基于横向剪切干涉系统的液膜厚度分布检测
2024-03-18 08:58盛稳余波郭晗周怀春
化工进展 2024年2期
盛稳,余波,郭晗,周怀春
(1 中国矿业大学低碳能源与动力工程学院,江苏 徐州 221116;2 江苏省智慧能源技术及装备工程研究中心,江苏 徐州 221116)
涂层技术在航空航天[1]、电子光学器件制造[2]、医疗生物[3]等多个领域中被广泛应用。在浸涂排液过程中,表面液膜的形成过程直接影响到涂层工艺的质量。通过对自由液膜的排液过程进行研究,可以深入了解液体在浸涂工业中的排液行为和相互作用规律,为涂层技术升级提供科学依据和技术支持[4]。厚度作为最基本的物理特征之一,准确测量对分析液膜的稳定性和流动性具有重要意义。由于液膜厚度相对较小且易受环境变化影响,对其进行高精度、快速测量比较困难。目前液膜厚度测量方法主要分为接触式和非接触式两种。由于探头与液体的接触改变了局部厚度分布与速度场,甚至破坏液膜的结构,因此接触式测量通常运用于液膜区域面积较大的测量[5]。而非接触式测量,无需与被测液膜直接接触即可得到厚度的全场分布。针对区域面积、厚度相对较小的液体薄膜,尽管可以使用超声波[6]、辐射波[7]技术进行测量,但由于声波波长对厚度测量的限制,非接触式测量技术更多的研究还是偏向于干扰性更小的光学方法。
常见的光学方法主要包括光衰减法[8]、光学反射法[9]、干涉法[10]等。Dupont等[11-12]采用光衰减法分别对竖壁上自由下落液膜和静态液膜厚度进行了测量。但由于测试时需对薄膜厚度和光衰减之间的非线性关系进行校准,这无疑增加了光衰减法的测量难度。此外,光学反射法虽然也是一种可行的测量技术,但反射率对液膜表面条件和厚度的依赖性较强,且容易受到环境光干扰,进而影响测量的准确性[13-14]。在光学方法中,基于干涉测量的方法已被证明是最适用的。这是因为它们采用光的波长作为基本长度尺度,不需要额外的校准;其次,光学干涉技术直观性好,抗扰动性强,可用于测量不同类型和性质的液膜[15-16]。Ohyama 等[17]开发了一种基于干涉法的光学设备,可对10μm~1mm 透明(或弱吸收)固体材料或液体的瞬时均匀厚度进行实时测量。Chen等[18]采用部分相干干涉测量法准确测量了玻璃样品、静态乙醇膜等已知规格的液膜厚度。一些研究虽涉及液体以外的透明薄膜,但二者之间的相似性可直接扩展到液体薄膜厚度的检测领域[19-20]。然而,上述方法大多只能测量液膜局部位置的厚度,且测试对象多为上下表面比较平滑、含有固体基体支撑的液体薄膜。
针对上述液膜测试技术存在的问题,本文提出一种基于传统剪切干涉法改进后的横向剪切干涉技术,在不受液膜表面波动的影响下可对全场厚度进行无接触、精确实时测量检测。相比其他光学干涉法[21-25],该技术在液膜厚度检测方面不仅具有抗扰动强、组建调试简单、实时测量的优越性,较少的光学器件和系统输出的简单条纹也大大简化了测量过程的复杂操作和对后续数据处理的难度。同时,对不同形状、不同种类液膜的厚度测量具有广泛的适用性,包括亚微米、微米甚至纳米级的液膜。面对自由液膜排液过程中液膜不稳定、厚度变化快且分布不均匀的特点,应用该技术测量得到了全场液膜厚度分布和时间演变,为涂层工艺分析优化、软物质领域[26]研究提供了实验分析方法。
1 研究方法与原理
1.1 平面液膜拉伸实验
根据实验流程和目的,本文主要分为平面自由液膜拉伸成型和液膜厚度分布检测两个部分。由于纯净水的表面张力较大,水分子之间存在较强的相互作用,液体更容易形成水珠以减小比表面积而降低体系能量[27]。因此,当支撑液膜的固体基体不存在时,在空气中形成稳定的平面自由液膜比较困难。为了解决这个问题,本文首先采用了一种液膜拉伸实验装置,该装置可形成能够保持较长时间稳定形状的理想液体薄膜。装置示意图如图1所示,主要由样品台、升降系统、金属框架、高精度力学传感器和计算机等组成。其中,固定液膜的金属框架使用水润湿性较好的铂金丝(半径r=0.3mm)材料制成,通过框架上方固定的挂钩与力学传感器连接并悬挂。装置的下方升降系统与样品台相连,可以通过改变伺服电机的转速,使得样品台在竖直方向上以一定的速度上升或下降。实验过程中,首先将金属框架固定并完全浸入放置在样品台上的液体中,然后通过计算机控制样品台以匀速下降的方式使得金属框架逐渐离开液体表面。在表面张力的作用下,金属框架离开液面时形成稳定的平面自由液膜。实验中所使用的液体样品为去离子水,室温下测量的表面张力系数为72.86mN/m。除特别解释外,后文中提到的液膜均指使用去离子水进行拉伸形成的液体薄膜。

