
自持续HIRS 辅助的MU-MISO 系统公平性研究*
2024-03-20 01:16赵丽娟
通信技术 2024年2期
赵丽娟,张 毅
(重庆邮电大学 通信与信息工程学院,重庆 400065)
0 引言
为了满足未来信息社会的通信需求,需要研究下一代移动通信系统6G 技术,以此跟进时代的步伐[1]。智能反射面(Intelligent Reflecting Surface,IRS)作为一种新兴技术,因其可重构无线传播环境的特性,在6G 通信领域具有不可或缺的地位[2]。IRS 中的每个反射元件都能够以期望的方式反射电磁信号,从而人为地创造有利的传播条件,进而提高无线通信系统的信道增益。根据反射元件能否放大入射信号,IRS 可分为被动IRS 和主动IRS。
被动IRS 仅反射入射信号,大多数研究假设被动IRS 的功耗可以被忽略[3-4]。然而,文献[5]指出,被动IRS 的功耗与反射元件的数量有关。在被动IRS 辅助的无线通信系统中,IRS 可以通过外接电源或电池供电,以此来维持其正常运行。但是,外接电源供电会降低部署的灵活性并增加实施成本,使用电池供电也会因容量问题限制IRS的运行寿命。为了进一步提高资源分配的灵活性,自持续IRS 辅助无线通信系统的研究引起了部分学者的兴趣[6-9],而IRS 自持续的实现需要从射频信号中收集能量。文献[6-7]将IRS 的运行时间分为两个时隙:第1个时隙用于能量收集;第2 个时隙进行信息传输,最后通过联合优化基站(Base Station,BS)和IRS处的波束成形及两个时隙的时间调度,来最大化系统的吞吐量。文献[8-9]提出了功率分割方案维持IRS 的自持续,主要是为每个被动元件配备一个功率分割器,BS 发射信号中的一部分被反射到用户,另一部分直接通过IRS 自身进行能量收集。因此,与被动IRS 辅助的无线通信系统相比,被动IRS 自持续的实现是以牺牲系统的性能增益为代价的,并且未考虑多用户(Multi-User,MU)通信的公平性问题。
主动IRS 继承了被动IRS 的特性和硬件结构,将其中的正电阻元件替换为负电阻元件,使得主动IRS 可以同时反射和放大入射信号,进而有效地抑制双路径损耗。文献[10]中主动IRS 在有源负载的支持下,通过同时调整反射相位和幅度来放大入射信号,其研究结果表明,与被动IRS 相比,部署主动IRS 可以大幅提高系统性能。文献[11]研究了主动IRS 的自持续问题,提出了多功能IRS 的概念,即IRS 可以同时收集能量、反射和放大入射信号,来最大化用户的和速率,弥补了被动IRS 自持续辅助系统所损失的部分性能;但仍未考虑MU 通信的公平性,且主动IRS 需要更高的功耗,自持续的实现难度也会增大。
综合考虑被动IRS 和主动IRS 的优劣,学术界研究了混合智能反射面[12-14](Hybrid IRS,HIRS),发现包含少量主动元件的HIRS 功耗较低,并且会在一定程度上抑制双路径衰减,能量效率[12]、频谱效率[13]、公平性[14]等方面均可得到显著提升。文献[12]提出了一种HIRS 架构,对一个4×2 的多输入多输出系统进行仿真。结果表明,与被动IRS 辅助的系统相比,仅含有单个主动元件的HIRS 辅助系统的能量效率提高了25%。
基于上述分析,自持续IRS 的研究集中于单纯的被动IRS 和主动IRS,并且未涉及HIRS。然而,被动IRS 自持续的研究是以牺牲系统的性能增益为代价实现的,主动IRS 的自持续模型实施难度大,且两者均未考虑MU 通信的公平性来确保每个用户的通信需求。鉴于此,本文提出了基于自持续HIRS 辅助的MU 多输入单输出(Multiple Input Single Output,MISO)下行链路通信系统的公平性传输方案。
1 系统模型与问题描述
1.1 系统模型
如图1 所示,本文考虑自持续HIRS 辅助MUMISO 下行链路通信系统,该系统模型由一个配备N根天线的BS、K个单天线用户和一个由M个反射元件组成的HIRS 构成,具体元件数量分配为M=Ma+Mp,其中Mp为被动元件个数,Ma为主动元件个数,主动元件部分记为A⊂{1,2,…,Ma}。当BS发射的线性预编码到达HIRS 时,被动元件进行能量收集以维持HIRS 的运行,主动元件通过低功率反射放大器对入射信号进行反射和放大的操作。HIRS 的系数矩阵为Θ=diag(v1,…,vM) ∈CM×M,,m∀ ∈M,其中θm∈[0,2π]和|αm|分别表示HIRS 中第m个反射元件的相移和振幅。如果m∉Λ,则此元件是被动的,振幅为|αm|∈[0,1];如果m∈Λ,那么|αm|∈[0,amax],amax是有源负载带来的最大功率增益,其增益可达30 dB[11]。为了便于论述分析,本文定义了一个加法分解Θ=Ψ+Φ,其中Ψ=⊙Θ表示主动元件的系数矩阵,Φ=⊙Θ表示被动元件的系数矩阵,是M×M维的对角矩阵,非零元素的位置由Λ决定且值为1,⊙是哈达玛积。

