北斗三号系统卫星自主完好性监测技术
2024-03-05 11:14高为广蔡洪亮戴永珊胡旖旎
导航定位与授时 2024年1期
陈 雷, 裴 凌, 高为广, 蔡洪亮, 戴永珊, 陈 颖, 胡旖旎
(1. 北京跟踪与通信技术研究所,北京 100094;2. 智慧地球重点实验室,北京 100094;3. 上海交通大学上海市导航与位置服务重点实验室,上海 200240;4. 上海微小卫星工程中心,上海 201304)
0 引言
随着卫星导航系统应用范围越来越广,导航用户对卫星导航系统的完好性要求也越来越高,需要系统提供当前服务的精度等级,且在导航系统发生异常时,能够快速向用户提供告警信息,以保证导航用户的使用安全[1]。卫星导航服务在生命安全领域应用时对性能提出了精度、完好性、连续性和可用性4个衡量指标。其中,完好性是误差超限时的及时告警能力,根据霍普金斯大学的分析报告《GPS RISK》,将完好性故障风险主要分类为:卫星段故障、传播异常及非敌意干扰等。根据不同完好性故障风险发生概率和故障特征,提出了空基增强、陆基增强和星基增强技术,成功地将全球卫星导航系统(global navigation satellite system,GNSS)应用到民航、铁路、自动驾驶等领域[2-4]。
目前,北斗三号系统定位精度逐渐接近1 m级,已能满足大部分用户对精度的需求[5-6]。与之相比,决定用户安全性能的完好性问题变得日益突出。从用户安全的角度考虑,尤其是对于生命安全服务,卫星导航系统的完好性具有极其重要的地位。对于不同用户类型,系统应给出更加详细具体的告警门限和完好性风险需求,要求在尽量节省系统资源的前提下提供更短时间和更小风险的完好性服务,同时也兼顾完好性风险概率与可用性、连续性之间的协调一致性[7-9]。
完好性监测技术从实现载体的角度,通常可以分为三类:接收机自主完好性监测(receiver autonomous integrity monitoring,RAIM)技术、卫星自主完好性监测(satellite autonomous integrity monitoring,SAIM)技术和系统地面完好性通道(ground integrity channel,GIC),一般以告警限值、告警时间和完好性风险概率共3项具体指标表征。北斗卫星导航系统由地球静止轨道(geostationary orbit, GEO)卫星、倾斜地球同步轨道(inclined geosynchronous orbit,IGSO)卫星、中圆轨道(medium Earth orbit,MEO)卫星混合星座组成[10],区域监测网[11]对移动卫星尤其是MEO卫星可监测弧段非常短,若仅依靠地面GIC进行监测,难以满足全球范围对快变误差的监测告警需求。