基于滑模观测器的永磁同步电机无传感器控制
2024-03-24 14:45何用辉卓书芳葛炎风
装备制造技术 2024年1期
何用辉,卓书芳,葛炎风
(福建信息职业技术学院,福建 福州 350003)
0 引言
近年来,随着电力电子、自动控制和计算机等技术的发展,交流调速控制系统在高性能调速领域已逐步取代直流调速控制系统[1]。永磁同步电机以其功率密度高、转矩惯量比大和动态响应速度快的特点在交流调速系统中占据了主导地位[2]。永磁同步电机启动时需要确定转子初始位置,其除了作为闭环反馈信号外,还是坐标变换的依据[3]。传统控制系统多采用光电编码器、旋转变压器等机械式位置传感器获取转速信号[4]。机械式位置传感器增加了系统成本,且安装维护成本高,降低了鲁棒性和可靠性[5]。为了克服上述机械式位置传感器的弊端,无位置传感器控制技术成了电机控制领域中的一个研究热点[6]。
文献[7]为了削弱滑模观测器的抖振现象,将符号函数sign(·)用连续的sigmoid(·)替代。基于定子电阻在线估计[8],一种超螺旋二阶滑模观测器算法被用于永磁同步电机无位置传感器控制。文献[9]考虑采样通道非线性引起的电压和电流直流偏置,分析了其对电机反电动势观测和无速度传感器控制的影响,并且设计了一种基于二阶广义积分器抑制直流偏置。基于内嵌滤波器的同步旋转坐标系锁相环技术[10],有效抑制了滑模高频抖动信号对位置辨识的影响,且无需对位置辨识值进行相位补偿。然而,上述关于永磁同步电机中高速的无传感器控制都是基于两相静止正交坐标上的数学模型进行研究的[6-10],有关PMSM 在两相同步旋转正交坐标系上的无传感器研究也越来越受关注。
首先,建立PMSM 在两相同步旋转正交坐标系上的动态模型,分析角速度与感应电动势的关系。其次,应用李雅普诺夫稳定性理论设计滑模观测器得到电动势估计值。然后,引入一个低通滤波器和反正切函数提取位置信息,并对其进行补偿。最后,通过Matlab/Simulink 平台搭建系统的模型并仿真验证文中所提无传感器控制策略的有效性和鲁棒性。
1 永磁同步电机数学模型
永磁同步电机的动态模型由磁链方程、电压方程、电磁推力方程和运动方程组成,其三相静止对称坐标系上的数学模型具有非线性、多变量、高阶和强耦合的特点。通过坐标变换,可以得到PMSM 在两相同步旋转正交dq坐标系上的数学模型。为了实现变量间的解耦,应用矢量控制的思想,使电磁转矩正比于交轴电流分量iq的大小。此外,励磁磁场是由转子永磁体产生的,所以,将直轴电流分量id的给定值设为零。最终,简化后的PMSM 在dq坐标系上的数学模型如式(1)~(4)所示。
其中,ud和uq分别为d轴和q轴定子绕组的电压,Rs为定子绕组的电阻,id和iq分别为d轴和q轴定子绕组的电流,ψd和ψq分别为d轴和q轴定子绕组的磁链,Ld和Lq分别为d轴和q轴定子绕组的电感,ψf为永磁体磁链,Te为电磁转矩,pn为极对数,J为转动惯量,F为黏性摩擦系数,Tm为负载转矩扰动,ωe和ωm分别为电角速度和机械角速度,且满足ωe=pnωm。
永磁同步电机的无传感器控制是基于电气系统动态实现,对于表贴式PMSM,定子绕组电感满足Ld=Lq=Ls,因此,由式(1)和(2)可得
将其写成状态空间的形式,即
其中,Ed= 0 为d轴的感应电动势,Eq=ωeψf为q轴的感应电动势,其表达式中包含了PMSM 的角速度信息。
