
基于深度学习与信息交互的5G 终端群组定位方法*
2024-03-20 01:16谢腾飞秦智军
通信技术 2024年2期
谢腾飞,解 晨,秦智军,何 迪
(1.江西省检验检测认证总院特种设备检验检测研究院,江西 南昌 330052;2.北斗导航与位置服务上海市重点实验室,上海交通大学 电信学院感知科学与工程学院,上海 200240)
0 引言
室内定位通常是指在室内环境中实现的位置定位,主要是利用基站定位、无线通信、惯性导航等技术集成形成的一套室内位置定位体系[1-2]。
在无线通信时代,已经有很多针对室内定位的技术和方法,目前较为成熟的定位技术有Wi-Fi、蓝牙[3]、ZigBee[4]、超声波[5]、射频识别[6]等。定位方法有基于接收信号强度指示(Received Signal Strength Indication,RSSI)的三角与三角质心定位方法[7]、基于信号到达时间(Time of Arrival,TOA)和信号到达时间差(Time Difference of Arrival,TDOA)的定位方法[8]、基于Wi-Fi 信号RSSI 的指纹定位方法[9]。它们都有各自的特点和优势区间,三角质心定位和TOA、TODA 定位的精度不算太高,比较依赖于RSSI 等信息的测量精度;而指纹定位在保证定位精度的时候需要提前进行数据采集,因此在实际应用中针对不同的场景每次都需要重新进行模型训练。
随着第五代移动通信技术(5th-Generation Mobile Communication Technology,5G)的诞生和发展,增强型移动宽带(Enhance Moblie BroadBoand,eMBB)、高可靠低时延通信(Ultra Reliable Low Latency Communication,URLLC)、大规模机器通信(massive Machine Type Communication,mMTC)等对人们的生活产生了巨大的影响,且对提升室内定位的精度提供了有益的帮助。
