基于CFD的机械随动调节高度控制阀数值仿真
2024-03-07 12:06周耀兵严伊豪高隆隆李宝仁
液压与气动 2024年2期
周耀兵, 严伊豪, 高隆隆, 李宝仁
(1.武汉第二船舶设计研究所, 湖北 武汉 430064; 2.华中科技大学 机械科学与工程学院 FESTO气动中心, 湖北 武汉 430074)
引言
气动技术是以压缩机为动力源, 以压缩气体为工作介质, 进行能量传递和信号传递的工程技术, 是实现各种生产控制、自动控制的重要手段之一。气动技术由于快速性好、结构简单、使用维护方便, 在民用和国防等工业部门得到广泛应用[1]。
随着列车行车速度的提高,轨道高低不平顺造成的轮对跳动加剧,对乘车舒适性造成不利影响[2]。为了解决这些安全问题,在车体和转向架之间安装 悬挂控制装置,其核心部件就是机械随动调节高度控制阀[3]。机械随动调节高度控制阀其本质是流量调节阀,由阀体、阀芯、阀套、套筒、端盖、偏心轮等部件组成,实现了根据载荷的变化调节车体高度的目标。机械随动调节高度控制阀状态的好坏,将直接影响到空气弹簧的正常工作,其中流量特性在其性能要求中尤为重要。而目前流量特性主要是通过实验验证。张广世等[4]根据机械随动调节高度控制阀的工作原理建立了力学方程和气体流量方程,并研究了机械随动调节高度控制阀的结构参数如阻尼、杠杆比以及节流面积等对其性能的影响,最终得到了机械随动调节高度控制阀特性与其结构参数的关系式。张新宇[5]建立了机械随动调节高度控制阀的数学模型,分析了机械随动调节高度控制阀内部的节流结构对充排风流量特性的影响,并对比了仿真计算和试验结果。
目前对其流量特性的理论研究主要集中分析和研究其Simulink的数学模型,很少有通过CFD的方式对其进行数值模拟。随着计算机技术的发展和计算流体力学理论的深入研究,采用CFD方法研究阀门流场特性已在许多方面获得与实验基本一致的效果[6],包括阀门流噪声[7]、稳态和振动分析[8-9]、稳态气动力[10]等。因此针对这一问题,采用CFD数值模拟方法对其内部流场进行仿真分析可为其优化设计提供理论基础[11-14]。
1 机械随动调节高度控制阀工作原理
图1为所设计的机械随动调节高度控制阀的结构简图。

1.排风口 2.阀体 3.阀芯 4.阀杆 5.阀套 6.阀座 7.出风口 8.端盖 9.供风口
当轨道列车载荷增加时,空气弹簧压力增加,体积减小,进而列车高度降低,带动机械随动调节高度控制阀的阀杆4旋转,进而通过偏心轮带动阀芯3顶开阀座6,同时其顶端与阀座6压紧,压缩空气通过供风口进入空气弹簧,进而实现对空气弹簧充气,使得空气弹簧压力升高,体积膨胀,推动列车高度回升,直到阀杆4重新回中位,充气过程结束。
当轨道列车载荷减少时,空气弹簧压力减小,体积增大,进而列车高度升高,带动机械随动调节高度控制阀的阀杆4旋转,进而通过偏心轮带动阀芯3脱离阀座6,同时阀套5顶端与阀座6压紧,压缩空气通过空气弹簧排出,进而实现对空气弹簧排气,使得空气弹簧压力下降,体积减小,使得列车高度回落,直到阀杆4重新回中位,排气过程结束。
2 CFD仿真计算
通过对机械随动调节高度控制阀阀口进行流场仿真分析,可以直观的认识其压力、速度、流线等云图以及进出口流量等重要参数,并可以通过仿真分析对其在工作过程中可能出现的问题进行预测以此指导和优化其结构。
本研究主要利用CFD仿真软件Fluent对机械随动调节高度控制阀进行内部流场仿真分析。
对机械随动调节高度控制阀在阀口开度为-9.5°,-7.5°,-5.5°,-3.5°,-1.5°,1.5°,3.5°,5.5°,7.5°,9.5°的工况分别进行静态流场仿真。
以下以机械随动调节高度控制阀阀杆角度为9.5°时为例,进行仿真分析。
2.1 几何建模
为分析阀口位置的流动以及其出口流量,对其内部流体流道进行抽取,从而得到其初步的流道模型经过简化处理,机械随动调节高度控制阀阀杆角度为9.5°时其初步流道模型,如图2所示。
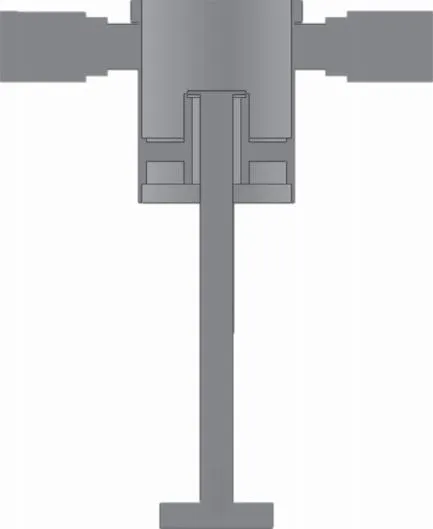
图2 机械随动调节高度控制阀阀杆角度9.5°流道模型
2.2 网格划分
使用Fluent Mesh模块进行网格划分,在此模型中,机械随动调节高度控制阀阀口附近的流道为最小截面流道,其最为关键,其网格应重点划分,因此设置网格划分方法以Curvature(自适应)和Proximity(缝隙)方法生成面网格,并以Ploy-hexcore(多面体—六面体核心)网格生成体网格,其具有更高的网格精度,并能减少60%的网格数量。如图3即为机械随动调节高度控制阀阀杆角度为9.5°时流道模型的网格划分结果。设置其边界条件,在其中定义压力入口和压力出口,其余面的边界条件为墙面。在机械随动调节高度控制阀阀杆角度为9.5°时的机械随动调节高度控制阀流道模型中,网格数量约308万个,其最大歪斜率为0.5946,确保了良好的网格质量。

