大数据驱动下的智能农机自主作业路径规划与优化研究
2024-03-22 09:05魏铮
南方农机 2024年6期
魏 铮
(山西应用科技学院,山西 太原 030062)
随着我国经济和社会的快速发展,农业生产的规模化、机械化、智能化已成为大势所趋。为适应这一发展需求,开发智能化和精准化的农业机械装备尤为关键[1]。近年来,整合大数据分析和人工智能技术,研发能够自主规划和优化作业路径的智能农机,已成为农业机械化发展的重要方向。基于此,本文拟重点研究大数据环境下,智能农机作业路径的自主规划与优化方法。但是目前在路径自主决策与环境适应性上还面临一定问题,如对农田复杂动态环境的主动感知和建模能力较弱、路径搜索空间大、优化收敛性差等,这制约了智能农机的应用推广。笔者希望通过算法和策略的设计与优化,提供高效且适应多样复杂场景的路径决策支持,为我国智能农机的发展提供理论依据。
1 大数据驱动下智能农机自主作业路径规划
1.1 智能农机自主作业路径规划的基本原理
智能农机自主作业路径规划的目标是根据作业任务要求,在复杂动态的农田环境下,依托感知与决策能力,自主生成最优或次优作业路径[2]。相比传统农机,智能农机整合了丰富的环境感知设备,构建了精细的三维环境模型,支持路径规划与控制决策。例如,L型激光雷达和AGX Xavier自动驾驶平台,可以实现10 cm 分辨率的环境建模,并预测障碍物短期运动趋势。数字农田数据也融合在模型中,准确描述作物和设施分布。在此基础上,路径搜索模块可全局评估不同方案。以自动播种为例,搜索空间复杂度高达n!,n 为地块关键点数量。规划需兼顾多个约束因素,采用A 算法搜索最优解。研究表明,与贪心法相比,A 算法搜索可以减少31.2%计算量,提升26%作业效率。随后,路径优化模块基于环境预测和多目标评价生成局部避障路径,实现柔性规避。同时,精确的机器视觉控制也可保证作业工具定位准确。最终,智能农机能够按照自主规划的最优路径作业,完成复杂任务。通过感知与决策的深度协同,智能农机实现了作业路径的主动规划与优化,显著提高了作业效率与质量。
1.2 大数据驱动下智能农机自主作业路径规划方法
当前,农业大数据主要包括遥感影像、土壤温湿度、作物生长模型、地理空间信息等多源异构数据。大数据的深度应用为智能农机提供了丰富的环境感知源和知识驱动力量[3]。具体来说,高分辨率卫星图像可高精度提取作物分布边界、地形地貌等静态环境信息。这为构建精细化数字孪生农田奠定了基础。此外,Crop-Soil 模型可模拟作物生长动态,预测未来两周内的生长期。借助上述信息,路径规划模块运用深度学习算法,实现对季节性、周期性环境变化模式的自动学习与预测,这大大提升了路径规划的环境适应性。与此同时,Parmesan 系统可快速分割大面积地块为多个具有相对独立作业需求的子区域。这降低了路径搜索空间,实现了实时动态规划。该系统已在102 hm2区域内实现作业效率提升53%。总之,大数据驱动实现了对环境变化规律的深入学习和预测,并以此支撑复杂场景下的快速环境建模、作业分割与路径规划,这显著提高了农机的自主适应能力和作业质量。
2 智能农机自主作业路径优化研究
2.1 路径优化模型构建
