例如,四通阀不应放置在压缩机与储液筒正上方。
4) 流动约束。管路设计尽量要减小管内流体对管路的冲击,以减小管路振动或疲劳损坏。例如,与管口相接的一段管路必须与管口方向一致且不小于一定长度;在管路折弯时尽量避免钝角弯位。
空调的不同管路有各自的构型方面要求,主要包括:
1) 排气管易受高压气体的冲击,需减振U型弯位,但U型弯位不应太多;弯折尽量少,且避免钝角弯位;管路水平俯视图应围绕压缩机圆周方向[12]。
2) 回气管口处振动较大,应设置U型弯位,且一般U型臂长度大于排气管U型臂;俯视图中管路环绕压缩机,对应圆心角大于90°。
3) 低压阀接管与冷凝器接管振动较小,在满足折弯角度约束与空间约束的情况下,寻求较短的路径。
复杂构型要求规定大致符合减振要求的管路构型,但这类要求难以用目标函数进行量化来寻优。因此,本文将这些构型要求作为管路布局的目标,以空间向量搜索的方式来实现。将管路布局问题转化为在上述约束条件下找到符合一定构型管路的问题。
2 管路系统数字化建模
为了实现对管路的自动布局与优化,需要对管路系统进行数字化处理,主要包含布置空间建模、碰撞检测等。采用空间网格化的方法[10]对管路布置空间进行建模。在此基础上,提出相应的碰撞检测方法。
2.1 管路布置空间建模
为了将障碍物标记以区分可行空间与不可行空间,降低问题的复杂度减小运算量[5],须将空间进行离散化并进行数字化表达。本文采用网格对管路布置空间进行表达。空调压缩机管路布置空间狭小、形状复杂且障碍物形状不规则。不仅网格精度影响障碍物标记准确性,而且对于不同类型的管路其可行空间有所差别。针对上述问题,对于不同管路的半径采取不同精度网格进行运算。
将布管空间离散为均匀的长方体单元格。建立1个三维数组A。i、j、k分别为单元格节点对应的x、y、z的离散坐标值。若坐标为i、j、k的点处无障碍物,则其对应元素值A(i,j,k)=0;若该点处有障碍物,则A(i,j,k)=1。单元格划分越精细,得到的障碍物信息越精确。在记录障碍物时采取高精度来保证记录信息的准确性。
对于有减振构型要求管路,如排气管与回气管,根据其构型约束及管路径,将障碍物网格映射为以压缩机为中心的圆柱形区域内由扇形单元组成的网格,以减小搜索空间提高算法运算效率,转换方法如下所述。
以压缩机为中心,选取合适长度的环形中心基面半径rb及环形区域厚度t,确定1个环形管路布置空间,取管径d为精度基准,则圆周向增量Δθ=(d/2)/rb、径向增量Δr=d/2、竖直增量Δz=d/2分别在[0,2π)、[rb-t/2,rb+t/2]、[0,h]范围内均匀取点。采样点Pi坐标为(xi,yi,zi),坐标转换公式为:
(1)
其中:(xi,yi,zi)为第i个点转换后的点坐标,θ0为初始角度;(x0,y0,z0)为旋转中心坐标;z0=0。