传统的三角定位法通常使用最小二乘解,这个近似解与真实解的误差可以通过增加一层约束来减小;而对指纹定位来说,定位精度受到许多因素的影响,在样本数较多的情况下定位精度能够稳定在一个较高的水平,但是高精度指纹定位所需模型训练的成本过高,而低精度模型训练成本虽低,但是定位精度过差。
本文研究的主要内容是结合5G 终端间的交互信号改进现有的室内定位方法,并结合深度学习方法提高5G 终端群组的最终定位精度。主体思路为:将5G 交互信号转化为5G 终端间的距离,以此作为约束提高基于RSSI 的三角定位的精度。因此,本文提出在5G 场景下,将获取的多个终端群组间的相互测距信息作为多目标定位的有益信息,并结合深度神经网络(Deep Neural Network,DNN)模型,提升低精度模型的精度,以降低指纹定位模型的训练成本,有效提升群组定位的精度。基于DNN指纹定位预测模型,提出低精度DNN 定位优化方法以降低DNN 模型训练成本。仿真试验结果表明,基于增加终端间距离信息所提出的这些改进定位方法相较于多种传统定位方法,对于5G 终端群组的最终定位精度都有一定的提升。
1 传统定位方法及其缺陷
1.1 传统基于RSSI 测距的定位方法及其缺陷
传统定位方法中较为常用的是依赖参数测量的定位方法,通常是指通过接收信号所携带的信息,判断终端与基站的相对位置;再依据基站的位置得出终端可能存在的位置域;最终通过判断终端位于各个位置的可能性,确定终端最可能存在的位置。在这类方法中最常用的是基于RSSI 的测距与定位方法。
因为无线信号多为毫瓦(milliwatts,mW)级别,所以对RSSI 进行归一化,将其转化为分贝毫瓦(Decibel-milliwatts,dBm),表示某一功率与1 mW 的相对数值,分贝毫瓦功率(dBm)与毫瓦功率(mW)的具体计算过程如下:
式中:x为接收信号的归一化RSSI 值,dBm;P为接收信号的实际功率值,mW。
对于理论模型,常采用无线信号传播的路径损耗模型,常用的传播路径损耗模型有自由空间传播模型、对数衰减路径损耗模型、Hata 模型、对数常态分布模型等。以自由空间损耗模型为例,模型损耗的计算过程如下:
