面向载人月球探测的确定性以太网应用研究
2024-03-17 04:29陈朝基孙寅涵孙志刚何熊文程博文訚耀保
宇航学报 2024年1期
陈朝基,孙寅涵,孙志刚,王 丹,何熊文,程博文,刘 岩,訚耀保
(1.同济大学机械与能源工程学院,上海 201804;2.北京空间飞行器总体设计部,北京 100094;3.国防科技大学计算机学院,长沙 410073)
0 引言
20 世纪1969 至1972 年间,美国通过阿波罗计划先后6 次搭载航天员成功登月。当前,世界主要航天国家再次掀起载人月球探测热潮。2019 年美国发布阿尔忒弥斯重返月球计划,预计在2025年前后实现载人登月[1],后续将支持月面长期驻留,并为载人火星探测奠定基础。俄罗斯也制定了自己的载人月球探测计划,目标是2030年前后实施载人登月,2035 年后建成月球基地。欧洲、日本等通过国际合作的方式积极参与美国主导的阿尔忒弥斯计划,印度也在积极发展月球探测和载人航天计划。中国经过载人航天与探月工程的发展,开展载人月球探测的时机已经成熟[2],目前已完成关键技术攻关,正在稳步推进载人月球探测的相关研制工作。
各国的载人月球探测规划基本都包含了载人登月、月球基地建设以及远期的月球资源开发利用发展阶段。未来的载人月球探测任务将是一个由月球科研试验站、月面移动实验室、月面着陆器、航天员、月球车和机器人(如图1 所示)等组成的人机联合探测系统,将更聚焦月球科学探测和资源的开发利用[3]。月球探测航天器的设计需支持由月球车自主或航天员驾驶实现月面的大范围移动探测,支持月面机器人协助航天员开展月面作业、科学探测和资源开发利用;这与阿波罗计划只以成功实施登月为核心任务相比,需要航天器具备更长周期、更大范围的月球探测能力。因此对航天器信息系统数据传输能力的要求也越来越高,基于传统数据总线的航天器信息系统设计将面临较大挑战,亟需开展新一代载人月球探测航天器高速数据总线的探索研究。
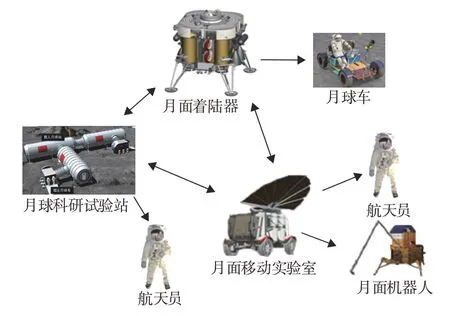
图1 载人月球探测任务场景示意图Fig.1 Manned lunar exploration mission scene
针对载人月球探测任务中的信息系统数据总线设计问题,本文首先分析了载人月球探测任务对航天器信息系统数据传输的需求,然后介绍了确定性以太网技术的产生背景、技术原理和发展现状,其次总结了确定性以太网技术的工程应用存在的难点和关键技术,最后提出了面向载人月球探测任务的航天器信息系统确定性以太网技术发展趋势和应用构想,为我国未来航天器信息系统数据总线的设计和实现提供思路。
1 载人月球探测信息传输需求分析
载人月球探测航天器信息系统的数据总线用于实现器内各电子设备的信息互联和数据传输功能。伴随着载人月球探测从简单的月面巡视探测向月球基地建造以及更为复杂的月面资源开发利用方向发展,航天器信息系统的数据管理和传输任务将呈现出数据量大、类型复杂、实时性要求高[4-5]等特点,其中确定性是指传输任务能够在指定的延时及有界的抖动范围内完成传输。这对航天器的数据总线性能提出了更高的要求:
1)在带宽资源方面,通过器内总线进行数据交换、信息共享和综合处理的数据量日益增加,除了需传输航天器的状态遥测、控制指令等平台信息和各种载荷设备的大容量试验数据外,还需要传输支持航天员在轨长期驻留的仪表系统显示、告警数据和生命保障系统的图像、话音、视频、医学生理数据等。这需要航天器的数据总线具备高带宽、高可靠、低时延、高确定性等传输能力,支持航天器的高性能计算机实现月面多种异构资源的综合调度和管理。
2)在轻量化设计方面,传统航天器的信息系统一般采用CAN[6]或1553B[7]总线作为骨干网络,此外选用SpaceWire[8]、1394 等总线起到辅助连接作用,造成了航天器内部总线电缆走线复杂,系统重量代价大,与航天器信息系统设计的集成化和轻小型化的发展趋势不相匹配[9]。
航天器网络中传输的数据业务有多种不同的类型,不同类型的业务对星上数据总线传输的速率和实时性要求也不同:①航天器的平台状态遥测和仪表系统显示、告警数据按照特定的周期下行,地面上行的控制指令则具有突发性,这些业务虽然数据量不大,但需要按照严格的时间传输,对实时性和确定性要求高。②航天器下行的图像、话音、视频、载荷试验数据、医学生理数据等虽然数据量大,但其对信息传输的实时性要求不高。在综合考虑航天器数据总线通信速率、可靠性、可扩展等要求的基础上,如何用较小的代价实现航天器平台的低速高可靠遥测数据、控制指令与图像、话音、视频、载荷试验数据、医学生理数据等高速信息的一体化混合传输,是未来载人月球探测任务中航天器信息系统设计所面临的紧迫问题。