利用式(1)得到1组采样点记为M,将其中的每个采样点赋值,形成有构型要求管路的数字化布置空间。即
M(xi,yi,zi)=A(xi,yi,zi)
(2)
无减振构型要求管路(如低压阀接管与冷凝器接管),对于管路构型没有特殊要求。为减少运算量,对于此类管路,寻找1个包含2个端点的包容块空间作为布管空间,避免对整个布管空间进行运算。
对于得到的块状包容空间,利用管路的2个接口点作为长方体的2个对角点,形成1个块状空间。将块状空间6个面分别向外扩展一定的距离,形成1个长方体块状空间。问题由原来的在总空间集合A中找到可行路径点集转化为在子集B中找到可行路径点集。
根据管路直径d,以合适精度在子集B中选取采样点,将得到的采样点集合M作为此管路的数字化布置空间。
2.2 部件及管线模型
在管路布局过程中,将管路、四通阀及管路接口等部件简化为简单的几何模型,便于运算。主要处理包括:
1) 四通阀处理。将四通阀等效为一个包容块。在三维空间中进行平移旋转找到一个适合的位置,保证四通阀周围的管接口留有一定的布置空间。
2) 管接口处理。为满足管接口处的管路方向要求,沿着管接口方向以规定最小长度进行延长,得到新的点作为管路布置的起点或终点,以有效保证管路布置过程中管路路径与管接口正确连接。管接口处理示意图如图1所示。

图1 管接口处理示意图
3) 管路处理。视管路横截面均为圆形且均由直线与圆弧构成,则管路可等效为由两控制点的直线段及圆弧组成,其中控制点为圆弧段相邻的两直线段延伸的交点。管路模型示意如图2所示。

图2 管路模型示意图
2.3 碰撞检测
管路模型简化后,管路布置问题转化为在空间集合M内寻找特殊的一组点作为管路转折点的问题。在确定这组点的过程中需不断检测形成的管线与障碍物有无碰撞。本文提出了一种障碍物检测方法,即查找单段管线指定包容半径范围内的采样点的状态。该方法避免了碰撞检测过程中的矩阵运算,转换为简单的查找,提高了碰撞检测速度。
对管路的两相邻节点Pi(xi,yi,zi)与Pi+1(xi+1,yi+1,zi+1)之间的线段进行碰撞检测。由Pi与Pi+1的坐标可以求出过这两点的空间直线方程,其方程系数分别为a、b、c、d。定义一个点集合E且其中点P(x,y,z)满足:
(3)
其中,d为精度基准。查寻集合E中所有点的状态,若其中存在一点对应值为1,则该管路有干涉;若所有点状态值均为0,则管路无干涉。
3 管路布置算法设计
管路构型是影响空调管路动力学性能及可靠性的重要因素。现有的船舶及航空发动机管路布置方法的目标函数大多以用材最少、管路最短、安装方便等经济方面因素为主。空调管路与船舶管路不同,更加注重管路的动力学性能。
不同算法在不同环境下的优劣不同[13]。逃逸法于1969年提出[8],该算法以向量递增搜索的方式替代了逐个网格搜索的方式,大大降低了计算的空间复杂度。