图1 液膜拉伸装置示意图
1.2 横向剪切干涉系统
横向剪切干涉是一种非接触式测量技术,通过比较两束光束间的相位差异来检测光学系统中存在的波面畸变。当经畸变区域的光束与空气中正常传播的光束相遇时,其相位分布会因介质折射率的不同而产生差异。光束继续传播过程中经过平行平晶的前后两个表面反射形成可见的条纹图案,并在宏观上反映表现为系统干涉条纹级数的变化。由于液膜与空气折射率间的差异(nair=1,nwater≈1.33),激光波面穿过空气中的平面液膜时,即使是微米级别的薄膜也使得在传播过程中引起明显的光程差,进而导致相位差的较大畸变[28]。因此,只需计算液膜存在前后的相位差变化即可得到被测液膜的厚度信息。实验台架如图2 所示,主要装置包括小孔光栅、光学衰减片、扩束准直透镜组和平行平晶。实验采用波长632.8nm的He-Ne激光源,相干长度约30cm,额定输出功率21mW。系统中,首先使用衰减片降低激光光束强度,通过小孔光栅过滤其散射光后再经扩束准直透镜组准直,随后光束继续穿过被测液膜引发相位畸变,经平行平晶反射后形成干涉条纹,最后由装备镜头(NIKKOR AF50MM F1.8D)和单色滤光片(中心波长632nm,半带宽10nm)的CCD 相机(Daheng MER-132-43GC-P)记录到计算机客户端。使用干涉系统对液膜厚度进行测量时,首先将液膜拉伸装置中形成的平面液膜放置于图2中的F处,随后相机以43帧/s @ 1292×964的参数连续拍摄,曝光时间设置为500μs,直至液膜因重力作用下排水而破裂。