图3 机械随动调节高度控制阀阀杆角度9.5°流道模型的网格划分结果
2.3 Fluent仿真分析
以下对模型求解过程中相对重要的参数设置进行具体说明。
1) 求解器的选择
在Fluent中给出了3种求解方法:压力基隐式求解、密度基隐式求解以及密度基显式求解。
压力基求解器的求解方法是从原来的分离式求解器发展而来的,其会按顺序依次求解动量方程、压力修正方程、能量方程和组分方程及其他标量方程,如湍流方程等,在密度基求解器中是没有的。
本研究的机械随动调节高度控制阀选择压力基求解器,其特性能够更好的满足阀口流动模型的求解要求。
2) 流动模型的选择
Fluent提供的流动模型有:Inviscid无黏模型、Laminar层流模型、S-A单方程湍流摸型、k-ε双方程模型、k-ω双方程模型及雷诺应力模型等[15]。
在本研究的阀口数值模拟中,作以下假设:
(1) 流体流动完全为湍流;
(2) 分子黏性影响可以忽略。
k-epsilon双方程模型,是在单方程模型湍流动能K的基础上,再引入一个有关湍流动耗散率ε的方程,其标准工况占内存小,收敛性好适用于可压缩或不可压缩完全湍流流动。根据本研究流场分析的实际特点,本研究的流动模型选择此RNGk-ε模型。
3) 流动介质的选择
在工作过程中流动的介质为空气,且只有这一种介质,故此为单相流,且气体是可压缩介质,所以本研究选择理想气体作为流动介质。
4) 边界条件的设置
在机械随动调节高度控制阀阀杆角度为9.5°时,即排气过程中,其边界条件:压力入口边界设定为1 MPa (表压),压力出口边界设定为大气压。除所设置的进出口外均为Wall边界,且由于气流速度大,故忽略其内部气体与外界的热交换,则壁面设定为绝热壁面,壁面边界为无滑移速度边界。
5) 求解算法的选择
本研究在求解算法方面选择的是SIMPLEC算法,是基于SIMPLE算法的改进算法之一,以保证较好的收敛的效果。
3 仿真结果分析
分析图4机械随动调节高度控制阀阀杆角度为9.5°时压力云图可知, 在经过阀口之前流道内压力符合设置的进口压力1 MPa, 在经过机械随动调节高度控制阀阀口时,由于阀口通流面积的原因压力降低0.3 MPa左右,流道模型的整体压力分布较为稳定,阀口位置产生了一定程度的涡旋。
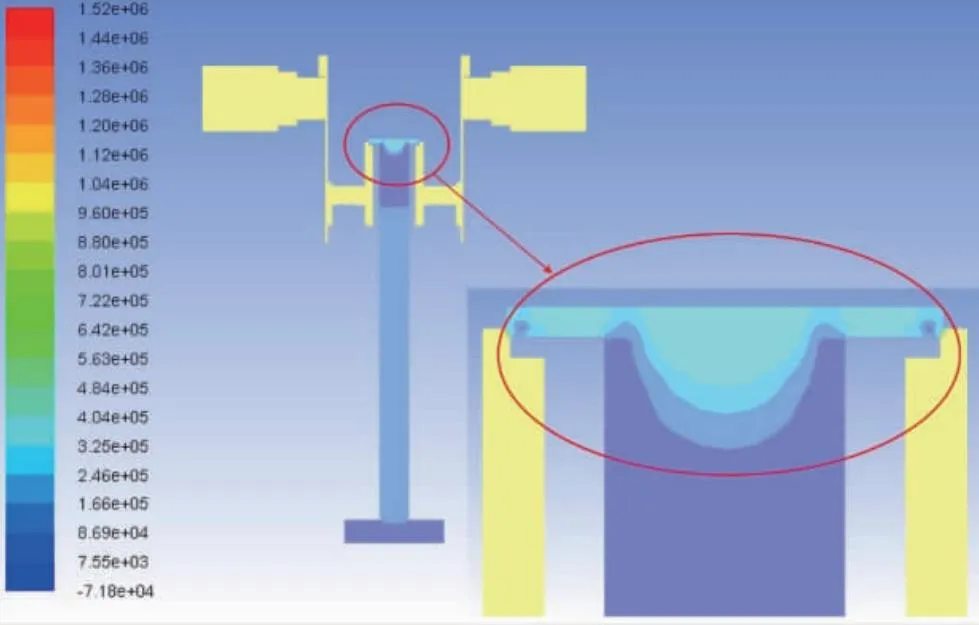
图4 机械随动调节高度控制阀阀杆角度为9.5°时压力云图
分析图5机械随动调节高度控制阀阀杆角度为9.5°时速度云图可知,在经过阀口之前流道内速度状态分布均匀,在经过机械随动调节高度控制阀阀口时,由于阀口通流面积的原因速度有大幅度上升,并在随后至压力出口过程中有明显的速度梯度。

