基于计算机视觉的电子元件表面缺陷检测算法
2024-03-16 10:11任学龙
科学技术创新 2024年6期
任学龙
(俐玛光电科技(北京)有限公司,北京)
引言
在电子制造领域,对电子元件表面缺陷的检测是一项至关重要的任务。在电子制造过程中,表面缺陷是影响电子元件质量的关键因素之一[1]。这些缺陷可能源于生产过程中的各种因素,如材料问题、工艺控制不当等。如果这些缺陷未被及时发现和处理,将可能引发后续的产品质量问题,甚至可能对整个生产线产生负面影响[2]。因此,对电子元件表面缺陷进行及时、准确的检测具有重要意义。
传统的电子元件表面缺陷检测方法主要采用文献[2]提出的方法原理,这种检测方法效率低下,而且易受检测环境因素影响,难以充分挖掘缺陷特征,导致检测准确性受限。
在计算机视觉与人工智能的飞速发展下,利用计算机视觉进行电子元件表面疵病检测已成为一个热门课题[3]。计算机视觉技术可以对电子元器件的表面缺陷作出有效检测。通过处理获取的图像、视频数据,得到对应场景的二维、三维信息,可自动、快速、准确地检测出被测物体的表面缺陷,从而极大地提升加工效率与产品质量[4]。
基于此,本文引入计算机视觉,开展了电子元件表面缺陷检测算法的深入研究,为实现对电子元件表面缺陷的自动、快速、准确检测,为提高元件的生产效率和产品质量作出贡献。
1 电子元件表面缺陷检测算法研究
1.1 电子元件图像滤波处理
在基于计算机视觉的电子元件表面缺陷检测算法中,电子元件图像滤波处理是算法开始的第一步,能够有效地消除图像中的多余噪声,对提高检测结果的准确率起到了至关重要的作用[5]。
首先,使用拍照装置获取电子元件的表面图像,确保采用高分辨率相机和适当的照明条件来获取高质量的图像[6]。本文采用均值滤波方法,对电子元件图像进行滤波处理。设定原始图像像素点的灰度值用f(x,y)表示,基于均值滤波处理后,得出图像像素点灰度值g(x,y)。均值滤波处理数学表达式如下所示
其中,ω 表示图像像素点坐标为 (x,y)的邻域像素点集合;ω 表示邻域像素点集合 ω包含的像素点个数。针对电子元件图像中的每一个像素点 (x,y),在该点周围选取具有一定尺寸的邻域。将选取的邻域中所有像素点的平均灰度值,作为图像像素点(x,y)的灰度值,进而可以得出滤波处理后的图像g(x,y)[7]。在适当的范围内,选取的电子元件图像邻域像素点数量越多,则 ω的值越大,图像均值滤波的降噪效果越好,图像越清晰,噪声点越少。
1.2 图像阈值分割
电子元件图像滤波处理完毕后,有效地消除了原始图像中存在的冗余噪声。接下来,对电子元件图像进行阈值分割,将图像中的目标和背景进行区分,突出感兴趣的目标区域,同时减少图像数据量,提高后续处理的速度和效率,以实现图像的简化目标。
本文采用全局阈值分割方法,首先,令电子元件图像的直方图表示为