图2 横向剪切干涉系统示意图
进行后续膜厚计算的前提是明确被测对象存在引起的光程差和相位差的变化。因此对液膜和光路进行模型分析,并定义η为光程差与薄膜厚度之比。由于重力作用,液膜厚度在竖直方向上一定存在厚度梯度,这意味着光路并不是垂直穿过液膜前后两个表面。然而,考虑到微米级的厚度值与液膜厘米级的二维长度、宽度尺寸相比很小,可以将液膜简化为竖直方向上厚度均匀的平行薄膜。在这种情况下,光路可以近似为垂直穿过液膜前后的两个表面,η的表达如式(1)所示。
式中,t为待测液膜厚度,μm;n为折射率。
在横向剪切干涉系统中,光路在传播过程中经平行平晶的前后两个表面反射,产生同一个平面内的两个反射波。由于光路与平行平晶之间入射夹角的存在,上述两个反射波会导致一定的横向位移剪切量s。因此,被测液膜不存在时,系统背景条纹的相位差分布可以表示为式(2)。
式中,λ为激光波长,nm;ΔZ为光路经平行平晶前后两个表面反射后的光程差。
对于给定的光学平行平晶,ΔZ是恒定的。由于被测液膜存在时导致了附加相位差,此时条纹的相位差分布为式(3)[29]。
光路与平行平晶之间入射夹角增加到一定值,横向位移剪切量s大于液膜区域,即超过液膜宽度Lf时,不同反射波中的液膜图像在同一平面内必然完全错开,原本剪切干涉系统输出的复杂干涉条纹会变为类似于双曝光干涉系统的简单干涉条纹,这意味着在s>Lf条件下φ(x,y)和φ(x-s,y)至少有一个值为0。结合式(2)、式(3),液膜存在前后导致的相位差变化可简化为式(4)[30]。
得到被测液膜存在前后造成的相位差变化后,可通过式(5)计算得到待测液膜厚度t。
由光学理论可知,式中N=φ/π 表示干涉条纹级数,下角标0、1 分别代表被测液膜存在前后的干涉条纹级数。其中,测量厚度的不确定度主要由数据处理过程的误差所产生,具体受到干涉图像中条纹定级过程的影响。干涉现象的基本特性决定了干涉条纹绝对级数N的误差不会超过±0.5级,将其代入式(5)得出液膜厚度测量的最大绝对误差为0.75λ。
2 结果与讨论
2.1 数据分析与膜厚计算
首先对三角形框架产生的拉伸液膜[图3(a)]厚度进行光学检测,液膜高1.3mm,底部最宽处为1.9mm。采用横向剪切干涉系统,相机连续拍摄获取的部分干涉图像如图3(b)~(f)所示。根据图像中的条纹数量、级数分布和清晰度等因素,初步选取第100帧图像进行后续分析计算。图3(e)为第100帧的干涉条纹图像,所示液膜在条纹加持下表面流场具有可视化的特点。由于液膜相位差的存在,此时三角形液膜表面的暗纹分布与图3(f)所示系统条纹分布明显不同。
为进一步获取第100帧图像中干涉条纹所蕴含的相位变化信息,采用Matlab编写的条纹追踪算法分别对系统背景条纹和液膜引起的畸变条纹进行跟踪捕捉。具体步骤如下:①首先选取其中一条干涉暗纹曲线,两端分别选取两个参考点作为追踪起点和终点;②通过给定的追踪方向和步长,从起点开始沿着暗纹曲线方向移动一个步长,并在新位置确定一个参考点;③确定新的参考点后,通过分析附近的干涉条纹,在曲线上继续选择相邻的参考点;④重复上述步骤,直到达到设定的终点或曲线上的参考点数量达到预定值。图4为基于条纹追踪算法采集到参考点的φx、φy数据集对图像中干涉暗纹分布的还原,其中三角形液膜轮廓用红色实线标记。根据横向剪切理论,将图3(e)中与竖直金属杆重合的中间暗纹预定为1 级。以1 级暗纹作为参考条纹,背景条纹中其余暗纹级数按±2 的变化趋势向两侧依次递增递减。级数分布顺序如图3(f)所示,图中红色直线与暗纹交点的上方数字为该条暗纹的对应级数N。根据预先假设的条纹级数顺序和条纹追踪得到φx、φy的重叠坐标范围,将φ(x,y)最高拟合为关于x,y的三阶多项式,拟合结果如图5所示。从图5 中可以看出,由φ(x,y)多项式计算得到的系统干涉暗纹级数分布与预先假设的条纹级数分布非常吻合,拟合效果较好,这表明人为预先给定的条纹级数顺序的分配是合理的,同时三阶多项式能够很好地反映出条纹中包含的φx、φy数据集信息。

图4 干涉条纹分布还原

图5 干涉暗纹拟合
基于拟合结果,得到φ(x,y)的系数矩阵如表1所示。其中y3项系数存在且不为0,这表明除发生横向剪切外,系统还存在y方向的微小竖直剪切量。分析原因可能是系统布置时相机和被测对象之间发生了水平方向的偏转,导致原始光束与剪切光束在y方向上出现了微小的偏移。
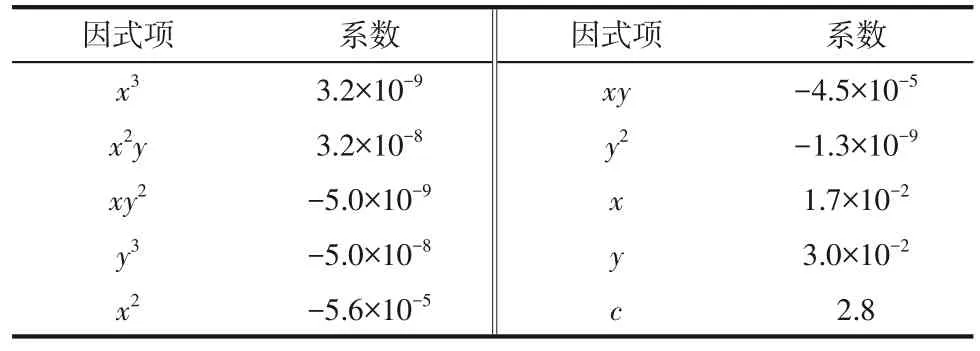
表1 系数矩阵计算
根据表1中的系数矩阵,将暗纹分布变化后的坐标参数φx、φy代入φ(x,y)表达式后求得对应系统条纹下液膜存在时的干涉暗纹相位分布与级数变化,如图6(a)所示;代入式(5)后,三角形框架内液膜厚度分布计算结果如图6(b)所示。