式中:Loss为路径损耗,dB,即接收端功率到发送端功率的衰减;d为终端距信源的距离,km;f为频率,MHz;k为路径衰减因子。当然,所有的模型与现实环境都有一定的差距。依此即可根据RSSI计算或估计终端距信源的距离。
1.2 无线指纹定位方法
指纹算法最初是一种对比识别所采集的指纹信息的软件编程算法,常用于考勤机、指纹锁、手机指纹解锁、指纹支付等。但随着科技的不断发展和现实的需要,指纹算法被应用到了各个领域,如文本识别、图像识别、室内定位等,单一的生理指纹特征已被扩展成为具有唯一性的信号特征,并且都取得了较好的效果。
基于无线信号强度的位置指纹定位方法的原理是:首先,离线阶段在定位区域内选取一些离散点,在每个离散点及其周围采集RSSI 信号特征向量并取平均作为该点的指纹信息,再将指纹信息与实际物理位置一一对应后存入离线指纹库;然后,在线阶段需要进行定位时,基于匹配算法找到数据库中与输入的待定位点的RSSI 特征向量最相似的点作为估计位置。无线指纹定位流程如图1 所示。
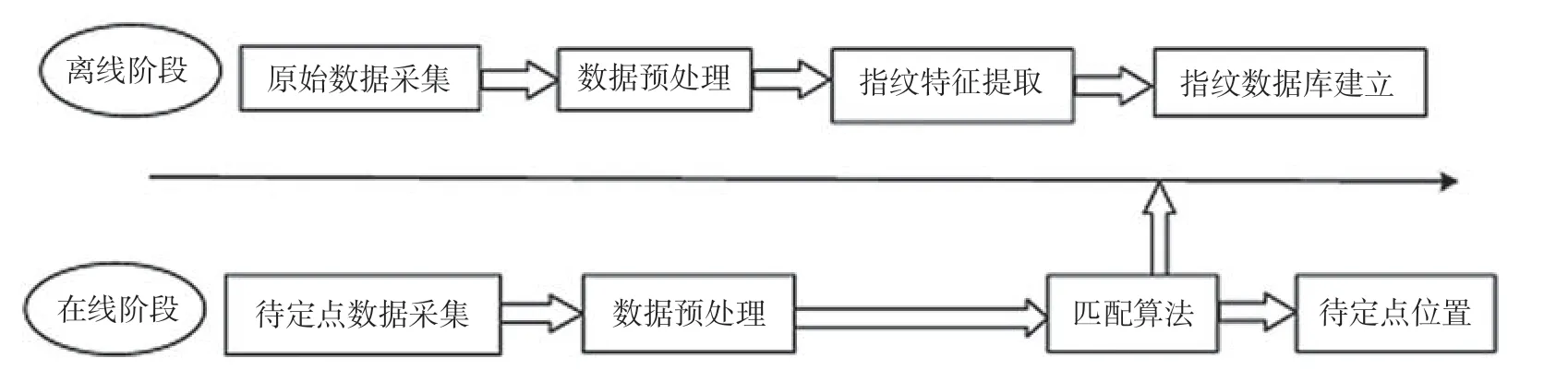
图1 无线指纹定位流程
通过匹配算法确定待定位点的位置是无线指纹定位方法最关键的一步,即通过实时接收的信号强度与离线数据库进行匹配,找出相似度最高的若干个数据。目前,典型的匹配算法主要有最近邻法、核函数法、最大似然概率法、神经网络法、朴素贝叶斯法、支持向量回归法等。最近邻算法(K-Nearest Neighbors,KNN)作为最基本的匹配算法,最先应用在微软的RADAR 系统中,但是其存在定位精度不高且系统稳定性差等缺点。在此基础上提出加权K 最近邻(Weighted K-Nearest Neighbors,WKNN)算法。相比KNN 算法,WKNN 算法通过赋予权重选择K 值,提高边缘位置点的定位精度,因而成为目前较常用的位置指纹匹配算法。
1.3 传统定位方法的缺陷
由于室内定位技术的发展尚未成熟,现有的定位算法存在一定的缺陷,基于RSSI 测距的三角定位算法主要受限于RSSI 测距的精度,由于实际场景过于复杂,RSSI 测距的精度受到背景环境的影响,无法达到很高的精确度,因此,依赖RSSI 测距的三角定位算法也无法达到很高精度;而基于到达时间和到达时间差的定位算法需要专业设备的测量,普通的移动终端较难获取精确的到达时间或到达时间差,在实际应用中成本较高;基于到达角度的算法的主要问题和基于到达时间的算法类似,并不适用于普通场景。