本文以逃逸法为基础提出向量搜索方法,将每次选定合适长度的向量,在指定的管路布置空间内进行搜索,直到与终端相连。空间向量搜索方法可以很好的满足空调管路布置规范提出的管路构型的要求。
3.1 有构型要求的管路布置
在空调管路布置中,管路布置的先后顺序主要取决于管路类型,对于承受应力或振动水平较高的管路即有构型要求的管路首先进行布置,如排气管与回气管这类有构型要求的管路。这类管路可认为是由围绕压缩机的若干规定长度的竖直线段及将这些竖直线段依次首尾相连的水平线段构成。针对此类管路,先进行竖直向量搜索,保证管路的构型;再进行水平向量搜索,将竖直段依次连成一条路径。有构型要求管路布置流程如图3所示。

图3 有构型要求管路布置流程
有构型要求管路限定在以压缩机轴线为中心的圆柱空间内布置。从起始端到结束端,选取障碍物相对较少的方向,顺时针或逆时针来进行竖直段向量圆周搜索,搜索过程如下所述。
在以压缩机轴线为中心的环形区域内搜索。令第i段管路两端点坐标矩阵为:
Qi=[xiyizi]T,
Qi+1=[xi+1yi+1zi+1]T。
压缩机中心点为Q0=[x0y0z0]T,则:
(4)
其中:ri为竖直管路到压缩机中心距离,ri∈[rb-t/2,rb+t/2];T1=[cos(αi-1+Δα) sin(αi-1+Δα) 0]T为坐标转换矩阵;αi-1为上一段竖直管路与压缩机中心线组成的平面与xoz面的夹角;Δα∈[2arccos(L0/(2rb)),π)为第i段管路旋转角度;Lmin为水平段管路最短长度;R为管路折弯半径。
式(4)中的ri及Δα在其定义域内随意取值,可以得到第i段管路的一组解。将这组解经过碰撞检测选出其中无干涉的解,即可得到管路某一竖直段的一组合理解。按照此方法找到其他几个竖直向量的合理解,直到形成U型弯位,确定管路的大体构型。
用水平向量将布置好的竖直向量顺次连接形成完整的管线。若水平向量有干涉,则通过平移避开,然后得到管路的布置方案。
3.2 无构型要求的管路布置
无构型要求的管路如冷凝器接管与低压阀接管,其承受的载荷水平相对较低,可不优先布置且不必满足构型约束。在其可行空间范围内,利用定长向量进行水平竖直段交替查找,直到找到一条连接两管口的管路路径。
水平向量搜索。令上一竖直段末端点坐标矩阵为Ki-1,坐标变换矩阵为T2,则待求的水平段末端点Ki为:
Ki=LiT2+Ki-1
(5)
其中:Li∈[Lmin+2R,Lmax)为可变长度;Lmax为空间边界限制的最大长度;T2=[cosαsinα0]为坐标转换矩阵,α∈[0,2π)为旋转角度。
在其定义域内改变Li与α的值得到1组解。利用碰撞检测可选出1组无干涉的解,即为该管路某一水平段合法解。
竖直向量搜索。设上一段水平段末端点为Ki-1,则待求的竖直段末端点Ki为:
Ki=Ki-1+[0 0Li]T
(6)
其中:Li为竖直段管路的可变长度,取值范围如上文所述。