图5 机械随动调节高度控制阀阀杆角度为9.5°时速度云图
机械随动调节高度控制阀阀杆不同角度流经机械随动调节高度控制阀阀口的气体流量仿真结果如下表1、表2所示。

表1 机械随动调节高度控制阀阀杆不同角度时流经阀口供气流量及阀芯位移
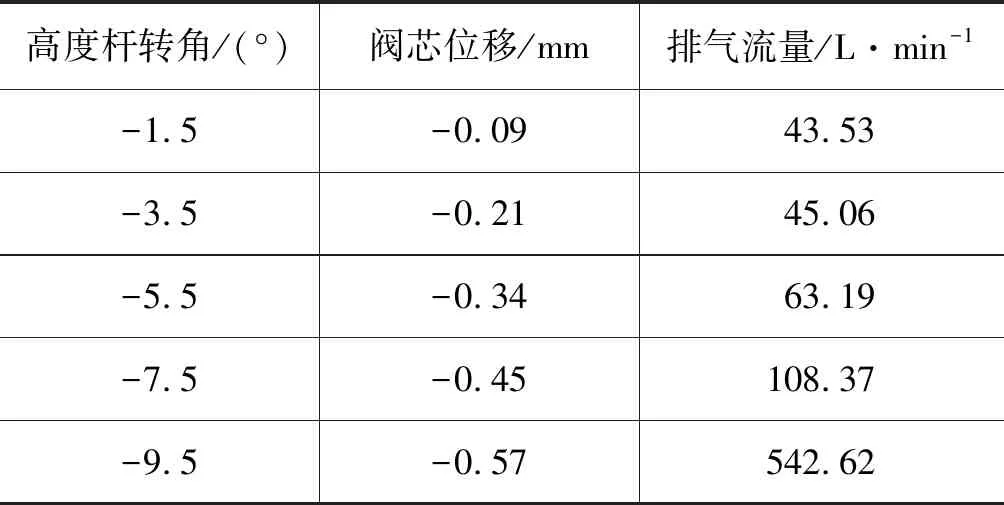
表2 机械随动调节高度控制阀阀杆不同角度时流经阀口排气流量及阀芯位移
根据表1与表2的数据绘制机械随动调节高度控制阀阀口流量曲线如图6所示,图中Min,Max分别为在空气悬挂系统中机械随动调节高度控制阀实际工作要求最小、最大流量曲线,可以看出机械随动调节高度控制阀阀杆在不同转角下的阀口流量符合规定的范围内。

图6 机械随动调节高度控制阀阀口流量仿真曲线
4 结论
(1) 本研究提出了机械随动调节高度控制阀流量试验仿真方案,可对试验结果进行预测;
(2) 本研究以机械随动调节高度控制阀阀杆开度为9.5°为例对机械随动调节高度控制阀阀口流量进行了数值模拟,并对其压力云图和速度云图进行了分析;
(3) 本研究对机械随动调节高度控制阀的结构设计和优化以及控制特性的改善具有一定的指导意义。
猜你喜欢
塑料包装(2020年4期)2020-09-24
湖北农机化(2020年4期)2020-07-24
塑料包装(2020年1期)2020-04-09
石油化工自动化(2018年5期)2018-11-14
中国核电(2018年3期)2018-10-10
智富时代(2018年3期)2018-06-11
智富时代(2018年3期)2018-06-11
工业设计(2016年7期)2016-05-04
设备管理与维修(2016年5期)2016-03-16
工程建设与设计(2016年4期)2016-02-27