为弥补地面区域监测网覆盖不足,提升系统完好性服务能力,北斗三号系统在全球范围内,首次工程化实现了SAIM功能,通过SAIM与GIC联合,提升了系统基本完好性服务能力,SAIM技术的优势是告警时间最短,难点在于对星上、星间链路资源要求高[12-14],监测算法由于不是第三方监测,相较于地面完好性监测更为复杂,是完好性监测技术发展的前沿趋势,GPS III和Galileo等国外卫星导航系统均竞相发展。
本文介绍了北斗三号系统SAIM技术的功能设计、实现原理及后续发展建议,可为我国更好地提升和发展完好性监测能力提供参考。
1 北斗三号SAIM技术体制
SAIM技术[15],是指在卫星上自主完成完好性监测,导航卫星自身对所播发的导航信号通过多路直接反馈处理,进行调制信号、导航电文数据和卫星钟等状态的监测处理,形成相应的完好性信息随导航电文播发给用户。作为一种全新的完好性监测手段,由于不受传播路径误差影响,完好性监测处理方法简单,告警实时性高,是GNSS卫星导航系统完好性技术升级的重要内容之一[16]。SAIM技术的主要难点在于星载监测设备的设计与实现,GPS将在GPS III系统中实现SAIM[17-18],而北斗三号系统则是首次实现SAIM技术的全球卫星导航系统。
1.1 功能设计
由于北斗卫星导航区域监测网对卫星的覆盖局限,对传统的地面完好性监测提出了挑战。北斗卫星导航系统由GEO/IGSO/MEO混合星座组成,图1给出了北斗地面控制系统监测网对卫星的覆盖深度,其中白色为卫星星下点轨迹,从图中可以看出,地面监测网对移动卫星尤其是MEO卫星可监测弧段非常短,仅依靠地基完好性监测,难以保证全球范围对快变误差的监测告警需求。

(a) MEO卫星
北斗三号系统SAIM事件及告警手段如图2所示,主要对导航信号异常和卫星钟异常进行在轨监测,其中导航信号异常主要包括功率跳变、伪距跳变、相关峰畸变及码载波偏离等,但实际在轨相关峰畸变和码载波偏离异常暂未参与实际告警;卫星钟异常包括卫星钟频率异常和卫星钟相位异常,均参与实际告警。告警手段主要包括导航信号切非标准码和对卫星健康状态置不可用两种手段。

图2 北斗三号SAIM事件及告警手段示意图
1.2 实现原理
北斗三号SAIM载荷设计主要包括两个部分:一是星上时频稳定性监测,即监测星上时钟的突变;二是星上信号质量监测,包括伪距相位监测、信号功率监测、信号畸变监测和码相位一致性监测。北斗SAIM设计流程如图3所示。
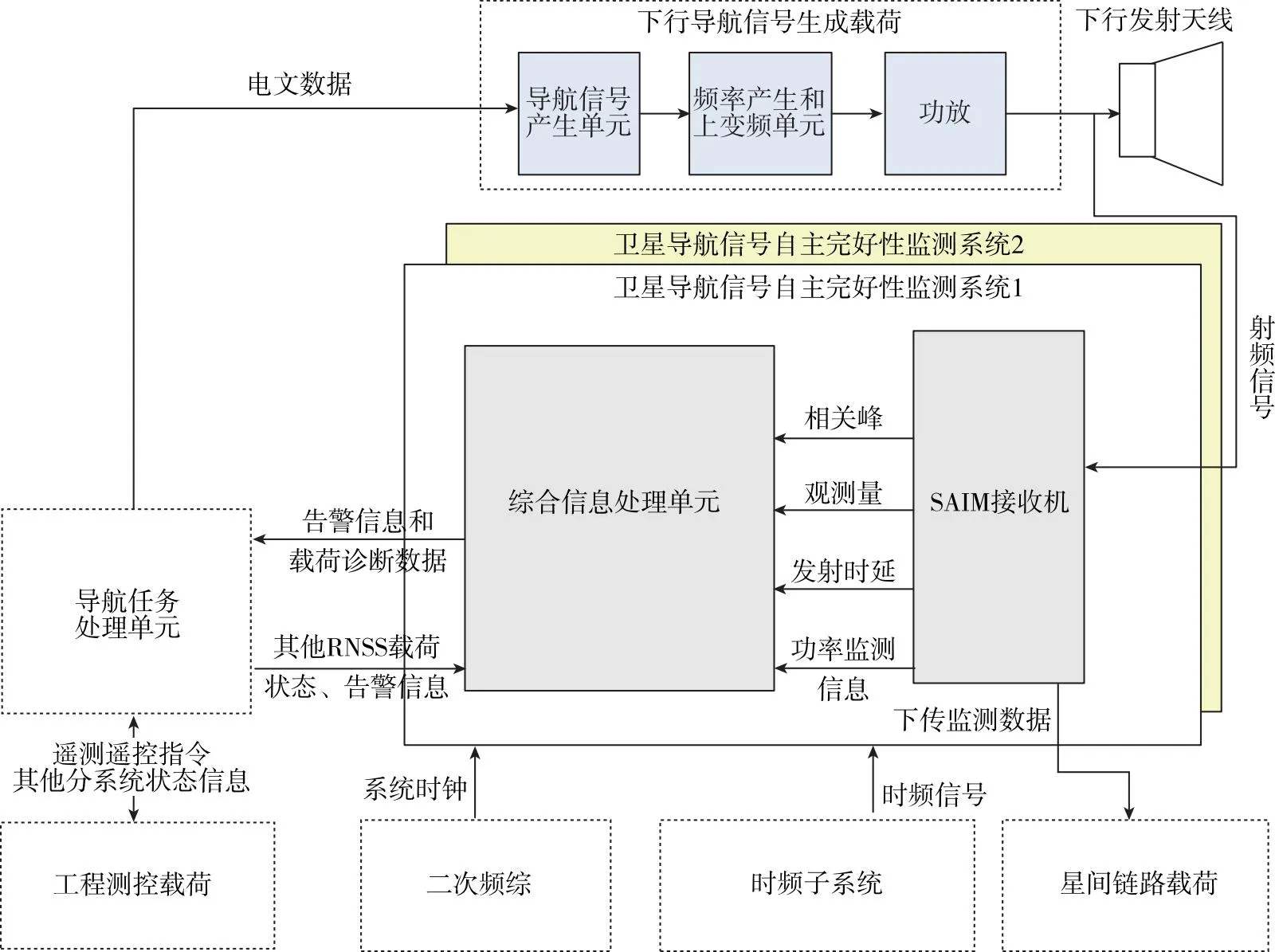
图3 SAIM实现原理