航天器的数据总线传输速率目前的发展情况如图2 所示,目前应用广泛的Ethernet 为千兆以太网,主流的时间触发以太网(Time-Triggered Ethernet,TTE)交换设备支持的速率为千兆,时间敏感网络(Time-Sensitive Networking,TSN)产品已经支持万兆的交换速率,总线传输速率整体呈现出不断上升的趋势。CAN、1553B、SpaceWire、1394b 等总线体制存在通信速率低、支持的互联节点数量少等不足,无法满足未来航天器的大数据量实时通信需求。普通以太网具有丰富的带宽资源、良好的扩展性和兼容性,但只提供尽力而为的转发服务,无法满足航天器信息系统对实时性、可靠性和确定性通信的需求。因此工业界尝试增加额外的机制对以太网技术进行增强,例如TTE和TSN网络。
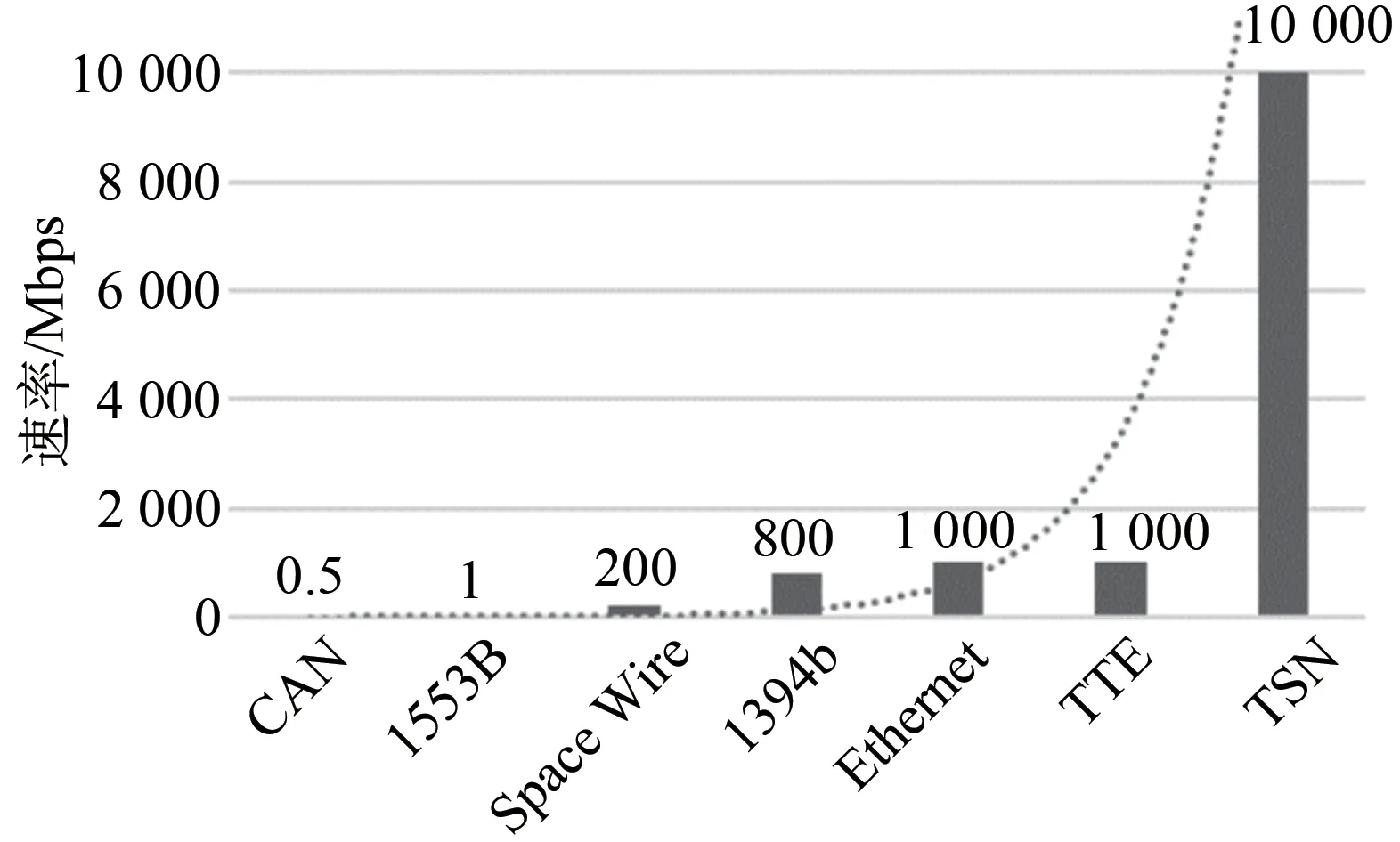
图2 航天器总线网络发展趋势Fig.2 Development trend of spacecraft bus network
2 确定性以太网技术研究进展
2.1 确定性以太网产生背景
自1973 年诞生以来,以太网技术得到快速发展,成为最有生命力的网络技术。在数据中心网络、企业网、城域网、工业控制网络中得到了广泛的应用,速率从最初的10 Mbps,已经发展到100 Gbps和400 Gbps,800 Gbps 以太网[10]接口的规范也已经开始制定。在航天领域,中国空间站中采用千兆光纤以太网传输航天员生理数据和图像话音数据,采用万兆光纤以太网[4]传输空间试验载荷数据。
以太网来源于商业应用,具有标准开放、接口成本低、管理手段成熟等优点。其优点是简单,但只提供尽力(best effort)服务,无法为应用提供“零丢失”和“确定延时”的交换服务,难以用于各类关键任务系统。因此,工业界根据不同的领域特点,提出了多种以太网增强定制方案。
1)航空以太网
随着智能化应用的发展,航空电子系统对信息传输网络的综合化、可扩展性、带宽、传输实时性、可靠性等的要求越来越高。2005 年空客公司提出航空电子全双工交换式以太网AFDX[11](Avionics full duplex switched ethernet),后成为ARINC664 标准(是美国ARINC 公司制定的航空电子标准),修改MAC 地址语义,引入虚拟链路(Virtual link,VL)区分各类业务。AFDX 将ARINC429 定义的100 kbps总线带宽提高1 000 倍,在B787、A380、C919 等型号的飞机电控系统中使用。
2)列车以太网
列车通信网络是列车上的核心子系统之一,也是列车电气传动技术体系中的关键技术。随着车载业务的发展,已有MVB/WTB 技术已经不能满足应用需求,为此,全国牵引电气设备与系统标准化技术委员会(SAC/TC278)采用IEC 标准制定了国家标准《轨道交通电子设备 列车通信网络(TCN)第2-5 部分:以太网列车骨干网(ETB)》(GB/T 28029.6—2020)[12]。ETB 修改以太网物理层,以适合列车的快速重新编组和对故障车厢的旁路,利用列车骨干网线性组网拓扑,重新设计以太网的拓扑发现、地址学习和转发表生成机制,将基于总线的WTB 技术(1 Mbps)提升100倍。
3)车载以太网
2011 年,NXP、博通和宝马携手创建OPEN(One-pair ethernet,OPEN)联盟[13]。该联盟是一个非盈利性开放行业联盟,主要由知名汽车主机厂和相关技术供应商组成,目标是将基于以太网的通信广泛应用于汽车网络。OPEN联盟成立了14个技术委员会,分别致力于制定和统一IEEE 100BASE-T1、1000BASE-T1 及1000BASE-RH 等通信方式的物理层、协议一致性和互操作性等规范;同时通过制定线束、交换机、ECU 和其他功能需求及测试规范,帮助Tier1 和汽车制造商完善汽车以太网生态系统,如TC8 委员会制定的ECU 级别物理层、数据链路层、TCP/IP 协议层、SOME/IP 测试规范,TC2 制定的汽车线束和接插件的测试规范。OPEN 联盟将以太网应用于汽车网络,基于车载以太网只需传15 M的需求,简化以太网物理层,将100 M以太网的传输由两对双绞线变为一对,将CAN等车载总线带宽提升100倍。