图6 条纹级数与三角形液膜厚度分布
图中N=3、5、7、9、11、13 标记的系列曲线分别表示三角形液膜内部不同级数的干涉暗纹轨迹上所反映的液膜厚度。整个液膜的最小厚度为0.98μm、最大厚度为9.37μm。在液膜底部附近区域,受表面流体扰动影响,形成从底部边界逐渐向内扩散的蘑菇云状逆流。不同曲线轨迹的末端受流动影响其膜厚存在较大差异,全场的下限重合表明顶部液膜厚度分布较为均匀;液膜厚度在竖直方向自上而下呈递增分布,同一水平方向厚度无明显变化,液膜薄弱区域集中在固-液附着面下方。
2.2 矩形液膜厚度全场分布测量
横向剪切干涉系统被用于测量膜厚时,条纹分布的密度对于准确计算液膜全场厚度起着重要作用。密集的干涉条纹分布能够涵盖更多的液膜区域,从而增加被测膜厚影响区域内的条纹数量。然而,较多的条纹数量会增加后续数据处理的计算量,由于矩形液膜区域大于三角形液膜区域,原先的条纹数量不足以覆盖整个液膜区域。因此,为进一步测量矩形区域内液膜厚度的全场分布,首先需要对系统中球透镜B 与凸透镜C 间的距离进行调整,使得干涉图像中的条纹分布密度增加。
对干涉系统进行调整后,将三角形液膜从光路中撤出并替换为拉伸形成的矩形平面液膜(高20mm、宽19mm),采用相机连续获取液膜干涉图像直至其破碎。按照同样的处理方法,第57 帧图像计算得到的液膜厚度结果如图7所示。可以看出矩形液膜厚度的空间分布与三角形液膜基本一致,在竖直方向上膜厚接近于线性分布,并且顶部膜厚最小且接近于0。在提高测量精度后(增加条纹数量),图中不同级数的干涉暗纹轨迹上所反映的液膜厚度相差较小,表明厚度分布在水平方向具有更好的均匀性。整个液膜厚度处于0.1~13μm范围内,膜厚的线性拟合结果表达式为t(y) = 0.03y-18.58。同时从干涉图像中可以观察到,随着液膜区域面积的增加,液膜主体因重力作用而向下流动,而框架两侧则具有明显的复杂逆行流动。Mysels 等[31]通过观察金属丝框架表面附着的液膜流动过程,将这种液膜表面的现象称为边缘再生现象。具体表现在液膜的主体区域,流场流动受重力主导,膜厚均匀,时间频率较低,因此呈现出低频均匀分布的条纹特征。而在靠近金属框架区域附近,受黏性力的影响,液体流动导致局部非均匀膜厚,膜厚梯度增加,从而呈现出高频周期变化的条纹特征。此外,液膜区域中心的干涉暗纹曲线发生突变,表明中心高度坐标附近存在膜厚突变,这与计算得出的液膜厚度结果(在700~800像素区域内)是一致的。

图7 矩形液膜厚度分布与干涉图像
2.3 不同时刻液膜厚度分布
为研究液膜形成至破裂过程中厚度随时间的变化关系,首先选择了第一节中涉及三角形液膜的三个不同时刻的干涉图像进行处理,分别是τ1=2.3s(100 帧)、τ2=3.7s(157 帧)和τ3=5.0s(214 帧)。其中,τ3对应的第214帧干涉图像为三角形液膜破裂的前一帧图像。
从图8中可见,随着时间的推移,液膜区域中的干涉暗纹逐渐下移,且与竖直方向的夹角逐渐变小。这种暗纹分布的变化与液膜厚度的变化相对应。构成液膜的液体受重力影响不断向下流动到容器中,导致液体体积减小,因此液膜整体厚度逐渐缩小,进而减小了液膜引起的相位差。整个过程中液膜全场的最大厚度从τ1=2.3s 时的9.37μm 减小到4.31μm。在液膜破裂之前的瞬间,顶部膜厚达到其最小值。进一步探究液膜从形成到破碎过程的整个变化,选取不同时刻的矩形液膜干涉图像进行处理。同时,在液膜的竖直中心线上选取了A1~E1五个位置点,这些位置点从液膜顶部到底端等间距排列,不同位置点液膜厚度随时间的变化趋势如图9所示,其中液膜在第1 帧图像(τ=0)开始形成并在第361帧(τ=8.4s)时破裂。