星上时频稳定性监测,利用星载原子钟产生参考历元,同时输出频率通过历元发生器产生一个历元。利用晶振频率填充参考历元和输出频率产生的历元,再通过相位量尺比较相位误差,相位误差经过环路滤波器后进行星载原子钟的完好性监测。这样的设计充分利用原子钟长期稳定度好、晶振短期稳定度好的优点,并利用环路滤波器减小相位量尺噪声的影响,保障了卫星自主完好性可以准确监测到时钟跳变。
星上利用独立信号监测接收机接收卫星所发射的各个导航信号和数据,获取信号的相关峰数据和原始测量数据等信息,接收机内部通过对相关峰数据分析信号质量,监测可能的信号畸变异常现象,然后利用接收机载波和伪码测量数据检查载波与码相位一致性、利用信噪比检查信号功率异常,完成星上信号质量监测。自主完好性监测北斗三号卫星的3个新体制信号B1C、B2a和B3A,3种信号的调制和服务方式列于表1。
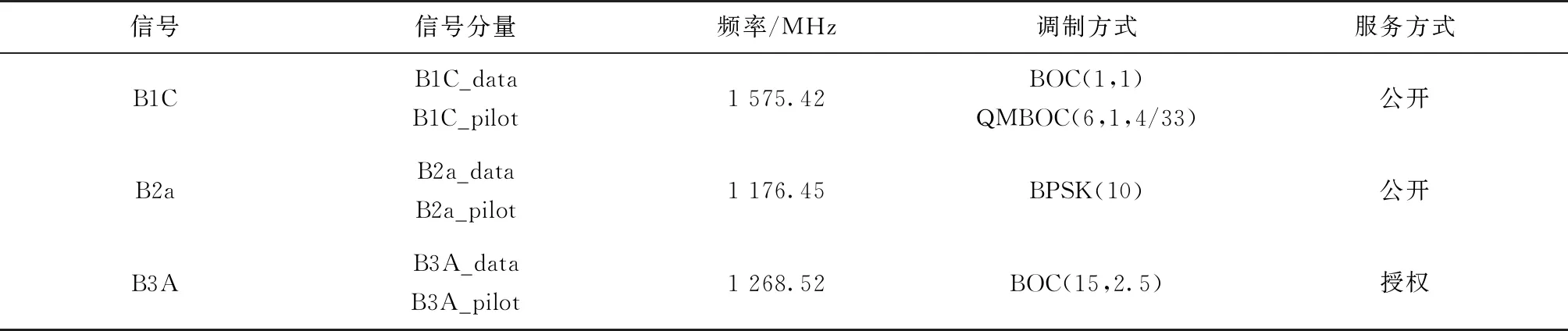
表1 北斗三号卫星下行信号调制与服务方式
北斗SAIM采取两种方式标识信号状态,当监测到异常时,一种方式通过电文进行告警,将电文参数SIF置为“1”;一种方式是将伪码由标准码调制为非标准码。但是卫星自主完好性不能独立完成告警退出,需要地面完好性监测确认信号恢复正常后,由地面发射信号状态恢复指令,才能退出卫星自主完好性告警状态。
通过上述设计,当卫星出现信号畸变、功率低于最小发射功率或卫星钟跳变大于3 ns时,卫星自主完好性可以给出秒级告警。SAIM单机通过主备全开的“双工”模式,能够有效降低监测虚警,主份和备份独立监测卫星钟、导航信号及导航电文异常状态,仅在主备份均出现异常时才发出告警标识。
2 在轨运行分析
北斗三号系统首次在实际在轨卫星上工程化实现了SAIM技术[19-20]。虽然前期在系统的服务性能监测评估中,对SAIM数据的正确性进行过验证,但对于其监测数据的分布特性尚无系统性分析。理论上,SAIM数据在卫星正常运行服务期间,应围绕某一均值,附加高斯白噪声,即理论服从正态分布。但考虑到实际在轨卫星所处空间环境较为复杂,且监测数据受单机工作状态、温度及不同研制单位产品特性等多种不确定因素影响[21],其实际在轨的正态分布特性服从程度和长期稳定性等问题需利用长期在轨实际连续监测数据,开展系统性、全星座的深入研究。
本文随机选取某一颗MEO卫星自2020年7月31日北斗三号系统正式开通服务以来至2021年7月31日连续1年期间的监测数据,得到工程化应用的SAIM数据分布特性,以验证其监测数据实际在轨分布特性。
2.1 导航下行信号功率监测
2.1.1 监测方法