其中,n表示电子元件图像中像素的总数;nq表示局域图像中具有灰度级的像素数量;q 表示图像对应的灰度级;L 表示图像中可能的灰度级总数[8]。设定电子元件图像分割阈值为k,C1表示灰度级为[0 ,1,2,...,k]的像素集,C2表示灰度级为[k+ 1,...,L-1]的像素集合,此时,图像类间方差可以表示为
其中,P1(k)、P2(k)分别表示集合C1、C2发生的概率,表达式分别如下所示
m1(k)、m2(k)分别表示集合C1、C2中像素的平均灰度值;mG表示电子元件图像全局均值。此时,电子元件图像灰度级从0 到k 的平均灰度的计算公式如下所示
1.3 基于计算机视觉的电子元件表面缺陷检测算法设计
图像阈值分割完毕后,获取电子元件表面缺陷初步检测结果。接下来,利用计算机视觉技术,设计电子元件表面缺陷检测算法,进一步精确检测元件表面是否存在缺陷。首先,使用OpenCV 计算机视觉库,读取要处理的电子元件图像,并将其转换为灰度图像。其次,使用Prewitt 算子边缘检测算法,计算图像的水平和垂直方向梯度,得出电子元件梯度图像。计算公式分别如下所示
其中,Gx(x,y) 表示图像在坐标点 (x,y)处的水平方向梯度;Gy(x,y)G x(x,y) 表示图像在坐标点(x,y)处的垂直方向梯度;I(x,y)表示图像在坐标点(x,y)处的像素值[10]。根据梯度图像中的边缘信息,提取出电子元件图像的边缘。根据边缘像素点的梯度值和方向,计算出梯度的幅值和方向,公式如下所示
其中,R(x,y)表示图像梯度幅值;S 表示图像梯度方向,取值范围为[-π/2,π/2]。统计图像的梯度幅值和方向,得到图像的梯度特征。由于电子元件图像水平梯度投影均值与垂直投影均值均属于整个图像梯度的均值,用M 表示,结合电子元件的功能及特征,设置一个适用于该元件的梯度均值阈值Tc。若M<T,则判断该电子元件表面无缺陷;若M≥T,则判断该电子元件表面存在缺陷,实现电子元件表面缺陷检测目标。
2 实验分析
2.1 实验准备
基于计算机视觉的电子元件表面缺陷检测算法的实验目的在于验证算法对电子元件表面缺陷的检测准确性,包括对不同类型的缺陷进行正确分类和识别,同时探究其在不同类型电子元件表面的适用性。
在实验开始前,根据计算机视觉的运行需求,搭建实验测试环境。环境配置如表1 所示。

表1 电子元件表面缺陷检测实验环境配置
按照表1 所示的配置参数,搭建此次实验的测试环境。实验数据集包含1 400 张电子元件表面图像,其中500 张为正常表面图像,900 张为具有缺陷的表面图像。这些图像涵盖了电阻、电容、二极管等多种类型的电子元件,数据集的具体信息如表2 所示。

表2 实验数据集具体信息
按照表2,选取实验数据集,为了方便实验中使用和比较不同算法的性能,对所有图像都进行了归一化处理,将像素值调整到[0,1]的范围内。同时,为了保护数据集的隐私和安全,对所有图像都进行了脱敏处理,将敏感信息进行遮盖。在此基础上,应用本文提出的基于计算机视觉的电子元件表面缺陷检测算法,开展实验测试,根据测试结果,评估该算法是否可行。
