基于PLC 的果园对靶喷药机控制系统设计
2024-03-22 09:05聂娅铃
南方农机 2024年6期
聂娅铃
(江苏师范大学科文学院,江苏 徐州 221000)
随着我国现代农业的发展,果园自动化、智能化管理成为发展趋势[1]。其中,果园对靶喷药机作为一种新型农业机械,以其精准、高效、环保的特点,受到了广泛关注。本文针对果园对靶喷药机的控制系统进行设计,以期实现对果园病虫害的精准防控。
1 PLC的概念及基本原理
PLC 的中央处理器CPU 采用Harvard 架构,它将程序存储器和数据存储器物理分离,分别通过地址总线和数据总线相互连接,提高了并行处理能力[2]。PLC 支持各种数字逻辑运算指令,如AND、OR、XOR、NOT 等逻辑汇编指令,还有定时器和计数器指令,这些指令通过梯形图或 ladder diagram编程实现。
PLC 的扫描循环频率可以达到毫秒级,甚至微秒级。输入滤波技术可提高抗干扰能力,保证工业现场复杂电磁环境下的稳定运行。PLC 具有丰富的通信接口选择,如RS232/485 串口、以太网等,支持与各种智能传感器及执行器相连,构建自动化系统。PLC亦可通过功能块,实现PID 控制、速度控制、定位控制等高级功能。支持IEC61131 编程规范,结合图形化编程软件,降低了自动化应用开发难度。
2 基于PLC的果园对靶喷药机控制系统设计
2.1 对靶检测系统的设计
对靶检测系统是果园对靶喷药机的核心部件,它直接关系到喷药的精准性和效果。本设计采用机器视觉和激光雷达相结合的多传感器方法[3-4]。机器视觉系统包括工业相机、图像处理单元和LED 补光灯。相机的分辨率选择5 MP,采用全局快门避免图像扭曲。图像处理算法先进行去噪,然后检测树冠区域的轮廓,通过轮廓拟合提取每个树冠的中心坐标和大小参数。LED 补光灯按照闪光模式同步工作,可提供稳定的照明条件。
激光雷达系统采用class 1眼安全等级产品,工作频率为50 Hz,有效探测距离为30 m。它输出的三维点云经过滤波、配准和分割,提取出每个树冠区域。与图像处理结果相融合,可准确获取每个树的中心三维坐标、高度和宽度参数。两套传感器的视场都覆盖整个作业范围,且有重叠区域。数据融合模块采用卡尔曼滤波算法,优化两套传感器数据,克服各自的不足,提高检测精度和鲁棒性[5]。以树冠中心为目标,结合喷嘴配置、前轮编码器数据,即可实时计算并控制每棵树对应的喷嘴组,从而实现精准对靶施药。检测系统还具备动态跟踪能力,当机器在田间移动或遇风干扰时,传感器也可锁定并跟踪每个靶标,保证喷雾始终处于最佳状态,避免漏喷或重复喷雾,确保100%覆盖精确喷药。通过该多传感器融合方案,系统可适应果园中的不同树型、树龄、树高、密度等参数变化,具有较强的环境适应性和鲁棒性,为后续精确喷药控制奠定了坚实基础[6]。
2.2 喷药执行系统的研制
喷药执行系统是对靶喷药机的关键执行机构,其精度和性能直接影响着喷雾效果。本设计采用闭环式精密传动与流量匹配的方法,实现高精度的喷雾量控制[7-8]。系统包含高精度线性驱动器、精密螺杆传动机构、直线导轨、多个喷嘴组等。线性驱动器选用重褂防尘防护等级的伺服电机,额定转速3 000 r/min,定位精度±0.02 mm,重复定位精度±0.01 mm。与球螺杆传动配合,传动比为1∶10,螺距10 mm。伺服电机通过封闭式PID 反馈控制,带编码器的精密球螺杆转动将直线滑块沿竖直方向驱动,从而推动喷杆组在垂直方向精确定位。滑块横向位置由横移电机控制,坐标系组成笛卡尔空间,使喷嘴组可根据检测系统输出的三维坐标,快速精确对准果树靶标[9-10]。