在下行导航天线前端,通过耦合得到小功率信号作为完好性监测接收机的输入端。输入信号经过数字采样量化后,经过混频、滤波、抽取及量化后输出。
根据信号处理模块采集到的功率监测信息,从卫星信号的功率方面监测和评估导航信号质量。正常情况下,星上监测的信号功率围绕均值在一定范围内波动,一旦导航信号功率下降超过告警阈值,SAIM给出告警信息。在卫星发射之前,SAIM的告警阈值采用经验初始值。在信号正常情况下,星上信号功率监测数据应该具有较高的稳定性,通过对实际数据标准偏差和分布特性进行分析,设计合理的星上告警阈值,对星上告警门限进行重构。
2.1.2 在轨监测数据统计
图4给出了北斗三号PRN C19卫星全年的功率监测时间序列。其中,图4(a)为B1C信号功率监测值,图4(b)为监测值的Q-Q图,图中红色线为正态分布参考线,蓝色线为功率监测数据的分布曲线。蓝色线越接近红色线,表明监测数据越接近正态分布,横坐标单位为d。
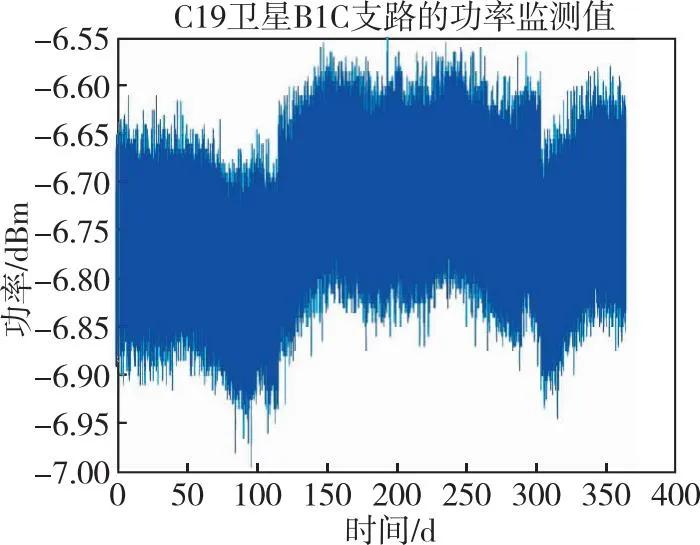
(a) 原始监测数据
2.2 伪距测量监测
2.2.1 监测方法
星上载荷故障或指令异常可能引起用户观测的伪距异常跳变。利用星上接收机对伪距观测值进行监测,由于星上接收机和卫星钟采用了不同的频率源,星上伪距测量存在线性漂移,通过在信号时延测量过程中进行钟差补偿,使星上监测接收机的伪距围绕均值在一定范围内波动。
星上伪距计算方式是通过测量本地时间和信号时间来计算伪距的,由于下行信号延迟较小且延迟相对固定,因此信号时间只需要计算码片计数和码相位,无需解整周模糊[22-23]。
Pr=tsignal-tlocal
(1)
tsignal=Cntchip/Rchip+ Phasecode*216/Rchip
(2)
tlocal=Cnt20 ms×0.02+Cnt10.23/10.23×106+
Clkphase*216/10.23×106
(3)
式中,Cntchip是码片计数;Rchip是码速率;Phasecode是码相位;216是由于码数字振荡器(numerically controlled oscillator, NCO)采用16位实现;Cnt20 ms是20 ms计数;Cnt10.23是10.23 M计数;Clkphase是10.23 M码相位。如果某路导航信号的伪距发现异常跳变,且超过告警阈值,则给出该路信号的告警信息。
2.2.2 在轨监测数据统计
图5给出了北斗三号PRN C19卫星全年时间的伪距监测时间序列。其中,图5(a)为B1C伪距测量监测值,图5(b)为监测值的Q-Q图,图中红色线为正态分布参考线,蓝色线为伪距测量监测数据的分布曲线。蓝色线越接近红色线,表明监测数据越接近正态分布,横坐标单位为d。