图1 系统模型
BS 发射的线性预编码信号可表示为:
式中:sk表示BS 发送给用户k的信息,满足;wk∈CN×1表示BS 发送给用户k的波束成形矢量。BS 到HIRS 的基带信道为G∈CM×N,BS 与HIRS 到第k个用户的信道分别是hd,k∈CN×1和hr,k∈CM×1。假设所有信道的信道状态信息(Channel State Information,CSI)都可以由BS 完美获得,即各链路的CSI 是理想的,用户k接收到的信号为:
HIRS 的能量收集方案设计中,被动元件将入射信号中的射频能量转换为直流功率,HIRS 收集的总功率可表示为:
由于线性能量收集模型不适用于实际电路,本文采用文献[16]中的非线性模型,故HIRS 的收集功率可表示为:
1.2 问题描述
本文的目标是在确保HIRS 自持续实现的前提下,通过联合优化BS 的发射波束成形和HIRS 的系数矩阵,最大化单个用户的最小速率,以此保证用户之间的公平性。具体的优化问题定义如下:
式中:Pmax是BS 的最大发射功率,C1 是对发射功率上界的约束,C2 是HIRS 维持自持续的功率约束条件,C3 和C4 是HIRS 系数矩阵中的振幅和相移约束。根据以上约束条件可知,P1 是一个多变量耦合且非凸的优化问题。
2 算法设计
本节采用交替优化(Alternating Optimization,AO)算法,将P1 分解为2 个子问题。利用逐次凸近 似(Successive Convex Approximations,SCA)和半正定松弛(Semi-Definite Relaxation,SDR)技术求解子问题。将P1 转换成更易处理的形式,则有:
2.1 BS 的发射波束设计
在固定HIRS 系数矩阵的条件下,优化BS 的发射波束成形wk。令,则子问题1 可写成:
约束条件C5 可以进一步细化为:
P3 中的约束条件C1 和C6 可以直接通过CVX工具解决,其余条件均为非凸,故P3 是一个难以直接求解的非凸问题。为了凸化式(11),本文引入了松弛变量{pk,qk},可将其松弛为:
由于f(qk)=-log(1+qk)是凸函数,通过应用一阶泰勒展开式(First-Order Taylor Expansion,FTS)找到函数在任意可行点处的下界,这促使本文采用SCA 算法来解决约束条件C9。在第l次迭代时找到局部解,f(qk)的下界为:
因此,约束条件C9 可等价为:
此外,针对P3 中的功率约束条件C2,可以将主动元件消耗的功率PIRS和被动元件收集的总功率PPR改写为:
式中:Tm=diag(tm)∈CM×M,tm是第m个位置为1,其余位置为0 的M×1 维的列向量,即tm=[0,…,1,…,0]T。因此,通过引入辅助变量X和βPR,可将约束条件C2 改写为:
约束C15 左边的凸性使得约束条件为非凸,采用FTS 可近似得到第l次迭代时的可行解{X},故X-1的下界可表示为:
一般来说,秩1 约束的求解是一个非凸问题,本文通过SDR 松弛C7 中秩为1 的约束条件,那么P3 便可以重写为一个标准凸优化问题。
式中:Γ={pk,qk,βPR,X}是辅助变量集。
因此,P4 可以直接使用CVX 工具箱[17]求解,如果秩为1,则可以通过特征值分解法获得的解,否则利用高斯随机化[18]获得P4 的近似解。
2.2 HIRS 系数矩阵设计
在获得BS 发射波束成形近似解wk*的情况下,可以通过子问题P5 优化Ψ,即:
通过FTS 展开约束C19,故其可转换为:
因此,P5 可等价为:
针对约束条件C2,同2.1 节,可将其转换为:
综上所述,P6 中的秩1 约束C26 导致其非凸,采用SDR 算法松弛秩1 约束,再通过高斯随机化求得近似解v*,对于秩为1 的解,则可以通过特征值求解。因此,最终的优化子问题可整理为:
2.3 整体算法和复杂度分析
本文所提出的目标问题是基于AO 算法求解的,算法1 总结了整体求解步骤。