指纹定位算法是对传统定位算法的一种改进,它解决了传统RSSI 测距定位算法过于依赖测距精度的问题,直接将RSSI 信号与具体位置一一对应,直接跳过了利用RSSI 计算基站—终端距离这一步骤,但是指纹定位算法有一个较大的问题是需要先使用离线数据库对模型进行训练,离线数据库对每一个不同的场景都需要获取针对该场景的指纹数据库,这就导致训练模型的成本过大。
因此,本文提出一种针对上述问题的优化和解决方法——5G 终端群组定位模型,通过增加5G 终端间的距离约束,以达到提高基于参数测量的定位算法的精度和降低基于指纹匹配算法的成本。但是在4G 场景下,群组定位很难找到合适的定位场景,而在5G 场景下,由于室内通常存在多个智能电子终端,因此本文提出结合5G mMTC 场景增加终端节点间的距离信息,利用5G 终端之间的距离信息补充传统测距方法的不足,将传统方法对基站与终端测距精度的依赖部分转移到对5G 终端与5G 终端测距精度上,利用5G 终端与5G 终端之间测距的较小误差调节最终的测距精度;对于精度较高但是训练成本同样较高的指纹定位算法,本文提出利用5G 终端间的测距误差降低训练成本,具体来说就是使用较少的数据库对网络进行训练,最后利用5G 终端间的测距信息对最终结果进行修正。
2 本文提出的5G 终端群组定位方法
由于传统的基于RSSI 测距信息的算法较为依赖测距精度,而测距精度受环境影响较大,因此使用深度学习算法直接将接收到的RSSI 信号作为输入特征,将位置信息作为输出特征,进行模型训练并预测,也可以将接收信号作为输入特征,将离线位置信息作为分类标签,进行分类,2 种方法均能降低定位精度对RSSI 测距精度的依赖。
2.1 改进的DNN 定位算法
DNN 定位算法依赖定位区域内的初始数据对神经网络进行训练,假设获取的离线数据格式为:
获取一定量的离线数据之后,训练网络参数,得到最终预测模型,网络输入为m×n维RSSI 向量(m为信号发送节点的个数,n为待测终端的个数),且RSSI向量中各个特征都是等价的,因此直接采用全连接层作为隐藏层的主体,所选用的深度神经网络结构如图2所示,网络内部的各层结构如图3所示。
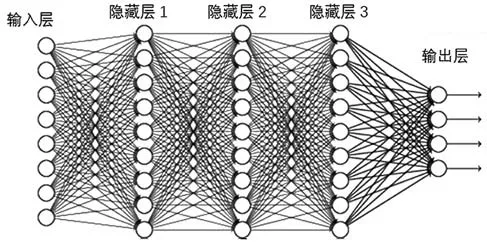
图2 深度神经网络结构
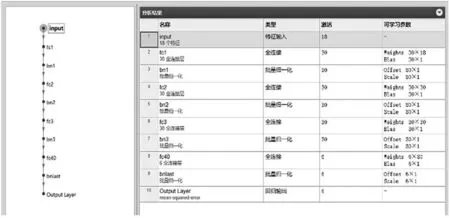
图3 DNN 定位算法神经网络各层结构
通过DNN 训练得到预测网络后,可以通过该网络得到基于5G 接入点(Access Point,AP)与终端间距离信息的预测结果,这个结果的精确度通常与训练样本数、RSSI 信号稳定程度相关,训练样本数越多、RSSI 信号越稳定,则神经网络的预测结果越精确。由于RSSI 信号的稳定程度受外界环境因素影响较大,因此本文主要针对训练样本数进行优化。
在使用少量样本进行训练时,待测终端的初始预测位置误差通常较大,因此在初始预测的基础上需要对待测终端进行进一步优化,并使得优化后的DNN 算法在样本数较少的情况下也能达到较高的定位精度。
2.2 基本算法流程结构
本文所提出的网络模型包括2 个部分:首先,利用DNN 模型结合基站与终端之间的RSSI 信息,对终端位置进行初步定位;其次,依据初步定位的结果,利用交互信息对初步定位结果进行修正,具体流程如图4 所示。
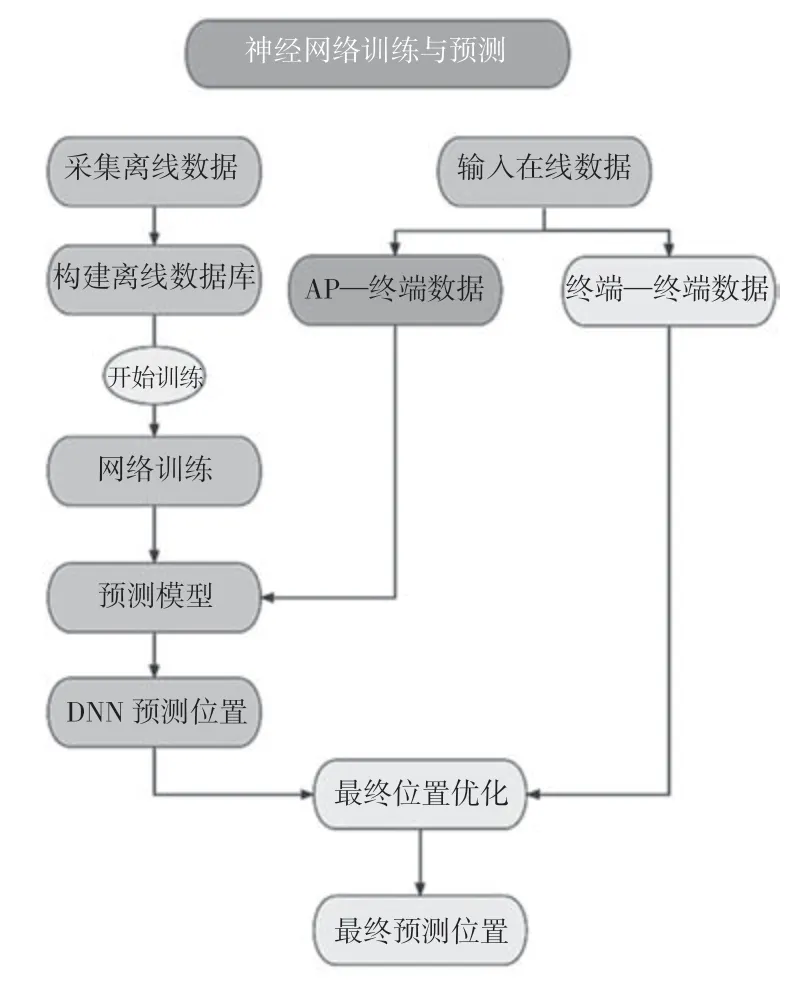
图4 基于深度学习与节点间信息交互的5G 终端群组定位算法流程
传统的DNN 室内定位算法与指纹匹配算法类似,可以归为指纹定位类,主要利用离线数据库对网络进行训练,然后利用训练好的网络对在线数据进行位置预测。在样本数充足的情况下DNN 定位算法可以达到较高的定位水平,但是如果在样本数量一般或较少的情况下定位精度较差。因此,本文对传统DNN 定位算法的优化主要使用终端与终端之间的距离信息对传统DNN 网络预测结果进行修正,以提高样本数较少的情况下网络的定位精度,从而达到降低训练成本的目的。
2.3 网络损失函数的设定