(a) 原始监测数据
2.3 卫星原子钟相位和频率监测
2.3.1 监测方法
星钟频率的输出信号可以表示为
V(t)=[V0+ε(t)]sin[2πf0t+φ(t)]
(4)
式中,V0为标称振幅;ε(t)为振幅的起伏;f0为标称频率或长期平均频率;φ(t)为相位偏差;由式(4)可知,信号的瞬时相位为
φ(t)=2πf0t+φ(t)
(5)
而瞬时频率是相位的时间导数,即
(6)
于是,瞬时频率为
(7)
瞬时相对频率偏差为
(8)
由式(8)可知,对于星钟,主要监测φ(t)项。星钟跳频、跳相的监测是通过锁相环实现的,即一个环路相位跟踪系统,它通过负反馈来对本地信号的频率和相位进行调节,以实现对参考信号的跟踪。若卫星钟相位或频率异常跳变超过预设的告警门限,则所有信号均进行告警。通过对相邻历元钟差测量值进行二次差分,消除卫星钟与本地参考晶振的频差引入的相位偏移,可以对卫星钟相位跳变进行监测。卫星钟频率跳变可由相位跳变导出。
2.3.2 在轨监测数据统计
由于卫星钟频率跳变可由相位跳变导出,即频率监测值和相位监测值有着一致的分布特性,因此本文中在轨监测数据分布特性选取相位监测值作为分析。
图6给出了北斗三号PRN C19卫星全年时间的相位监测时间序列。其中,图6(a)为相位监测值,图6(b)为监测值的Q-Q图,图中红色线为正态分布参考线,蓝色线为相位监测数据的分布曲线。蓝色线越接近红色线,表明监测数据越接近正态分布,横坐标单位为d。
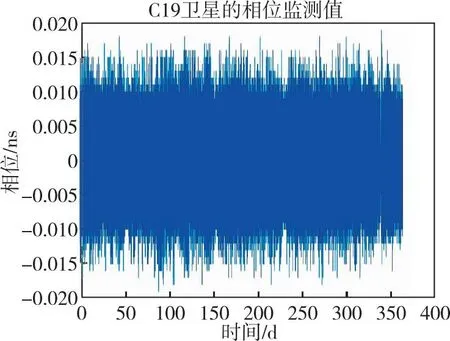
(a) 原始监测数据
通过随机选取某一颗卫星对卫星自主完好性在轨监测数据中的功率监测、伪距测量监测、卫星原子钟相位和频率监测结果按照时间序列绘制Q-Q图,综合表2所示的统计数据,可以得到以下结论:

表2 北斗三号卫星下行信号调制与服务方式
1)导航下行信号功率监测和伪距测量监测结果基本符合正态分布特性;
2)卫星钟频率和相位监测值整体上看均有较高稳定性,偏度绝对值均小于0.5,近似正态分布;
3)SAIM数据在长时间段下呈现出细微分段现象,主要是受空间环境、卫星工作状态影响,导致监测结果长期特性存在细微分段,但整体依然满足正态分布。
3 未来研究与发展方向
由于北斗三号系统是首个工程化实现SAIM技术手段的GNSS,相关SAIM的参数处理算法和相应的用户使用算法都没有成熟的理论方案可供参考,因此在后续发展方面,仍有较大提升优化空间。本文结合SAIM在轨实际运行状态,针对性提出后续研究与发展方向。
3.1 告警门限动态优化