作为以太网标准制定的组织,IEEE 发现各种行业定制以太网后带来的问题:①以太网技术分裂,每个领域根据特定需求对以太网技术进行裁剪或者增改,制定相应的行业标准,使得以太网技术难以保持通用性的特征;②知识产权问题,用户被领域内供应商锁定,这与以太网技术开放性的初衷相悖。为此,2012年IEEE 802.1工作组成立TSN 任务组,开始TSN标准的制定。
2.2 时间触发以太网简介
2.2.1 工作原理
时间触发以太网由时间触发协议(Timetriggered protocol,TTP)技术发展而来[14],面向封闭网络环境,采用容错全局时间同步、离线规划、资源预约、时间感知整形等机制。基于时间触发以太网的混合流量交换示意如图3所示。
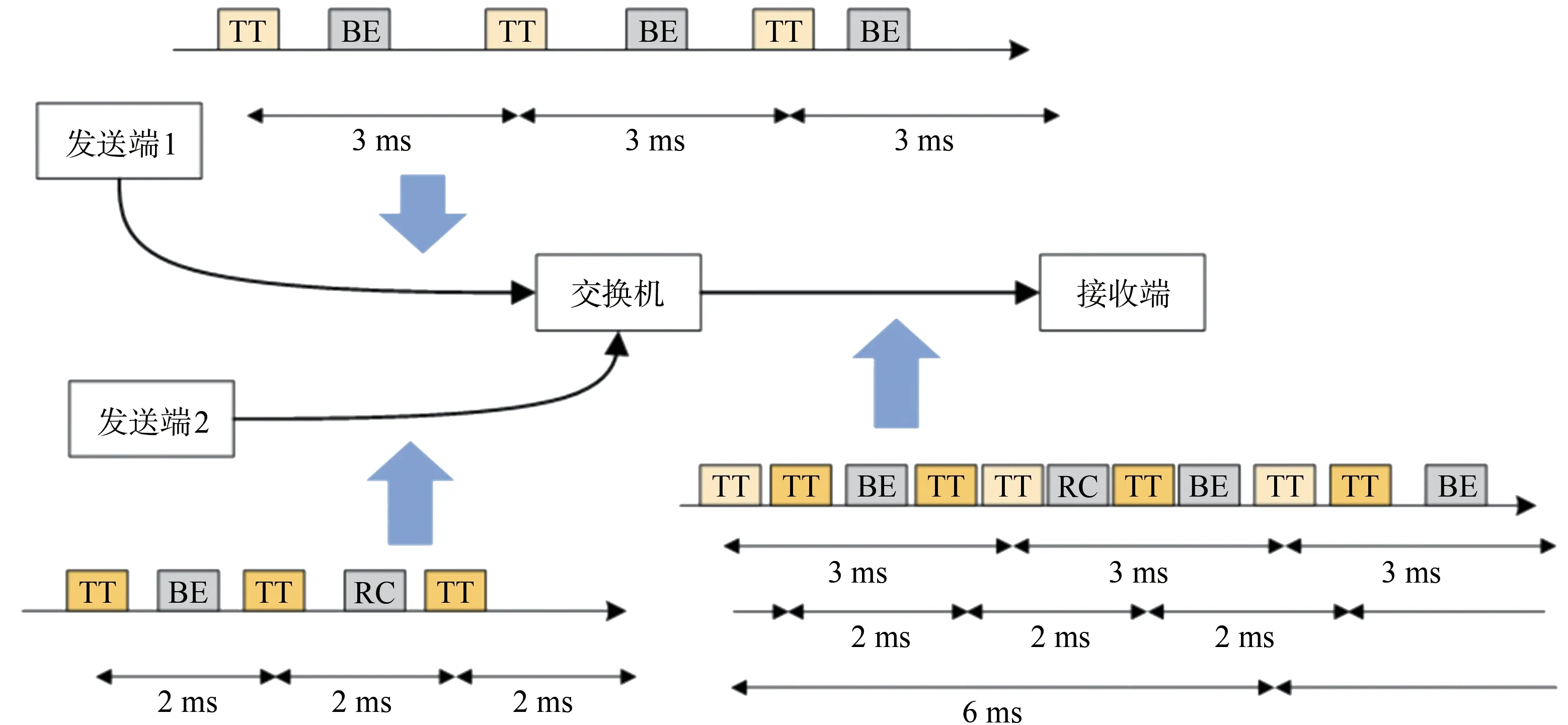
图3 基于时间触发以太网的混合流量交换示意图[15]Fig.3 Basic Principals of Time-Trigger Ethernet[15]
TTE 使用的时钟同步协议具有较强的容错能力,将网络设备划分为3 类:同步主机(SM),压缩主机(CM)以及同步客户端(SC)。其中SM 和CM 是时钟质量较高的设备,主动参与同步校正值的计算;而SC 是时钟质量较差的设备,只能被动接受同步。同步过程包含两步:第1步是所有的SM 在本地时间为0的时刻向CM发送同步帧,CM收到所有SM的同步帧之后进行本地时钟校正值的计算,修正本地时钟;第2 步是CM 将所收到帧压缩并回复至所有的SM和SC,SM和SC在收到压缩帧之后利用该帧计算校正值并修正本地时钟。协议中使用了容错握手机制,基于滑动窗口的容错均值算法和结团检测机制等容错方法,使正常设备能够在系统内出现错误的情况下依然保持同步。
TTE 将网络中的流量划分为3 类:时间触发(TT)流量、速率限制(RC)流量以及尽力而为(BE)流量。其中TT 和RC 流都是需要预先离线规划,具有确定的端到端延时的上界和下界。每个设备会为不同类型的帧分配不同的缓冲区。离线规划每个帧的发送时间,以时间触发的方式发送,控制“关键帧”的端到端的延时。
2.2.2 标准体系及应用
2011 年,国际自动机协会(SAE)将美国霍尼韦尔和奥地利TTTech 公司的TTE 技术制定为AS6802标准[15],核心是拜占庭容错的时间同步以及时间触发调度。除了时间同步,其他关键技术没有公开的标准和规范。
2019 年,美国(NASA)、欧洲(ESA)、加拿大(CSA)、日本(JAXA)和俄罗斯(Roscosmos)等国际空间站成员单位,面向深空探测中不同航天器间的互连协作需求,共同制定以TTE 为核心的国际航电系统互操作标准IASIS(International avionics system interoperability standards),将TTE 作为下一代航电系统集成的框架。
TTE 总线技术已应用于国际上的多项航天任务,例如分别于2014年12月、2022年12月完成地球轨道和月球轨道无人飞行验证的美国猎户座载人飞船使用18 块TTE 交换卡组成三平面冗余的交换架构,共连接46 个端节点,使得通信带宽比原有系统提升了1 000 倍[16]。欧洲ESA 的下一代重型运载火箭阿丽亚娜-6 的信息系统也采用TTE 网络构建;此外NASA 的月球“门户”(Lunar Gateway)计划采用TTE作为骨干网络[17]。
中国对TTE 的研究起步较晚但发展迅速,有关院所已启动相关研究工作。2020 年我国发射的新一代载人飞船试验船对“时间触发以太网星载原型系统”进行了在轨试验[18],实现了时钟同步、高清图像传输等功能。
2.3 时间敏感网络简介
2.3.1 工作原理
时间敏感网络的设计目标是在兼容现有以太网标准基础上,通过增加时间同步、资源预约和整形调度等机制[19],在“一张网”上支持混合流量的传输,其工作原理如图4所示。
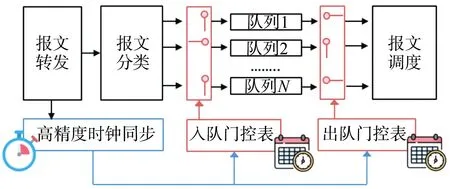
图4 时间敏感网络工作原理示意图Fig.4 Basic Principals of Time-Sensitive Networking
TSN 定义的混合流量包括三类:1)ST(Scheduled traffic)流量,即离线规划发送时刻的周期性流量。该流量通常为传感器产生的状态以及发送给执行器的指令等,ST 流量类似TTE 中的TT流量;2)AVT(Audio/Video traffic)流量,主要为音视频或雷达、相机等产生的传感数据等,该流量没有周期性,对带宽的要求较高,类似于TTE 中的RC 流量;3)BE(Best effort)流量,目前以太网提供的尽力服务流量。