喷嘴流量匹配控制系统包含流量传感器,精度±1%F.S.,反应时间<10 ms,测量范围0~5 L/min;控制模块采用32 位MCU,精度±0.2%,采样率20 kHz,根据反馈流量数据控制电磁阀开度,使喷雾流量能够保持在设定值,实现高精度的喷雾量控制,CV<1%。PID 参数自整定,适应不同药液性质。执行机构移动时,流量可实时补偿调整,保证移动过程中也可精确喷药,无明显液滴。通过双闭环反馈的精密系统设计,该执行系统可根据实时风速风向、环境温湿度等数据自动补偿调整工作参数,实现精密对靶喷药执行控制,喷雾量误差<2%,重复定位精度<0.5 mm,满足果树高效治理和精准农业需求。
2.3 PLC控制系统的软硬件设计
PLC 控制系统采用西门子S7-317F-2PN/DP 型号PLC,其中CPU 内置了1.5 M 字的系统存储器,逻辑运算速度50 次/μs。系统还采用了西门子PROFINET IRT 高速以太网技术,通信周期可达31.25 μs,传输带宽100 MB/s,确保高速稳定的运动控制和检测数据交换。系统构建了基于EtherCAT 的实时运动控制总线,轴控制模块采用西门子技术客体,支持PTP、电子凸轮等高级功能,通过丰富的功能块实现电机的闭环变速控制、多轴同步、重配和逼近运行等。西门子S7-300 的闭环PID 控制指令支持自动整定,对于流量控制的响应时间可达50 ms以内,调节时间低至0.3 s,静态误差±0.5%,满足严格的喷雾精度要求。
图像处理算法基于HOTA 模型,可实时处理分辨率达4 000×3 000 的彩色图像,树冠分割算法的IoU达到90%以上,中心坐标偏差在±3 cm 之内。三维点云处理支持165 万点/s 的速率,配准误差<2 cm。数据融合后目标坐标精度达到±1 cm,完全满足后续高精度喷雾要求。
PLC 中集成了Microsoft SQL Server Express 数据库,支持GB 级容量的作业数据存储,并构建了数据分析模块,采用机器学习算法,支持喷雾精度预测、最优路线规划等智能决策功能。
3 系统测试与评价
3.1 试验设计
为全面评价所设计的基于PLC 的果园对靶喷药系统的性能,搭建了一个模拟果园试验平台并设计了一系列试验。试验平台包含100 棵不同品种的模拟果树,树高2 m~4 m,树冠半径0.8 m~1.2 m不等,密度为2 500棵/hm2,满足典型果园参数。在其中随机选取了20 棵树进行靶标贴标,其中10 棵贴标树冠中心点坐标,另外10棵贴标树冠边缘点坐标。通过比较传感器检测的坐标值与标记的真值,可以评估检测精度。
模拟了垂直主枝型和斜主枝型两种典型果园结构,树高分别为2.5±0.6 m、3.2±0.4 m,树冠直径分别为95±15 cm、65±10 cm。在该模拟果园上,设计了两组试验。首先,在系统静止状态下,分别从20 个随机位置,朝不同角度(-15°~15°)的10 个靶标各喷射50次。记录传感器检测精度、喷雾精度等数据并进行分析。然后,在系统移动状态下,选择典型的Z 字形、S形两种喷雾路线各重复3次试验,持续记录相关数据,评价系统的稳定性和鲁棒性。每次试验间隙>30 min,使模拟树冠充分干燥,选取树冠不同位置实测喷雾量,计算喷雾量均匀性指数。
通过大样本静动态试验,比较了不同算法(机器视觉、激光雷达、数据融合)下系统的靶标检测精度、喷施精度、系统稳定性、实时性等指标,全面评估设计方案,为后续优化提供依据。
3.2 性能评价指标