北斗三号 SAIM 告警门限与地面完好性监测告警门限是独立设计,SAIM告警门限设置比目前地面完好性监测告警门限值更为严苛,星地告警门限值相互之间并无匹配映射关系,存在 SAIM 监测告警、但地面完好性监测由于未达到告警门限而不告警问题,对用户应用造成困扰。
SAIM告警门限包括时延监测告警门限、功率监测告警门限、卫星钟相位跳变监测告警门限和卫星钟频率跳变监测告警门限,这些告警门限均是卫星上天之前,主要依据地面测试仿真情况设计的。目前北斗三号系统已正式开通服务2年多,部分卫星在轨运行最长已4年有余,已经积累了大量SAIM数据,应根据在轨监测数据长期变化特征及分布特性、系统服务指标要求,结合故障诊断和用户告警等多种完好性监测需求,开展告警门限优化设计,满足实际应用要求,从而优化系统服务的完好性、连续性和可用性。
3.2 分级告警策略设计
现行的告警策略,无论是SAIM还是地面,都是只要一触发告警门限就会告警。目前地面告警,以判断空间信号测距误差(signal-in-space range error, SISRE)为主,目的是确保用户的测距精度满足要求。而卫星监测的对象中,伪距、相位、频率这3项,是可以映射到地面SISRE的,也就是说,这3个监测对象的告警门限设计还需兼顾与地面告警一致性。
目前地面告警门限是4.42 SISA(约5 m),HS是固定门限(单频4 m和双频7 m),扣除传播段误差后,直接反映到卫星上的伪距、相位、频率的门限值为3 m,而相较于告警门限值1 m差别较大,其本质原因是门限值1 m是面向卫星运行健康状态的监测,而门限值3 m是面向用户使用的监测,因此客观上就会存在很大差异。但现行的告警策略是执行单一告警门限,监测数据触发后即向用户告警,即使用面向卫星健康状态监测的门限值,去向用户发出告警,相比系统为用户提供的服务精度更加严苛,后续可以针对卫星健康状态监测和用户服务的差异,采样分级的监测门限,优化系统虚警性能。
SAIM的告警方式包括非标准码告警、电文告警及通过遥测向地面站告警3种方式,应该根据具体告警门限进行多级完好性监测告警。
3.3 星历完好性自主监测设计
目前,星历的完好性监测,只能依赖地面基本完好性监测实现,卫星自主完好性尚不具备对星历的自主监测能力,将对系统完好性风险造成潜在影响。虽然当前空间环境下,星历异常事件属于小概率事件,系统整体的完好性风险概率也能够满足指标要求,但考虑到未来一段时间的空间环境变化对导航卫星造成的单粒子效应影响问题,可以预见卫星星历异常发生的频率将随之增加,如不解决对星历的完好性监测问题,后续系统完好性风险概率有超差的风险。