TSN 保证交换过程中ST和AVT 流量“零丢失”,ST 具有确定的端到端延时上下界,AVT 流量具有可接受的延时上限。在所有网络设备上增加时间同步功能,为不同类型的帧分配不同的输出队列。离线规划每个输出队列“打开”和“关闭”时间,控制“关键帧”的端到端的延时。
2.3.2 TSN标准体系及应用
TSN的标准体系主要围绕“延时确定性”[20]、“可靠性”[21]、“时间同步”[22]和“可管理性”[23]四个方面进行。目前802.1 TSN 工作组已发布十多项标准,还有更多的标准在制定中。
TSN包含5个最核心的标准(见表1):①802.1AS定义了TSN 时间同步的标准,采用广义精确时间同步协议(gPTP)确保网卡和交换机之间实现亚微秒级的时间同步;②802.1Qbv 采用时间感知整形器(TAS),确保ST 帧在预先规划的时刻从接口发送;③802.1Qav 采用基于信用值的整形器(CBS),控制AVT 流量使用的带宽符合预约要求,同时减小突发性;④801.1Qci 采用帧过滤与报错(PSFP)机制,确保每条ST流按照规划的时刻发送,每条AVT流使用的带宽符合规划的要求;⑤802.1CB 实现关键流量传输的无缝冗余,通过帧复制和消除(FRER)机制确保为应用提供零丢失的传输服务。
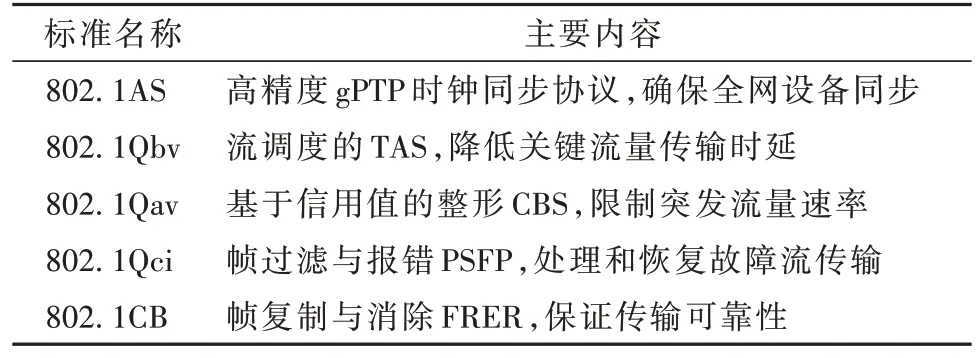
表1 TSN核心标准Table 1 The core standards of TSN
由于TSN 面向的场景涵盖航空航天、轨道交通、车载、移动通信和工业控制网络等,每个场景对TSN 实现的功能和性能要求不同,因此TSN 还制定了各领域的使用规范,例如802.1CM 定义了TSN 在移动前传网络中使用的规范,802.1AB 定义了TSN在音视频传输领域使用的规范。
2021 年,空客、通用电气、波音、科林斯等公司的TSN 专家完成了TSN 航空航天领域的应用规范(802.1DP)草案的编写,详细分析了各类航空航天器对TSN 交换的需求,提出了对TSN 实现的功能和性能要求,为推动TSN 在航空航天领域的应用奠定了基础。
2022 年,NASA 在802.1DP 工作组的报告中指出,由于TSN 具有开放的标准和更好的生态,会替换TTE 成为航天器网络未来发展的趋势[24]。波音等公司也在积极开展基于TSN 的星载网络研究,通过统一的TSN 网络融合星上的载荷网络和平台网络,取代1553B 和SpaceWire 等总线[25]。欧空局的“Miura-1”可重复使用探空火箭航电系统中的骨干网络采用了TSN[26],已于2023 年10 月7 日完成首飞。中国相关部门也已经计划开展TSN 交换的搭载试验。
2.4 TTE和TSN比对分析
从采用的技术路径来看,TSN 是在传统以太网的基础上通过“打补丁”的方式,提升以太网交换的确定性,因此TSN 仍然保留了“队列调度”的特性。而TTE 则仅仅是继承使用以太网物理层和MAC 层标准,构建了全新的基于帧的调度机制。
TSN 和TTE 对比分析如表2 所示。TTE 具有较强的安全性和容错能力,更适合闭环确定性网络场景,但其技术本身不够开放,核心专利技术都由美国的霍尼韦尔和TTTech公司所有,限制了生态的发展;TSN 是开放技术,但标准体系复杂,在面向具体行业领域实现时需要裁剪和定制,考虑到空间应用对高可靠性的需求,TSN 的容错机制尚不完善,此外,TSN相比TTE具有更高的通信速率,在高速率数据传输场景下更具有优势,能实现更灵活的组网应用。
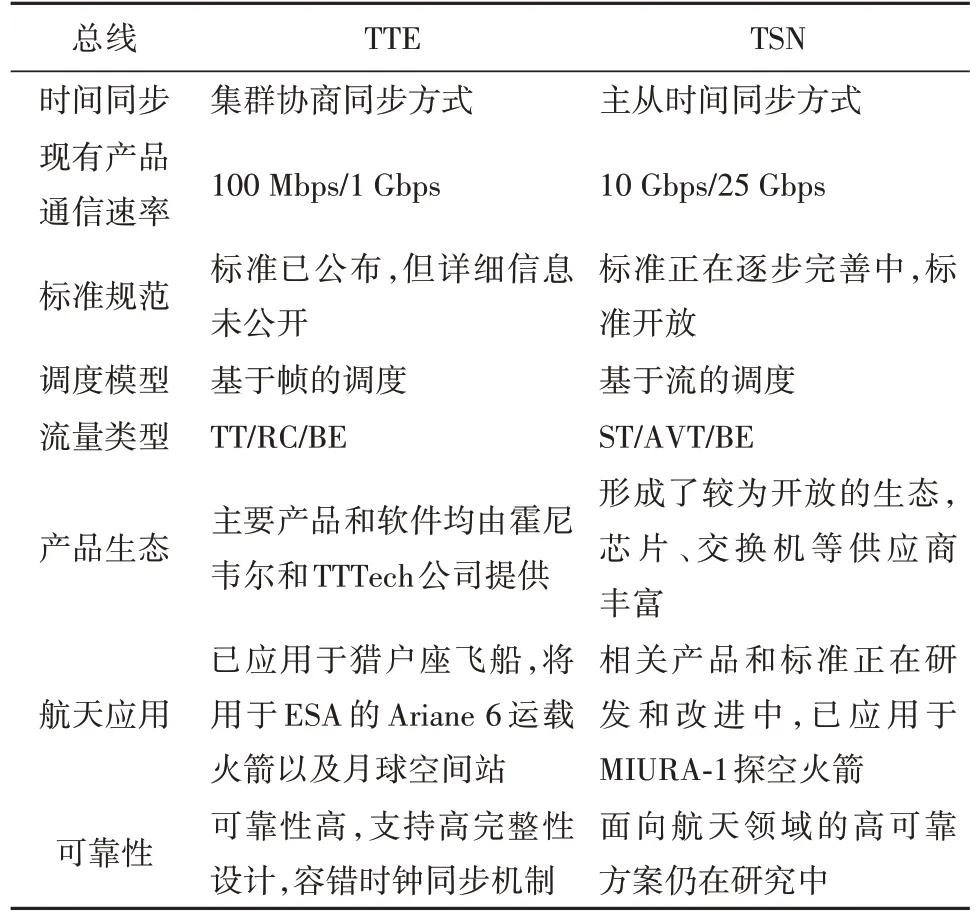
表2 TSN和TTE对比分析Table 2 Comparative analysis of the TTE and TSN
3 确定性以太网关键技术
3.1 深亚微秒级的容错时钟同步技术
容错时钟同步协议能够保证系统内的非故障节点不受故障节点的影响,依然保持同步。对容错时钟同步协议的研究包括初始化阶段和同步阶段两个方面,前者解决的是系统启动之后,在各个节点本地时钟完全随机的混乱条件下建立初始同步的问题,后者解决的是由于晶振实际频率误差导致各个节点本地时钟在运行过程中不断偏移的问题。
1)同步初始化