图8 不同时刻三角形液膜厚度分布

图9 矩形液膜不同位置点厚度随时间的变化
从图9中可以观察到,当金属框架顶部逐渐提升至超出液面一定距离时,下方的拉伸液膜完全形成且全场膜厚最大。在整个形成到破裂的过程中,液膜的最大厚度从14.99μm 减小到9.04μm,而液膜的最薄处厚度从0.24μm 减小到0。液膜厚度变化速率在0~1.4s时间段内最大,这与开始时刻构成液膜的液体体积最大有关。随后构成液膜的大量液体在重力作用下迅速向下排液,导致不同位置处的液膜厚度逐步减小,液膜快速变薄。经过5.8s 后,剩余液体的体积勉强可以保持液膜整体形状,此时膜厚减小的速度较初始时刻逐渐降低。液膜最薄区域始终位于靠近金属横杆的液膜顶部,当受到微小扰动后极易出现不稳定特征。到第8.4s时,顶部液膜率先减小到临界值0.08μm 并发生破裂。尽管此时液膜的最大厚度仍为9.04μm,但顶部液膜的破裂打破了系统整体平衡,随之导致了液膜整体破裂并消失。图10 展示了实验中液膜破裂的连续两帧图像,可以清晰地看到自顶部率先破裂后,液膜从上到下逐渐消失。

图10 液膜破裂前连续两帧图像
得到液膜的全场厚度分布后,可通过式(6)进一步计算出液膜排液过程中的体积变化。式中,hy为液膜任一位置到液膜顶部距离与液膜总高度H的比值,t为对应的液膜厚度。
图11 为排液过程中的液膜体积分布变化,可以看出随着重力排液的持续进行,不同位置处上方液膜的体积V均逐步减小。由于hy=1对应着高度为H的整个液膜,因此整个排液过程中液膜最大体积为2.66mm3。根据式(7)计算,排液过程中液膜最大体积流量qv为0.28mm3/s。

图11 排液过程中液膜体积分布变化
3 结论
本文使用液膜拉伸实验装置形成了空气中具有自由界面的稳定液体薄膜,并借助横向剪切干涉系统对拉伸液膜的全场厚度分布进行了测量研究。
(1)对三角形框架形成的液膜进行厚度检测,采用条纹追踪算法后还原了干涉条纹的分布,计算得到的三角形液膜厚度范围为0.98~9.37μm。受重力排液影响,液膜在竖直方向存在厚度梯度分布。液膜顶部厚度分布均匀,最小为0.98μm。由于流动的影响,液膜底部厚度存在差异,膜厚最大为9.37μm。
(2)提高系统测试精度后,相比三角形液膜,矩形液膜在水平方向具有更好的均匀性,整个液膜厚度范围为0.1~13μm。液膜全场的厚度近似呈线性分布,顶部最薄弱处厚度仅为0.1μm。在干涉条纹作用下,液膜变得可视化。液膜主体部分因重力作用向下流动,而框架两侧则明显观察到复杂的逆行流动。液膜表面的流场可以通过干涉条纹的变化反映,并在主流区域和壁面附近呈现出两种不同的条纹分布特征。
(3)随着重力排液的进行,液膜全场厚度逐步减小,在开始时刻膜厚减小速率最大。τ>5.8s排液后期,膜厚减小速率变慢,顶部最薄弱处液膜厚度逐渐趋于0。液膜顶部初始厚度为0.24μm,当顶部膜厚减小到0.08μm 即初始膜厚的0.33 倍时,矩形液膜平衡体系被破坏,从顶部率先破裂后向下逐渐破裂消失。整个排液过程中液膜最大体积为2.66mm3,最大体积流量为0.28mm3/s。
猜你喜欢
水产养殖(2024年3期)2024-03-26
农产品质量与安全(2023年1期)2023-02-18
舰船科学技术(2022年21期)2022-12-12
沈阳航空航天大学学报(2022年5期)2022-02-03
中山大学学报(自然科学版)(中英文)(2021年3期)2021-05-26
睿士(2020年12期)2020-01-03
西南石油大学学报(自然科学版)(2018年5期)2018-11-06
民用飞机设计与研究(2016年3期)2016-12-12
发明与创新(2016年30期)2016-08-22
化工管理(2015年5期)2015-12-22