北斗三号MEO卫星轨道高度约20 000 km,在此高度上,卫星会长期处于周期性波动的高能电子辐射空间环境中。根据导航卫星的设计及实现情况,并基于长期运行监测经验,发现空间环境发生恶劣变化,会威胁并影响卫星内部电子器件性能,可能导致相应数据bit位发生错误翻转,最终产生错误信息。因此,可以认为导航电文中星历信息发生异常的概率与导航卫星所处的空间环境呈正相关关系,即空间环境越恶劣,则星历信息发生异常的概率越大。北斗三号MEO卫星的设计寿命为10年,将经历整个太阳活动周期,其中有5年是处在太阳活动峰值期,爆发活动相对比较频繁,卫星受单粒子效应的影响将更为显著。中科院空间环境监测中心对2006年—2022年太阳周期F10.7 cm辐射通量的空间环境情况进行统计及未来趋势进行预测,结果显示,2014年—2022年为太阳活动平缓期,2022年之后将进入空间环境活跃期,将在2026年左右到达太阳活动峰值。根据过往历史运维经验,太阳活跃程度与单粒子效应发生频率呈正相关,空间环境恶化程度明显,意味着星历信息发生异常的概率也将随之增大,如果不对星历完好性监测这一短板进行补强,将导致在太阳活跃周期期间,北斗系统处于完好性风险事件高发期,制约用户使用。因此,非常有必要基于当前系统实际情况,针对北斗三号卫星星历的连续自主监测问题进行深入研究,对SAIM功能进行升级,使其具备对星历的连续、自主完好性监测功能。
4 结论
针对实际在轨的正态分布特性服从程度和长期稳定性等问题,随机选取某一颗MEO卫星自2020年7月31日北斗三号系统正式开通服务以来至2021年7月31日连续1年期间的监测数据,得到如下工程化应用的SAIM数据分布特性:
1)导航下行信号功率监测和伪距测量监测结果基本符合正态分布特性;
2)卫星钟频率和相位监测值整体上看均有较高稳定性,偏度绝对值均小于0.5,近似正态分布;
3)SAIM数据在长时间段下呈现出细微分段现象,主要是受空间环境、卫星工作状态影响,导致监测结果长期特性存在细微分段,但整体依然满足正态分布。
后续发展必要性建议方向:告警门限优化、分级告警策略设计、星历完好性自主监测等。
猜你喜欢
汽车实用技术(2022年4期)2022-03-07
中国西部(2021年4期)2021-11-04
华东师范大学学报(自然科学版)(2020年1期)2020-03-16
测绘科学与工程(2017年3期)2017-08-16
重庆交通大学学报(自然科学版)(2017年3期)2017-05-17
环球市场信息导报(2016年41期)2017-01-19
测绘通报(2016年12期)2017-01-06
中学生数理化(高中版.高二数学)(2016年4期)2016-03-01
湖北师范大学学报(自然科学版)(2015年3期)2015-12-05
湖湘论坛(2015年3期)2015-12-01