网络损失函数是深度学习中的关键因素,主要用来衡量模型预测的好坏,在一定程度上决定了模型的定位精度。对于单终端的定位网络,直接使用预测终端位置与实际位置的距离作为损失函数:
式中:(xi,yi)为第i个节点的实际位置,为第i个节点的预测位置。
由于需要对多个终端进行定位,因此考虑损失函数有2 种选取方式:
式中:n为待测终端的数目。具体而言,式(5)所示的损失函数可直接计算多个终端的平均误差,式(6)所示的损失函数则是将所有位置信息都视为输出并求均方根误差。虽然式(5)所示的损失函数更加接近所需的定位精度,但其实2 种损失函数都能够衡量预测结果的好坏,且式(6)所示的损失函数在神经网络中较为常用,比较有利于神经网络参数的调整和学习算法的选取。
2.4 网络学习算法
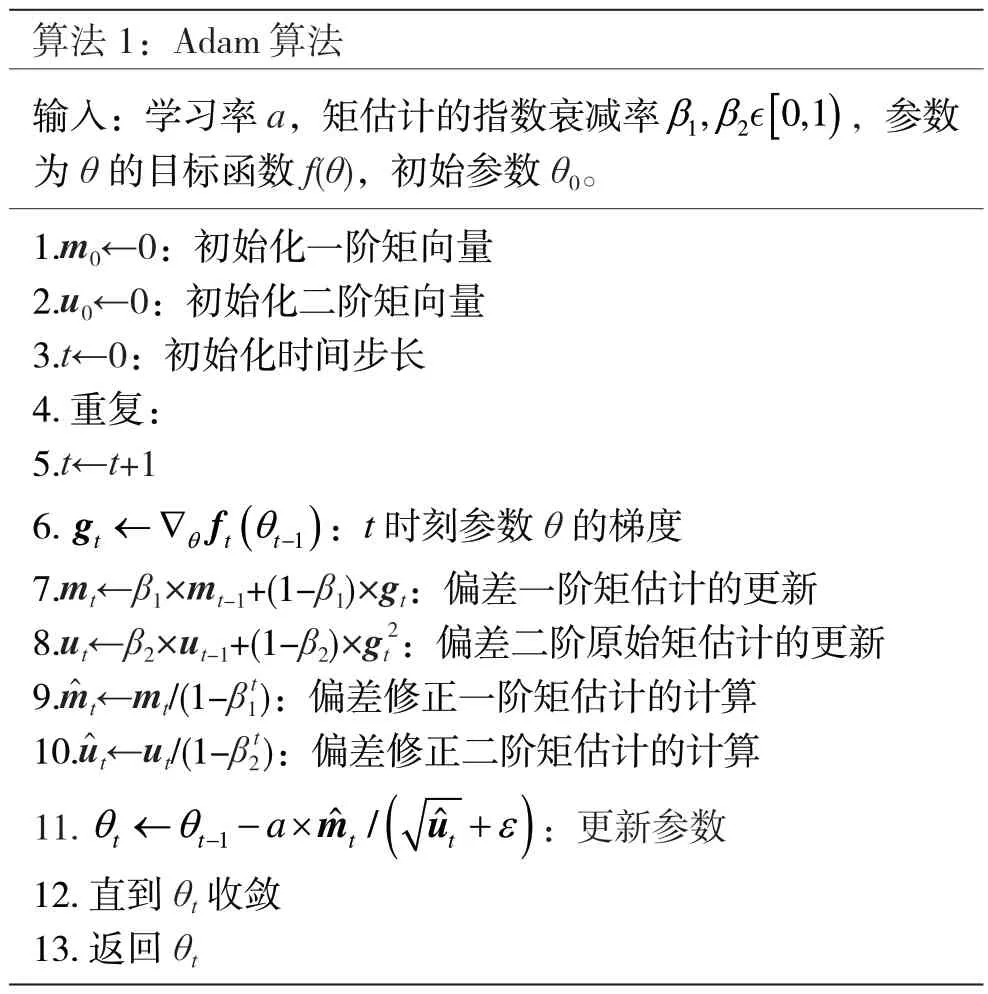
本文使用Adam(Adaptive Moment Estimation)学习算法对模型进行训练[10]。Adam 算法是基于自适应梯度算法(AdaGrad)和均方根传播(RMSProp)算法的改进算法,是一种可以替代传统随机梯度下降过程的一阶优化算法,它能基于训练数据迭代并更新神经网络权重。Adam 算法的主要步骤如算法1 所示,其中,乘法运算均按元素相乘。
3 仿真试验分析
本文设置的仿真场景考虑一个室内的封闭区域,该区域大小为100 m×100 m,而5G 终端所在的房间大小为20 m×20 m。在仿真区域内设置多个5G 小站,并在仿真的房间内放置4 个待测的5G 终端。5G 小站的位置固定且已知,5G 终端位置随机分布,利用信号在自由空间的传播模型,同时修改衰落参数以及阴影干扰方差,从而可以修正测距误差,最终使测距误差更加符合实际情况。具体场景如图5 所示。
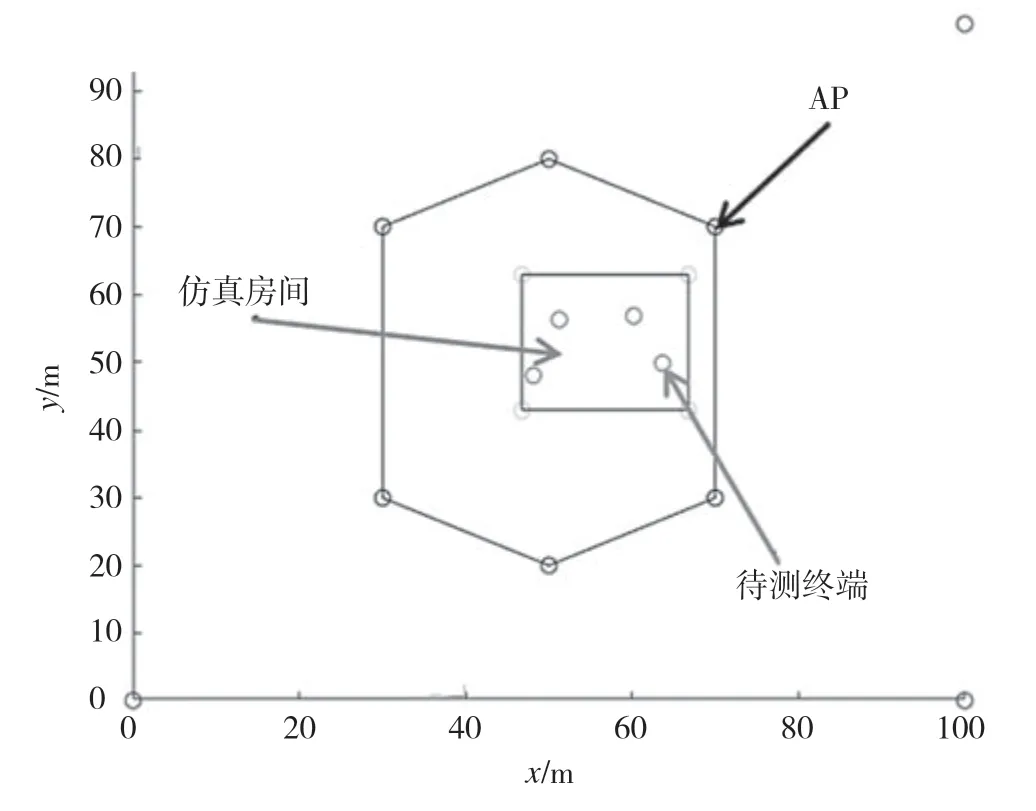
图5 具体仿真场景
图5 中六边形的6 个顶点代表5G 小站,具体位置为(30,30)、(30,70)、(50,80)、(50,20)、(70,30)、(70,70),六边形内部的矩形代表房间边界,矩形内部的小圆圈代表待测5G 终端分布,随机分布在仿真房间内。5G 终端与5G 小站之间的测距误差为3~4 m,5G 终端与5G 终端之间的测距误差为0.2~0.3 m。