对算法1 的复杂度进行分析,求解P1 问题的复杂度主要集中于第4 和第5 步。根据文献[19],步骤4 和步骤5 的复杂度分别为
其中ε为收敛精度,D1和D2分别为求解P4 和P5中高斯随机化的次数。因此,算法1 的计算复杂度为,其中L为迭代次数。
3 仿真结果及分析
本节提供了数值结果来评估自持续HIRS 辅助MU-MISO 系统的性能。假设系统由1 个多天线的BS、1 个HIRS 和4 个单天线用户组成,其中HIRS是含有M个元件的均匀平面阵列。本文考虑仿真系统由二维平面构成,BS 和HIRS 的坐标分别为(0 m,0 m)和(50 m,10 m),4 个用户随机分布在以(100 m,0 m)为圆心、半径为5 m 的圆内。系统工作的载波频率为750 MHz,波长为λc=0.4 m[20],大尺度衰落信道建模为L(d)=C0(d/D0)α,其中为参考距离D0=1 m 时的路径损耗,d为链路距离,α为路径损耗指数,BS-HIRS、HIRS-用户和BS-用户链路的路损指数依次为αBI=2.2,αIU=2.2 和αBU=3.6。直接链路的信道模型服从瑞利分布,级联链路和G的信道模型服从莱斯因子为5 dB 的莱斯分布,具体模型为:
除非另有规定,系统参数设置如表1 所示。

表1 仿真参数
本文所提方案是可以同时进行能量收集、信号反射和放大的HIRS 辅助的MU-MISO 通信系统。为了验证其有效性,设计了3 种基准方案。
(1)DF-IRS(Dual-Functional-IRS)辅助的通信系统。DF-IRS 是指可以同时支持能量收集和信号反射的IRS。
(2)SF-IRS(Single-Functional-IRS)辅助的通信系统。SF-IRS 是指仅反射信号的IRS。
(3)无IRS 辅助的通信系统。
图2 给出了本文方案与基准方案的最小用户速率收敛性能表现,用户速率随着迭代次数的增加而增大,并在迭代次数为15 时收敛。此外,所有基准方案的最小用户速率低于本文所提方案,说明了所提方案的有效性。

图2 迭代次数与最小用户速率的关系
图3 给出了IRS 中反射元件占比与最小用户速率之间的关系,随着信号反射元件占比的增多,DF-IRS 和本文方案的最小用户速率增加,这是因为存在更多反射元件的IRS 可以在波束成形中提供更高的灵活性,进而产生更强的级联信道。当HIRS 中的主动元件占比为0.4 时,本文方案在最小速率方面已经超过SF-IRS 基准方案。相比之下,DF-IRS的自持续成本仍然居高不下,说明了本文方案在提高用户速率和实现自持续之间的有效权衡。

图3 IRS 中信号反射元件占比与最小用户速率的关系
图4 给出了在IRS 中信号反射元件占比为0.4的条件下,BS 发射功率与最小用户速率之间的关系曲线,可以看出本文所提方案优于基准方案,但是与SF-IRS 方案之间的差距较小,主要原因是SFIRS 理想化地忽略自身的能量消耗。而本文充分考虑到能耗问题,提出了HIRS 的自持续方案,以保证HIRS 在没有外供电的情况下正常运行。随着BS发射功率的增大,两者之间的差距也增大。相较于无IRS 辅助的方案,有IRS 可以为系统提供额外的级联链路,所提方案与无IRS 辅助方案之间的性能差距逐渐变大。

图4 BS 发射功率与最小用户速率的关系
图5 给出了BS 天线数量与最小用户速率之间的关系,两者是正相关的。这是因为BS 的天线数量越多,可以获得的波束成形增益越大,从而增大信号的传输速率。对比不同尺寸大小的HIRS 可以看出,随着元件数量M的增多,本文所提方案的最小用户速率也随之增大。原因在于,HIRS 可以增强级联链路的信道增益。
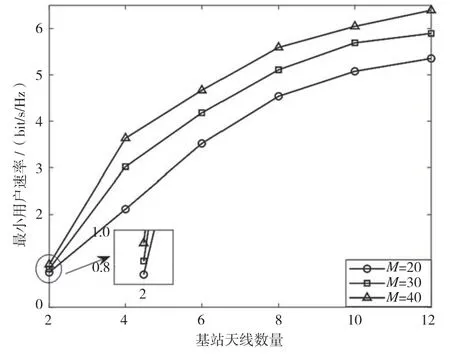
图5 BS 天线数量与最小用户速率的关系
4 结语
本文提出了自持续HIRS 辅助的MU-MISO 下行链路通信系统,集信号反射、信号放大和能量收集于一体的HIRS 可以在维持自持续的前提下,最大化最小用户速率,实现MU 通信的公平性。通过考虑BS 发射波束成形和HIRS 系数矩阵的耦合,建立了最大化最小用户速率的非凸优化问题。为此,设计了高效的AO 算法,将原始目标问题分解为2个单变量的子问题,利用SCA和SDR技术进行求解。仿真结果表明,本文所提方案优于基准方案,且与SF-IRS 方案相比,选择适当数量的主动元件便于有效地平衡用户速率提高和IRS 自持续实现之间的关系。
猜你喜欢
纺织科学研究(2023年9期)2023-10-23
电机与控制应用(2022年4期)2022-06-27
移动通信(2021年5期)2021-10-25
天津外国语大学学报(2021年1期)2021-03-29
疯狂英语·新策略(2019年9期)2019-10-17
趣味(语文)(2019年5期)2019-09-02
Frontiers of Nursing(2018年1期)2018-05-21
中国交通信息化(2014年3期)2014-06-05
自动化与仪表(2014年10期)2014-02-26