文献[27]提出一种面向汽车和航天器场景的容错时钟同步初始化的通用解决方案。该方案通过扩展TTP/C 中“集中守护(Central guardian)”的语义,要求守护实例需要具备语义正确性判断以及过滤的功能,并能够与系统内的其他守护实例进行直接互联,从而能够获取不同冗余通道的信息。系统内除了守护实例的其他节点交互的信息都需要经过守护实例,因此守护实例能够建立全局视野,监测是否有故障发生,并进行故障的隔离与恢复。在该解决方案中,系统对故障的容忍依赖于集中守护实例的正确执行,这会使系统受集中守护实例单点故障的困扰。
AS6802中的同步初始化方法与上述方案类似,在初始化阶段,系统中的同步主SM 节点会周期性地广播冷启动帧,尝试让其他SM 与自己时钟对齐;压缩主CM 在接收到一个或者多个CS 帧之后,会随机选择一个帧然后广播至网络内,将该帧的发送者的本地时钟作为冷启动阶段的时间基准。这种方法也会受限于压缩主CM 的可靠性和冗余数量,并且由于设备的时钟角色都是在系统运行前静态配置的,在系统遭遇故障时,活性会被削弱,即缺少动态修改配置以应对故障的机制[28]。
802.1 AS 中的同步初始化基于最佳主时钟选举算法(Best master clock algorithm,BMCA),网络中的设备会周期性广播包含描述自己本地时钟质量的Announce 报文,接收到其他设备Announce 报文的设备会对比自身与该报文发送者的时钟质量,如果更优则继续广播自己的报文,否则转发收到的报文,直到网络中选拔出一个新的最佳主时钟。这个算法在规模较大网络的实际运行过程中会持续较长的时间,影响系统运行的效率,因为在初始化阶段未同步,各种时间敏感应用均不能够开始运行。
2)周期性同步
文献[29]认为典型的分布式容错时钟同步通常经历三个阶段:第一阶段,每个节点通过消息交换获取其他节点的本地时钟的时间信息;第二阶段,每个节点分析收集的时间数据,过滤错误,并且执行收敛函数计算本地时钟的校正值;第三阶段,利用计算的校正值修改本地时钟的值。目前不同的容错时钟同步算法的区别仅在于:从其他节点收集时间信息的方法、所使用的收敛算法以及将校正值修改到本地时钟的方法。
在周期性同步阶段,AS6802 能够容忍的故障假设是单点故障(一个端设备的随机故障或者一个交换设备的遗漏-不一致故障)和双点故障(两个设备的遗漏-不一致故障),主要的容错机制包括基于滑动窗口的容错均值算法,CM 冗余双通道以及COM-MON 机制等。802.1AS 能够容忍的只有主时钟GrandMaster 的静默故障,当从时钟长时间未进行同步,便采用BMCA算法尝试更换主时钟。
3.2 确定性端到端时延的流量调度技术
确定性端到端延时的流量调度技术涉及流量规划问题的系统模型和混合流量的联合调度策略。由于确定性以太网规划问题与底层调度机制紧密相关,因此,本小节将介绍确定性以太网底层调度机制,并从流量规划问题的系统模型和混合流量的联合调度策略两方面进行阐述。
1)确定性以太网底层调度机制
时间感知调度器由IEEE 802.1Qbv 标准提出,其核心技术是基于网络全局时间的门控机制(Gate control)。时间感知调度器规定,不同优先级的流量进入不同优先级的队列,ST 报文享有专用的ST队列,如此,ST 报文在空间上与其他优先级的流量形成隔离。全局同步时间被划分为等长的时间槽,位于每个队列末端的“门”在全局时间和门控列表(Gate control list,GCL)的控制下,在不同的时间槽执行打开或关闭操作。
不同流量使用不同的时间槽,ST 流量能够在其专用的时间槽被调度输出,流量在时间维度上形成隔离。所有关键流量周期的最小公倍数被称为调度周期(以时间槽为单位),调度周期不能超过GCL表的深度。
利用时间感知调度器,确定性以太网采用时间触发通信的方式保证ST流严苛的服务质量要求,确定性以太网的工作流程大致可划分为三个阶段:规划阶段、时间同步阶段和调度阶段。网络节点能够在预先计算好的发送时间调度发送ST流,在空间维度和时间维度达成全网无冲突的ST 流传输,使ST流的服务质量得到保证。TSN规划器的工作就是在规划阶段为ST流进行网络资源规划和预约。
2)流量规划问题建模
目前规划问题的模型大致可以分为两类:基于帧的规划模型[30-33]和基于窗口的规划模型[34-37]。两种模型的本质区别在于有无时间框架与ST 队列是否能调度多个报文。基于帧的规划模型遵循时间感知调度器划分的时间槽,将等长的时间槽作为规划问题的时间框架,数据帧的发送时间必须与时隙对齐;在任一时隙内,TSN 节点输出端口的某个ST队列内至多只能调度一个数据帧。基于窗口的规划模型不设定时间框架,数据帧的发送可以从任意时刻开始;在任一时刻,TSN 节点输出端口的某个ST队列能够调度多个数据帧。