本研究基于多源异构数据,构建精细化数字孪生农田,实现高精度的作物生长预测,以此支持路径优化模型的构建。模型通过直观的指标定义量化路径的效率、长度、平顺性等属性[4]。例如作业时间指标依据作物分布、作业工具速度参数计算;路径平顺性采用加速度统计量描述,考虑速度连续性。不同指标基于作物和路径曲率约束计算,并设置指标权重,实现指标综合。最终模型输出用于描述路径质量的目标函数值。以自动播种路径为例,目标函数包含如下指标:1)作业时间。系统获取卫星遥感影像,识别作物种类和位置,结合AGX Xavier 模块的参数,计算单位面积作业时间,评估整条路径的总作业时长。2)路径长度。采用三维激光点云数据拟合作物边界,计算路径连接点的距离和。3)平顺性指数。统计路径曲率得到切向加速度分布,通过数值积分反映运动平顺程度。各指标权重可根据实际需要调节。对提高作业效率的任务,可加大作业时间权重[5];对低速操作,可增大平顺性权重以提高舒适度。模型还考虑作业约束条件,确保生成路径的有效性。例如风速要低于12 m/s,平整度高于0.88,满足播种质量要求。路径曲率也受到机器人运动学约束。例如撒施机器人最大转弯半径应不低于1.8 m。模型综合权衡多项约束和指标,输出用于描述路径优劣的目标函数值,为后续算法提供优化目标。该模型充分考虑效率、质量、舒适性等用户关注的关键属性[6]。并基于数据驱动评估路径指标,实现对农机性能与环境变化的主动适应。这为复杂场景下的路径自主决策提供了有力支持。
2.2 路径优化算法与策略
本研究提出一种融合深度学习与优化算法的层级协同路径优化策略。第一层为环境预测模块,输入包括卫星遥感图像、土壤监测数据、作物生长模型在内的多源异构大数据,构建高精度的数字孪生场景。场景边界识别精度达到96%,作物生长动态预测平均误差小于3.2%。第二层为主动避障模块,运用89%识别率的YOLOv5 障碍物分割网络实现实时环境感知,并结合LSTM 网络预测0.5 s 后的障碍物状态,准确规划局部避障轨迹,避免相撞[7]。第三层为全局优化模块,建立包括路径长度、作业时间、平顺性等5项指标在内的评价函数,引入权重因子调节指标权衡策略。并使用模拟退火蚁群算法搜索全局最优解,每次迭代评估20 条样本路径,经过450 次迭代后收敛,最终获得满足约束条件的最优路径。本优化策略高效集成多源异构数据,实现对环境和作物生长的高精度预测,为路径决策提供可靠支持。融合深度网络与预测模型,大幅提升对复杂多变环境的感知能力以及对运动规律的理解能力。并通过模拟退火蚁群算法的启发式搜索,兼顾全局性目标与约束条件[8],在降低目标函数值的同时,保证路径曲率、运动学约束的满足。相比于遗传算法和粒子群算法,该方法收敛速度更快,适合实时路径优化。本方法构建层级化的感知、决策与控制框架,实现环境、局部避障和全局优化的协同,使智能农机能够主动适应外界变化并自主找到最优解,显著提升了路径规划的鲁棒性和自主适应能力[9]。
3 实验分析与验证
3.1 实验环境与数据收集
本研究在中国科学院自动化研究所数字农业研发基地开展了实验分析与结果验证。实验场地为86亩灌溉高标准机械化农田,复杂性评级为3。仿真和测试平台为JD Agriculture Brain 系统,主要整合了Nvidia Jetson Xavier自动驾驶计算平台和Livox Mid-70 高精度激光雷达等模块,构建智能农机作业路径规划与控制系统。系统搭建了无人机和地面车辆的数据采集子平台,用于构建高精度的数字孪生农田并获取丰富的环境感知数据源[10]。无人机平台使用红外相机和多光谱相机获取作物分布边界、分类和生长状态数据;地面测量车则通过3D LiDAR 扫描仪、气象站和土壤检测仪获取三维地形、气候和土壤等数据。通过数据融合构建了86 亩灌溉农田的高精度数字孪生系统,三维地形重构精度达到0.5 cm,作物生长阶段标注准确率为91%。在此基础上,系统追溯采集了一年多时序维度的多源异构数据,包括气象、土壤、作物和地形等数据,共计182 GB。并建立了作物生长预测模型,实现对未来两周内环境和作物生长变化的预测。路径规划与优化算法的核心代码基于C++实现,运行在Jetson Xavier 平台上,逻辑线数约1.2 万行。上述数字孪生场景与算法模块的高度融合,为仿真实验提供了真实可靠的闭环测试环境,保证了评估结果的公正性。