2.2 检测结果分析
为了增强此次实验测试结果的可信度,采用对比实验,将本文提出的基于计算机视觉的电子元件表面缺陷检测算法设置为实验组,将文献[2]提出的电子元件表面缺陷检测方法、文献[6]提出的电子元件表面缺陷检测方法分别设置为对照组1 与对照组2,通过对比三种方法的检测结果,验证本文提出的检测算法是否可行。选取电子元件表面缺陷检测率作为此次实验的评价指标,缺陷检测率计算公式如下所示
其中,Mj表示算法检测到的电子元件表面缺陷样本数;M 表示选取的缺陷样本数。这个公式用于评估算法对电子元件表面缺陷的检测能力和效果。通过对比不同算法的缺陷检测率,可以评估算法在表面缺陷检测方面的性能优劣。缺陷检测率越高,说明算法对表面缺陷的检测能力越强,准确性和完备性越好。利用模拟分析软件,模拟三种方法的检测全过程,测定三种方法针对不同类型缺陷的检测率,并作出对比,结果如图1 所示。
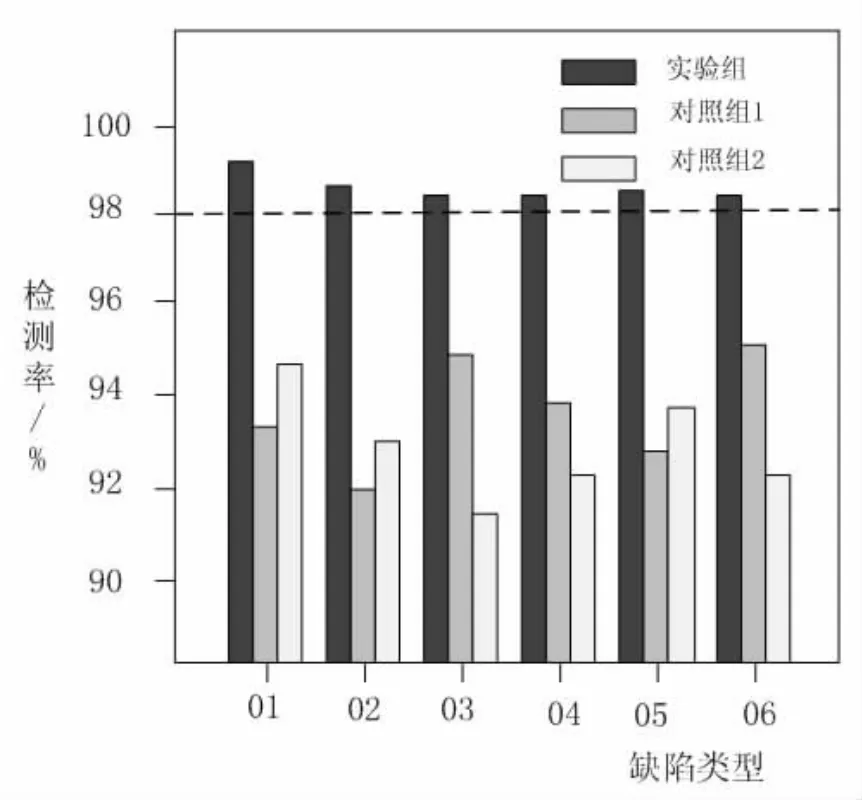
图1 电子元件表面缺陷检测率对比结果
通过图1 的对比结果可知,本文提出的基于计算机视觉的电子元件表面缺陷检测算法应用后,对6 个不同类型的电子元件表面缺陷的检测率始终高于另外两种检测方法,缺陷检测率较高,说明算法对表面缺陷的检测能力更强,准确性和可靠性更好,可以帮助电子企业及时发现并解决元件生产过程出现的表面缺陷问题,检测效果优势显著。
结束语
开展基于计算机视觉的电子元件表面缺陷检测算法研究的重要性在于,它不仅可以提高生产效率,更能够从根本上保障电子元件的生产质量,为现代电子工业的稳健发展提供有力支撑。本文提出的研究,有效地实现了对电子元件表面缺陷的高精度检测,使检测算法达到相当高的检测率,以适应各种复杂场景和多变条件,进而实现对各种类型和复杂度的表面缺陷的高效检测。通过使用计算机视觉技术,可以实现自动化、高精度的缺陷检测,减少人工检测的误差。然而,基于计算机视觉的电子元件表面缺陷检测算法设计也面临着一些挑战和问题,在未来的研究中,应当不断推动算法的标准化和规范化,以促进其在不同行业和领域中更广泛的应用和互操作性,为电子工业的未来发展带来更加显著的价值和贡献。
猜你喜欢
山东冶金(2022年4期)2022-09-14
数学物理学报(2021年6期)2021-12-21
中国电子报(2020年61期)2020-09-12
应用数学(2020年2期)2020-06-24
数学年刊A辑(中文版)(2018年2期)2019-01-08
上海大学学报(自然科学版)(2018年5期)2018-11-02
电脑知识与技术(2018年35期)2018-02-27
电子元件与材料(2017年7期)2017-07-24
自动化学报(2017年11期)2017-04-04
电子元件与材料(2016年8期)2016-02-27