基于规划模型,TSN 规划问题的约束可以分为两类:技术约束与用户约束。其中技术约束受TSN交换机底层资源的限制,用户约束受流量需求的限制。
3)混合流量联合调度策略
随着高端装备平台的智能化,平台中的AVB 流逐渐增多。例如,随着自动驾驶系统的发展,超高清摄像头、毫米波雷达等设备被引入车载系统。这些设备传输大量未经处理的原始流量,要求高带宽以及较低的延时。因此,规划器在为ST流量计算调度计划,为ST 流量提供有界的延时和抖动保证的同时,还需要使调度计划满足AVB流量的软实时要求。
近年来,关于兼容AVB 流与ST 流研究的主要思想是在ST 流量的调度计划中增加更多的空白时隙,用于调度AVB 流量。相关文献主要解决两个问题,第一个问题是如何在ST调度计划中插入空白时隙,使得ST 流的硬实时不被干扰;第二个问题是用什么指标评估ST 调度计划的质量,即对AVB 流的友好程度。
文献[38]在TTEthernet 的规划问题中首次提出调度孔隙的概念,调度孔隙即TT 流(等价于TSN 的ST 流)调度计划中未被TT 流占用的空白时隙。文章认为,空白时隙的长度、数量和位置会影响RC 流(等价于AVB流)的最坏情况延时(Worst-case delay,WCD),均匀的空白时隙有利于降低RC 流的WCD。该文献提出三种在ST 调度计划中插入空白时隙的方法,第一种是先验的,在已有的规划问题约束的基础上增加约束,使TT 流的发送时间避开某些区间,这样能够在调度计划生成的过程中增加空白时隙。第二种方法是后验的,即修改已有约束中的某些参数,使已有约束更为严格,方便在调度计划生成之后增加空白时隙。第三种方法是在调度计划与GCL表项的映射过程中,将时间槽划分为TT阶段和RC 阶段,RC 阶段只允许传输RC 流。文献[38]的不足之处是没有提出一个表达式,用于描述TT调度计划的质量。
类似于文献[38],文献[39-42]认为均匀的空白时隙对RC 流的WCD 更有利。文献[39-40]在TT调度计划中插入空白时隙的思想类似于文献[38]的第一种方法,并提出直接使用RC 流的WCD 作为评估TT 调度计划质量的指标。虽然使用AVB 流或RC 流的WCD 作为衡量指标是最直接的方式,但是WCD 的估计非常耗时,这将会使调度算法的运行时间变得无法接受。同时,如果RC 流的WCD 过于悲观,可能会导致无解。文献[41]采用“基于帧的”调度策略,在增量调度的SMT 中集成网络微积分(network calculus),方法大致如下:①使用SMT 获得初始调度计划;②判断该调度计划是否能满足RC流的WCD,满足则结束;③如果不满足,选取一条对RC 流影响最大的TT 流;④使用SMT 重新为该TT 流计算一个发送时间,回到②。此外该文献提出指标gain,用来描述正在调度的数据帧的发送时间t与已调度数据帧的发送时间t’之间的关系,t与t’的距离越近,gain 呈线性下降,反之则线性上升。gain 用以指导SMT 重新计算当前数据帧的发送时间(即步骤④),最终目标是使gain的值最大化。文献[42]为了给RC流留下更多空白时隙,提出“使TT流传输窗口重叠”的思想。由于窗口重叠,TT 流可能会产生冲突,需要使用网络微积分计算TT流的WCD。
4 确定性以太网技术思考与展望
4.1 确定性以太网发展趋势
国内多个单位在TTE 研究和产品研制方面具有深厚积累,通过近十年的技术积累,已有自主产品,但在互连互通和集成测试方面还存在不足,预计在2030年前TTE还是很好的选择。
目前TSN 正处于起步阶段,各项应用领域的规范依然在讨论和制定中,预计“十四五”末会逐渐成熟,在未来的装备平台上TSN将会发挥更大作用。
TSN 总线技术处于快速发展阶段,相关标准研究也在稳步推进,有广阔的发展前景,有望成为未来工业领域的骨干网技术,受到航空航天、智能驾驶等领域的广泛关注[43-44]。其未来的发展趋势主要体现在以下几个方面:
1)TSN安全性研究
未来TSN 网络在关键系统设备中产生的数据越来越多,同时其开放的系统架构也增加了网络受到外部攻击的可能性。虽然TSN 提供了过滤突发数据帧的相关协议,但对传输数据的安全性和完整性方面缺少保护机制,有必要开展TSN 网络中传输数据的安全性和完整性研究。
2)TSN与无线技术相结合