通过改变Li的值可以得到1组解。利用碰撞检测可选出一组无干涉的解,即为该管路某一竖直段合理解。
水平向量搜索与竖直向量搜索交替进行,直到当前段管路可以与终点无障碍连接且满足其他约束条件。当遇到无合法解的情况采用回溯法[14]解决,即若当前段查找不到有效解,则退加上一段并选择其他解后,再对当前段进行查找。无构型要求管路布置流程如图4所示。

图4 无构型要求管路布置流程
在管路布置过程中,四通阀体积较大能满足其约束的布置空间有限,应首先布置。考虑到管路布置顺序的影响,先布置有构型要求的管路,再布置无构型要求的管路。有构型要求的管路约束较多先布置可以保证其成功率,并且在可靠性分析中有构型要求管路是所需要关注的重点管路,应首先满足其各项要求。无构型要求管路约束相对较少,其条件相对容易满足。因此,布置顺序依次为四通阀、回气管、排气管、冷凝器接管和低压阀接管。
4 算例分析
利用本文提出的算法对某款空调外机压缩机管路进行自动布管设计,算法运行结果如图5所示。

图5 算法运行结果
首先将压缩机及其所处的空间外隔板等视为障碍物,导入障碍物网格模型如图5a所示,然后应用本文提出的算法得到的走管路径如图5b所示。
从图5可以看出,该空调管路布置算法可以运行出符合空调管路布置规范的结果。红色与蓝色路径分别为压缩机排气管与回气管路径,其分别带有减振的U型弯位,且均满足各自的臂长要求。黑色与绿色分别为低压阀接管与冷凝器接管,其路径可以满足避障与最小长度等要求。该方案稍加修改便可以为空调管路布置提供一个合理的参考,得到的管路布置方案如图6所示。
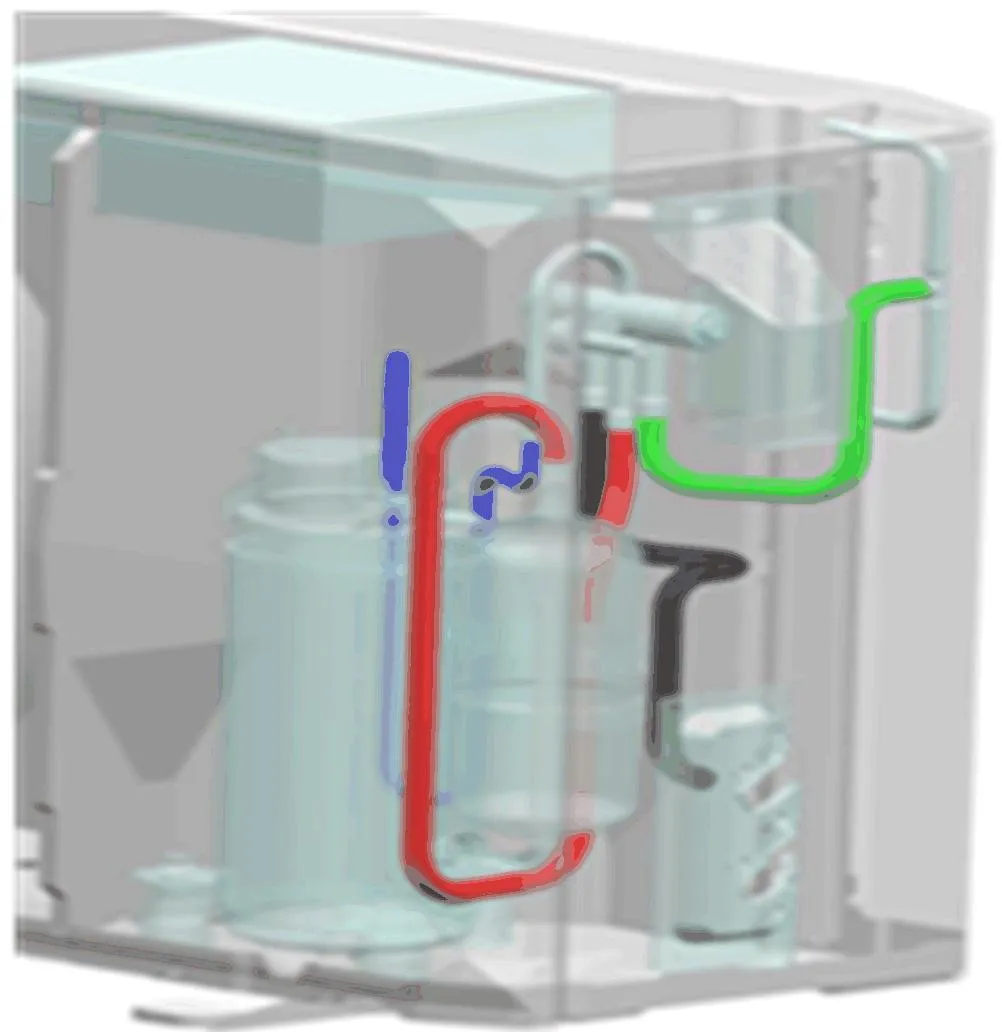
图6 管路布置方案
5 结 论
本文提出了基于空调管路布置的空间向量搜索算法,解决了家用空调室外机压缩机配管布置存在的一些管路构型约束问题。针对管路布置等需要实时进行碰撞检测的情况,本文的碰撞检测方法避免了大量的矩阵运算,采用查找与判断运算,提高了计算效率。对于不同类型的管路定义不同的可行空间,采取不同的向量搜索方式,满足了不同管路的构型要求,为解决带有经验化约束的管路布置问题提供新的解决方法。
猜你喜欢
汽车工程师(2021年12期)2022-01-17
中学生数理化(高中版.高考理化)(2021年12期)2021-03-08
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年10期)2020-02-07
铁道通信信号(2020年9期)2020-02-06
电子测试(2018年1期)2018-04-18
北京航空航天大学学报(2017年10期)2017-04-20
中国工程咨询(2016年12期)2016-01-29
航天返回与遥感(2014年4期)2014-07-31
无机化学学报(2014年4期)2014-02-28