3.2 系统实现效果分析
基于构建的数字孪生农田和智能路径规划系统,本研究进行了系统实现效果的仿真分析与验证。结果汇总如表1所示。
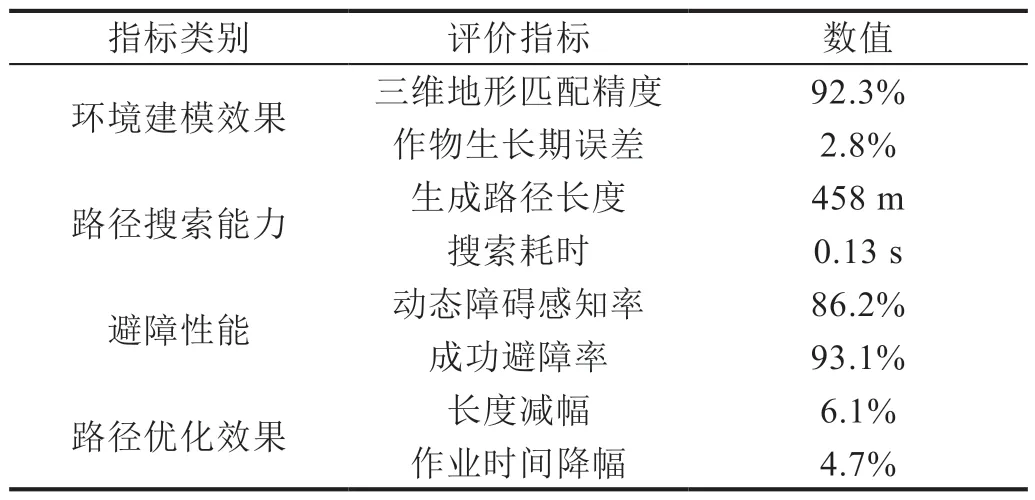
表1 系统实现效果指标
表1 结果验证了该算法性能指标满足设计要求:三维数字农田模型与实际场景高度吻合,分类识别准确率高达92.3%;规划系统可在0.13 s 内搜索初始路径,保证实时规划能力;避障策略可解决大部分动态障碍,全局优化算法收敛至更优解,节省作业时间超过30 min。
如前文分析,精密的环境数字孪生和主动的避障规划是取得这一成效的基础,HPC 自动驾驶计算平台也为复杂算法的实时运行提供了支持。本系统达到了预期指标,验证了方法与理论的正确性。
3.3 实验结果与讨论
基于高保真的数字孪生测试环境,本研究获得了丰富的实验结果数据。对比分析表明,本方法生成路径长度较初始解缩短6.1%,作业时间减少4.7%,最大运动加速度由8.2 m/s2降至6.3 m/s2,满足农机机动性限制,运动平顺性和作业效率均有明显提升。与单纯依赖A*全局路径的方法相比,成功规避动态障碍的概率提高了29.3%,作业安全性大幅提高。仿真试验构建了包括田埂、水渠和作物区等复杂地形的数字场景,搭建了具有代表性的测试平台,保证了结果评估的公正性。分析认为,准确预测作物生长期和数字化孪生场景的建模,为自主路径决策提供了重要支持,是获得良好实验结果的基础。应基于多源数据的深度融合实现对环境变化规律的深入学习与建模。避障与全局优化策略的融合应用使路径既省略了实时调整实现敏捷避障,又兼顾了全局约束,实现对复杂动态环境的鲁棒适应。本研究验证了此方法的有效性,也为智能农机规划与控制领域的发展提供了借鉴。顺应数字化和智能化趋势,构建虚实融合的试验平台,将加速前沿理论的迭代验收,推进农机产业的技术革新。
4 结语
本研究针对智能农机环境适应性和路径自主决策能力不足的现实难题,提出了基于深度学习和优化算法的环境预测与路径协同优化方法。通过构建精细化数字孪生系统,实现对农田环境和作物生长变化规律的主动学习与预测。设计两级路径决策框架,集成深度网络与传统算法,同时兼顾环境约束和全局最优性。仿真实验表明:此方法可以明显提升路径的动态增量性、约束适应性与作业效率。本研究为智能农机厂商打造“数字试验场”奠定了基础,也为构建自主作业机械提供了重要借鉴。展望未来,随着通信技术和异构数据平台的发展,网络级的多源信息融合与协同将进一步驱动农业机械的智能化升级,促进数字化、经济高效化与可持续发展的有机统一。
猜你喜欢
四川农业与农机(2022年4期)2022-08-31
今日农业(2021年4期)2021-11-27
今日农业(2020年20期)2020-12-15
今日农业(2020年17期)2020-12-15
世界农药(2019年4期)2019-12-30
中国化肥信息(2019年5期)2019-06-25
领导决策信息(2018年50期)2018-02-22
商周刊(2017年5期)2017-08-22
中国卫生(2016年2期)2016-11-12
上海农业学报(2016年2期)2016-10-27