无线网络设备可灵活部署,将5G、Wifi 等无线通信技术与TSN 网络相结合,构建有线和无线集成的实时工业物联网,实现从有线到无线的全覆盖支持,将为未来构建灵活高效、柔性的工业互联网奠定基础,目前已成为一个研究热点。
3)TSN网络管理与控制
TSN 网络需要传输不同优先级的混合流量、配置网络设备的时钟同步,因此需要对网络设备的同步状态、关键流量的运行状态进行实时监测,这就对TSN 网络的管理和控制架构的灵活性、实时性和可扩展性提出要求。
4.2 推进TSN空间应用的建议
为使TSN 总线技术更好地适应航天领域信息系统网络的应用场景,需从以下三个方面进行增强。
1)加强TSN时间同步的容错能力
与总线不同,以太网在时间同步分组交换过程中,由于需要对报文中的修正域字段进行修改,端到端的CRC 保护无法实施。例如在充斥着高能粒子辐射和混乱电磁场的空间环境中,交换机可能发生单粒子翻转等故障,最终可能造成时间同步分组携带的信息产生错误,无法维持稳定的同步,导致关键流量无法按照规划的时刻进行发送和接收。而TSN现有的802.1AS时间同步标准采用的是主时钟向从时钟授时的同步模式,不支持容错,协议的可用性受限于主时钟的单点故障,因此需要加强对TSN时间同步容错机制的研究。
2)加强标准和规范的制定
TSN 规范在制定的过程中,需要考虑对传统以太网标准的兼容性,因此TSN 规范存在大量实现“选项”。例如802.1CB 规范中就定义了4种标识流的选项,同时实现4种选项导致花费大量的资源,提高了研制成本。又因为TSN 没有标准必要专利,相同的标准可能存在多种实现方式,例如802.1Qbv在高优先级被低优先级帧干扰时,可采用帧抢占、干扰等待、最大保护带设置和动态保护带设置4 种方式,采用不同实现方式的芯片无法互连互通,这就需要进一步加强标准,特别是工程标准的建设,减少实现的选项,明确实现机制,避免使用可选项的描述。
3)加强集成测试能力建设
TSN 支持时间同步帧、BE 流量、AVT 流量和ST流量在同一套网络中交换,不同流量对延时和带宽的要求不同,采用不同的队列缓存和整形机制,因此流量的QoS保证比传统以太网复杂很多。特别是ST 帧的转发行为与全局同步精度相关,相邻设备在转发ST 帧时在时域上产生的微秒级误差可能导致该帧在传输路径中的某设备上因错过发送窗口被丢失,故障定位难度很大。
5 面向载人月球探测的确定性以太网应用构想
目前,TSN技术仍处于不断更新和发展的阶段,面向航空航天领域的802.1DP 标准也在讨论和编撰中。由于在容错方面存在不足,TSN 尚不能真正完全应用于载人航天器总线通信系统。
本文提出面向载人月球探测的确定性以太网的“两步”发展思路:第一步首先将TTE 与TSN 融合在总线通信系统的架构中,利用TTE 高可靠和容错特性满足安全关键的需求;第二步借鉴TTE 容错和可靠性设计对TSN 技术进行增强,使其能够完整、独立地应用于载人航天器总线通信系统的设计。
5.1 TTE和TSN融合架构
TTE 和TSN 融合架构的思路是使用TTE 连接关键的核心部件,外围非关键部件(如载荷系统)之间采用TSN连接,如图5所示。

图5 航天器TTE和TSN相结合的总线架构Fig.5 Bus architecture combining spacecraft TTE and TSN
载荷数据通过载荷管理器与TTE 交换机交互,由载荷管理器作为边界设备实现TSN和TTE接口的转换。但由于TTE 和TSN 在容错时钟同步、流量规划与调度等关键技术的细节上有所不同,二者在融合的过程中需要根据这些区别建立统一的模型。
1)容错时钟同步。TTE 采用集群压缩的时钟同步方式,而TSN 采用主从时钟同步方式,两种方式具有不同格式的同步报文和本地时钟表示方法。解决上述差异的思路是TTE和TSN网络的边界设备上同时运行TTE 和TSN 的时钟同步,如图6 所示。边界设备在TTE同步中作为SM参与同步,在TSN同步中作为主时钟GM 向下级设备发布同步时间,两个独立的同步域分别传输不同的时钟同步报文。
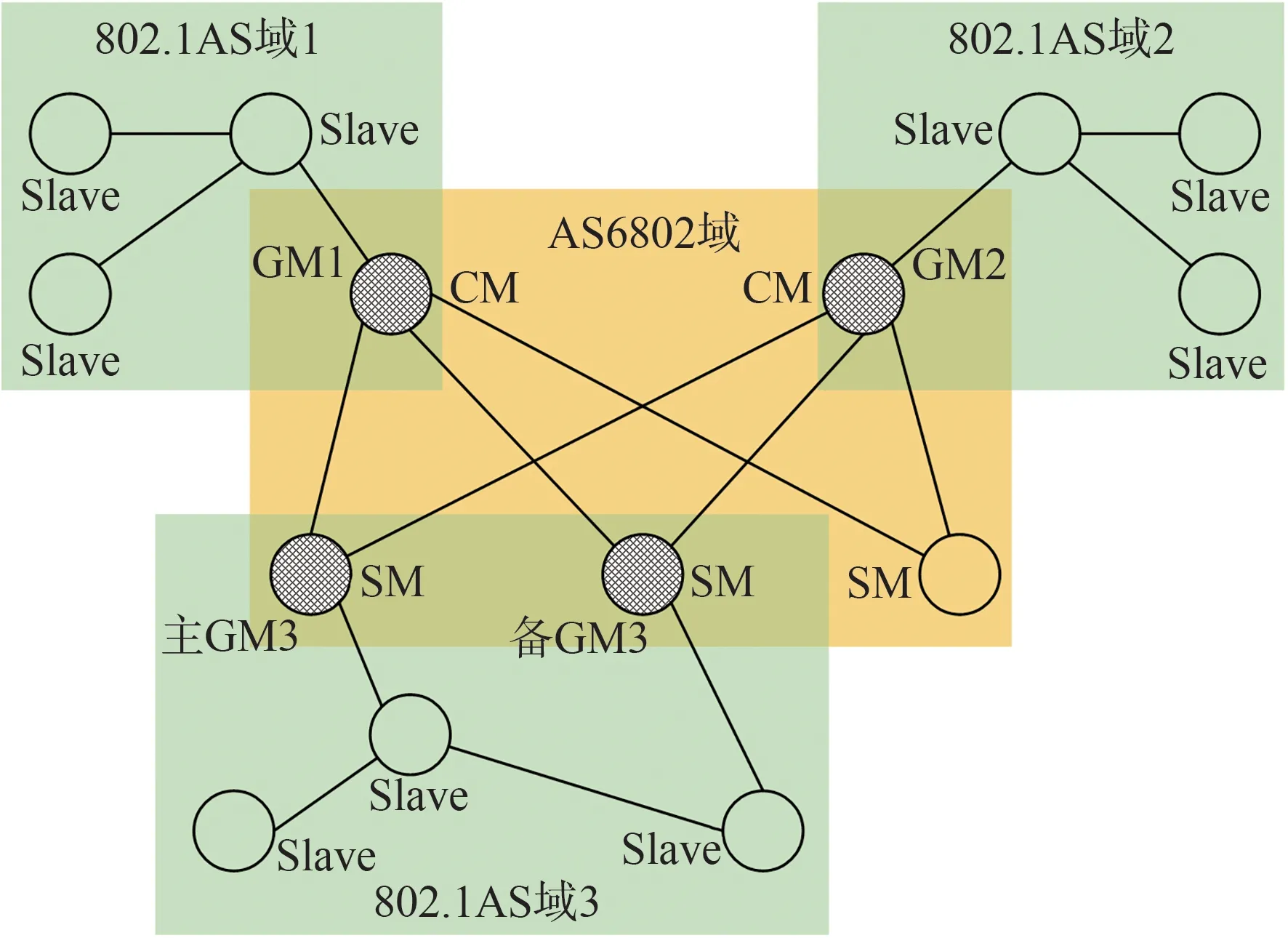
图6 TTE和TSN时间同步融合架构Fig.6 Clock synchronize architecture combining TTE and TSN