5G 信号的衰落可根据自由空间无线信号传播公式来进行仿真,该公式为:
式中:k为路径衰减因子,根据场景调节,在仿真试验中取4;φ为一个高斯随机变量,主要通过调节φ的方差来控制RSSI 的测距误差。
在改进的DNN 训练过程中,Adam 算法的相关参数设置为α=0.1,β1=0.9,β2=0.999,ε=10-8。定位误差与训练样本数之间的关系曲线如图6 所示。由图6 可以看出,训练样本数较少时,由于网络训练得不充分,单一的传统DNN 训练模型并不能很好地预测位置终端的位置,但是对改进的DNN 定位算法来说,由于有5G 终端之间的距离信息修正最终结果,因此可以改善定位的精度。与此同时,改进DNN 算法可以保证在训练样本数目较少的情况下有更稳定和更优的定位精度。
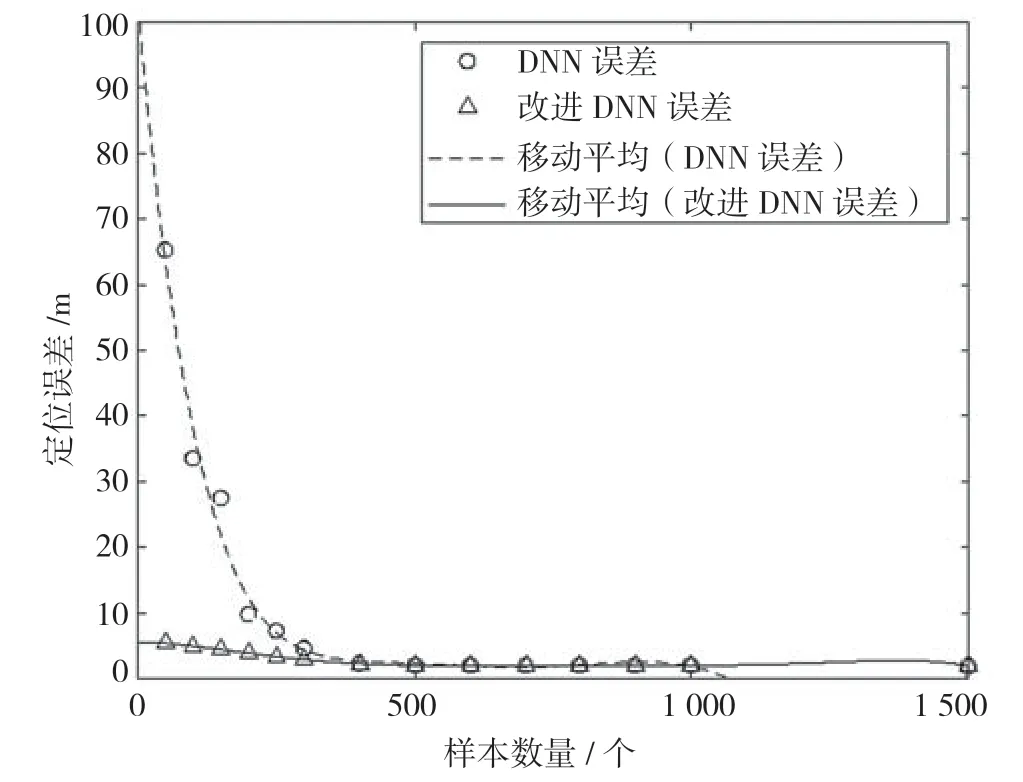
图6 定位误差与训练样本数之间的关系
4 结语
本文提出的5G 终端群组定位模型的重点在于终端间的距离信息对群组定位性能的提升,考虑到5G 时代mMTC 场景下的新型室内群组定位模型,并结合新型定位模型改进传统定位方法。仿真试验表明:基于增加终端间距离信息所提出的改进的DNN 定位方法相较于传统定位方法能够实现定位性能提升,因此,可将改进DNN 算法作为5G mMTC场景下室内群组定位的一个较好的解决方案。
猜你喜欢
军事文摘(2023年4期)2023-04-05
科学(2020年3期)2020-01-06
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
测控技术(2018年4期)2018-11-25
电子测试(2018年14期)2018-09-26
电子制作(2017年7期)2017-06-05
山西大同大学学报(自然科学版)(2016年6期)2016-01-30
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
太空探索(2014年1期)2014-07-10