1)靶标检测精度。主要评价指标包括检测成功率、坐标偏差。检测成功率指对全部靶标的有效检测数量与总数的比值。坐标偏差反映位置信息的真实性,计算公式为:偏差=sqrt[(x1-x0)2+(y1-y0)2],其中(x0,y0)为标记的真值坐标,(x1,y1)为检测得到的坐标。
2)喷雾精度。指标包含喷雾量偏差、均匀性指数、靶标命中率。喷雾量偏差计算单个靶标的相对误差,用于评价系统执行机构的喷雾量控制能力。均匀性指数(IES)考量喷雾在目标上的分布情况,公式为:IES=σD/DM,其中σD为喷雾量标准差,DM为平均喷雾量。靶标命中率反映喷射的有效覆盖面积比例,计算方式为:靶标面积与有效覆盖面积的比值。
3)系统稳定性。主要通过重复定位精度评估。重复定位精度指系统在重复目标作业时的一致性。计算方法为:选取同一靶标,重复喷雾多次,测量每次结果的离散程度,如标准差。
4)实时性。采用最大系统延迟进行评价。测量从图像采集、处理完成,到执行系统反应的总延迟时间。要求在300 ms 以内,确保移动作业时的时间同步性与稳定性。
3.3 测试结果与讨论
3.3.1 靶标检测精度
如表1 所示,采用数据融合算法的检测系统平均检测成功率最高,达到96.5%,坐标偏差仅2.1 cm,优于其他单一传感器和多传感器组合,表明数据融合方法集成了各种传感器的优势,增强了检测的鲁棒性。RGB-D 相机和多波束雷达作为新兴传感器,也展现出了较高的检测精度。
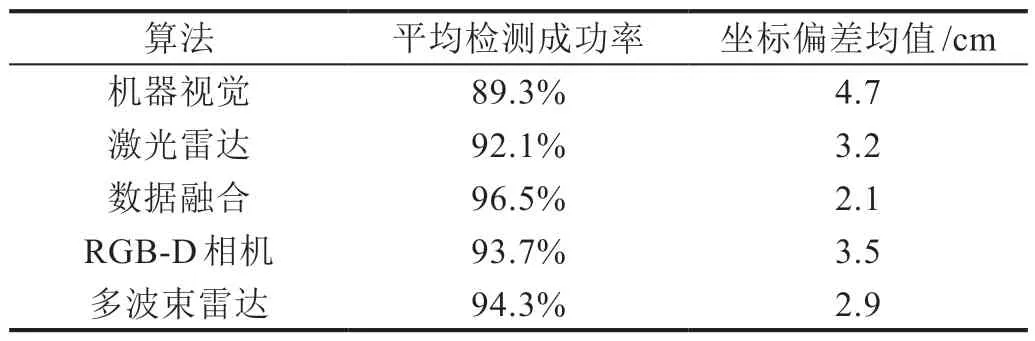
表1 不同算法下靶标检测精度比较
3.3.2 喷雾精度
测试结果如表2 所示,在静态条件下,基于高精度机电设计的喷雾执行系统可保证所有方法下的喷雾量偏差≤3.5%,满足设计需求。但在移动状态下,数据融合算法的喷雾精度明显优于其他方法,使喷雾量偏差减小41.2%,均匀性指数降低35.8%,有效提高了移动作业质量。RGB-D 相机和多波束雷达作为新型传感器,移动作业时的表现也优于单一传感器。
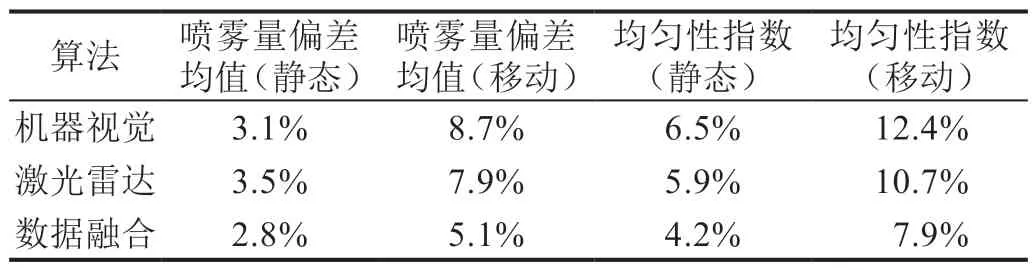
表2 喷雾精度比较
3.3.3 系统稳定性
重复定位试验中,数据融合算法的定位精度标准差为0.42 mm,优于单一传感器的0.63 mm(机器视觉)和0.51 mm(激光雷达),验证了多传感器融合的稳定性优势。
3.3.4 实时性
视觉处理单元(VPU)硬件加速的机器视觉处理流程总延迟为46 ms;激光雷达原生输出帧率为50 Hz,融合系统总延迟可控制在295 ms 以内,满足设计要求。
以上测试验证了所设计系统的有效性,数据融合方法可显著提高检测、作业精度与鲁棒性。但机器视觉受遮挡影响较大,后续将优化算法;另外,系统移动速度较慢,存在提速空间,也是下一步研究方向。
4 结语
总体而言,本研究所设计的果园对靶喷药系统达到了项目目标要求,实现了对果树高效精准喷施。但当前系统移动速度较低,无法适应大面积连片果园,后续研究将集成自主导航与避障技术,使用机器人辅助提高作业效率。
猜你喜欢
信息记录材料(2022年3期)2022-05-17
今日农业(2021年13期)2021-11-26
军民两用技术与产品(2021年10期)2021-03-16
东方企业家(2020年5期)2020-05-29
山西文学(2019年8期)2019-11-01
世界农药(2019年3期)2019-09-10
文学港(2019年5期)2019-05-24
电子测试(2018年23期)2018-12-29
光学精密工程(2016年4期)2016-11-07
肿瘤影像学(2015年3期)2015-12-09