2)确定性流量调度。TTE 中将流量划分为TT/RC/BE 三种类型,TSN 中流量划分为ST/AVT/BE,因此首先需要解决流量在跨TTE与TSN域的流量类型映射问题。其次,TT 流与ST 流都是需要预先规划的流量类型,但TTE和TSN的规划模型不同,进而导致规划算法输入的约束条件也不同,因此该架构下的流量调度需采用一种兼容两种规划模型和约束的规划器。
5.2 增强TSN架构
在第一步的基础上,借鉴TTE 的容错机制,提升TSN 的可靠性设计,最终实现能够完全符合安全关键场景的“增强TSN 架构”,作为未来航天器总线通信系统的核心技术。如图7 所示,航天器平台设备和载荷设备均通过TSN交换机实现数据交互。
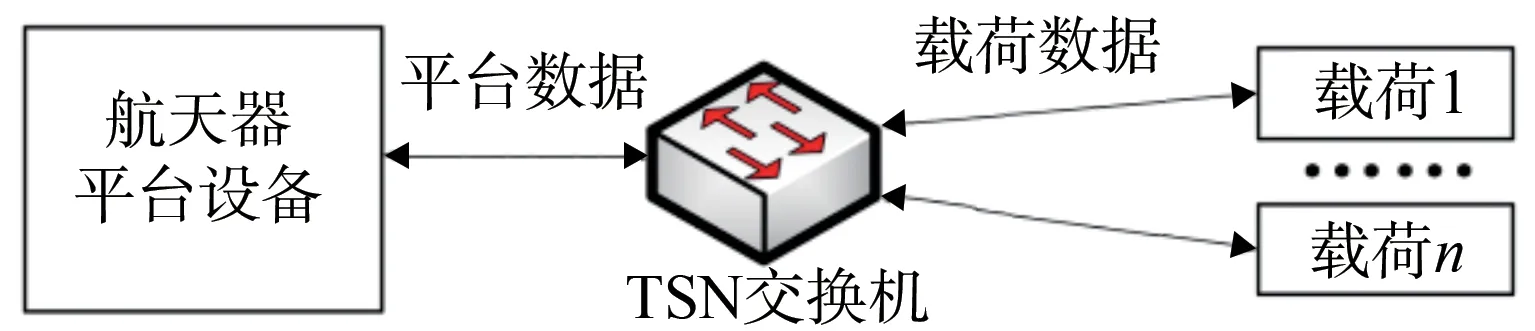
图7 航天器TSN总线架构Fig.7 Spacecraft TSN bus architecture
1)容错时钟同步。为提升TSN 时钟同步可靠性,首先需要解决主从同步架构下主时钟的单点故障对系统的影响。现有时间同步标准中,主时钟采用的基于最佳主时钟选举算法的配置手段,通过交互特定类型的报文自动地配置单个主时钟。该方法在主时钟出现故障的情况下,需要秒级的故障恢复时间,在恢复过程中整个网络由于处于异步的状态无法正常进行数据传输。考虑到可靠性需求以及数据传输效率,应对该功能进行裁剪。在最新版本的802.1AS时间同步中,描述了冗余同步主时钟、冗余同步路径的应用场景,利用该特性在网络中静态配置多个主时钟(如图8 所示),主时钟之间运行类似于TTE 的分布式容错共识算法实现同步,保证当其中存在故障主时钟时,其余主时钟能够不受影响,并且无缝接管故障主时钟所在同步域内的其他网络设备。
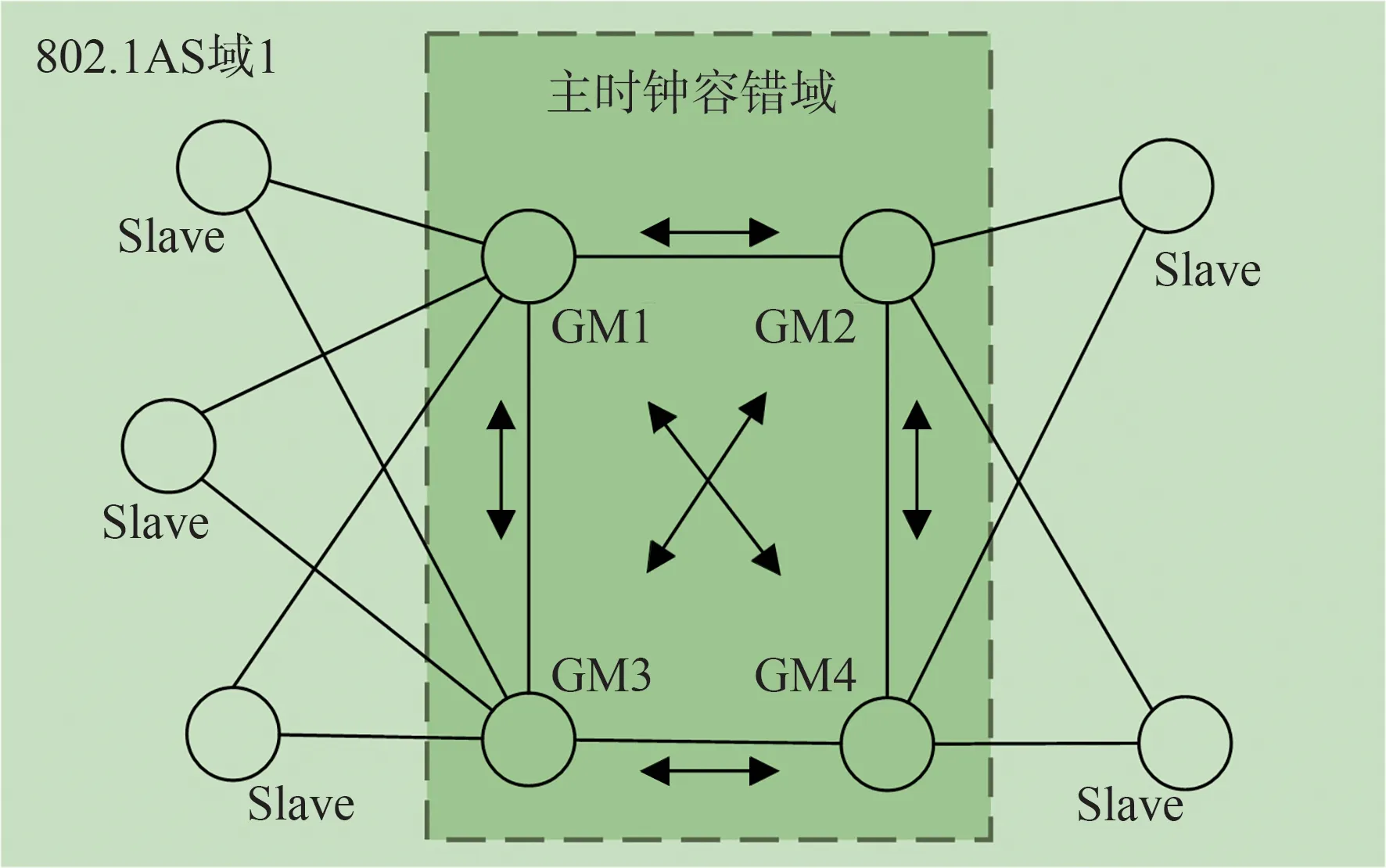
图8 TSN容错时间同步架构Fig.8 The architecture of fault-tolerant clock synchronization in TSN
2)确定性流量调度。由于架构上已经统一为TSN 流量调度,因此只需要按照802.1Qbv 等调度相关的标准进行实现与优化即可,在实现过程中需要首先解决TSN 规划模型与底层调度机制的一致性问题。在全面考虑TSN 底层调度机制资源抽象的基础上,将ST队列深度和门控列表表项深度作为约束条件进行求解,使得调度规划结果能够完全适配TSN调度机制。主流的TSN规划模型分为基于帧的和基于窗口的模型,由于前者无法将门控列表表项深度作为约束,后者没有考虑ST 队列深度约束,两种规划模型的输出结果均难以适配底层的TSN 交换机,或真实地指导底层的流量调度,导致规划算法难以真正在航天器信息传输场景中得到应用。
5.3 小结
通过确定性以太网“两步”发展思路,使TSN 技术可以应用于载人月球探测航天器信息系统的设计与实现,从而解决由于传输数据量大、数据类型复杂、传输实时性以及确定性要求高导致的传统总线技术无法满足传输需求的问题,为航天器的智能化应用提供高可靠、低时延的通信服务。
6 结束语
面向航天器信息系统数据总线的高带宽、高可靠、低时延和轻量化设计要求,传统的1553B、CAN等总线体制已无法满足未来信息系统数据总线技术的需求,采用一套数据总线实现器内高低速数据的一体化混合传输已成为必然趋势。各种新兴的高速总线不断涌现,其中以TTE、TSN 总线为代表的确定性以太网总线在高带宽、可扩展等方面最具有发展前途,为未来航天器信息系统的设计提供了可选方案。
目前TTE 总线已应用于飞船、飞机和汽车等领域,可作为未来航天器的骨干总线选择方案,但是技术较为封闭;TSN总线在工业界已开始应用,具有良好的技术和产业生态,代表未来的发展方向,但现阶段在航天领域的应用仍面临容错能力不足、标准规范复杂和集成测试能力薄弱等问题,后续需针对上述问题进一步开展完善和增强工作。基于上述分析,我国载人登月航天器信息系统总线技术可以先采用TTE 和TSN 融合的架构,而后等待TSN 增强后能够满足安全关键场景需求时再采用完整的TSN架构。
猜你喜欢
国际太空(2022年7期)2022-08-16
少儿科学周刊·少年版(2022年19期)2022-05-30
装备制造技术(2020年1期)2020-12-25
国际太空(2019年9期)2019-10-23
国际太空(2018年12期)2019-01-28
国际太空(2018年9期)2018-10-18
电子制作(2017年24期)2017-02-02
太空探索(2016年12期)2016-07-18
太空探索(2016年9期)2016-07-12
太空探索(2016年6期)2016-07-10