由于滑模控制是一种鲁棒性很强的非线性控制技术[11],下面将设计滑模观测器提取永磁同步电机的角速度和位置信号。
2 滑模观测器设计与无传感器控制
将基于电流估计值与采集的反馈电流之间的误差设计滑模观测器,由此重构PMSM 的电动势,从而估算PMSM 的角速度和位置。
2.1 滑模观测计与分析
根据状态方程(6),设计如式(7)所示的滑模观测器。
其中,k为滑模控制增益,sign(·)为符号函数。
应用李雅普诺夫稳定性理论对设计滑模观测器进行分析。
定理1 对于设计的滑模观测器(7),如果控制增益满足如下条件:
那么,滑模观测器是稳定的,且系统进入滑动模态后,存在如下的等效控制律:
证明 定义d轴和q轴的电流观测误差分别为
联立式(6)(7)和(11)可得,滑模观测器误差系统的动态方程为
定义滑模面函数为
构造如下所示的李雅普洛夫函数:
由此可知,能量函数V(S)正定。
对V(S)求时间的导数,即
联立式(8),(11)~(13)和(15)可得式(16)。
为了保证式(16)满足V˙(S)≤0,可得
即式(9)得证。
当系统进入滑动模态后,可以采用等效控制方法确定滑模运动[12],即令
由于观测器是稳定的,因此当系统进入稳态后,角速度估计误差趋近于零。联立式(12)和(18)可得,等效控制律如下所示:
即式(10)得证。
2.2 基于反正切函数的位置估计
由2.1 节的定理1 可知,电动势的值为滑模控制律的大小。由于滑模控制中存在符号函数,会产生高频的切换信号,即抖振现象,导致无法提取角速度信号的有效值。为此,对电动势引入一个如下所示的低通滤波器:
其中,ωo为低通滤波器的带宽。
联立式(8)(10)(11)和(20),可得
由于q轴的电动势中包含了角速度信息,那么转子角速度的估计值为
由于电动势的估计引入了低通滤波器,会导致电动势相位延迟。因此,基于反正切函数arctan(·)对转子位置估计值进行补偿,其表达式为
综上所述,基于滑模观测器的位置估算原理如图1 所示。
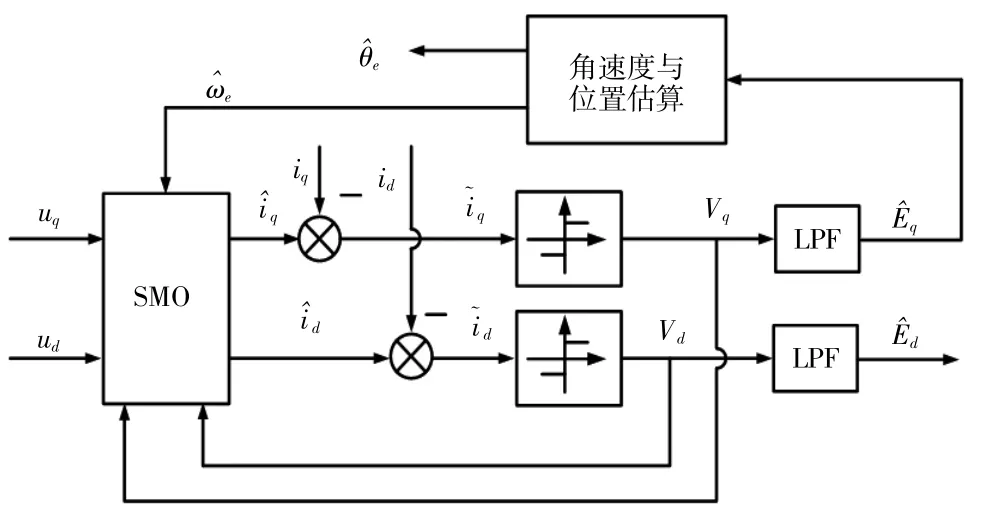
图1 基于SMO 的估算原理
3 仿真验证
为了验证所提永磁同步电机无传感器控制策略的有效性和鲁棒性。通过Matlab/Simulink 平台搭建系统的模型并进行仿真实验。永磁同步电机的参数见表1。滑模观测器(SMO)、低通滤波器(LPF)参数设置见表2。永磁同步电机采用双闭环矢量伺服控制,其速度环(外环)及电流环(内环)均采用经典的PI 控制器(带限幅),其参数设置见表2。其中,电流环带宽为ωc,电流环控制器增益由ωc确定。

表1 永磁同步电机参数设置

表2 SMO、LPF 和控制器参数设置
系统仿真条件设置如下:运行时间为0.1 s,PWM波频率为10 kHz,给定转速1500 r/min,直流侧电压311 V,仿真求解器为固定步长ode3 算法,基本采样时间为1 × 10-6s。经过低通滤波器的电动势估计值波形如图2 所示,由图2 可知,滑模观测器的抖振现象被削弱了,d轴与q轴电动势在稳态时分别为零和常值,这与前面的分析结果一致。永磁同步电机角速度和转子位置的估计曲线分别如图3 和图4 所示,所提控制策略实现了对角速度和转子位置的精确估计,且稳态时角速度估计误差趋近于零。
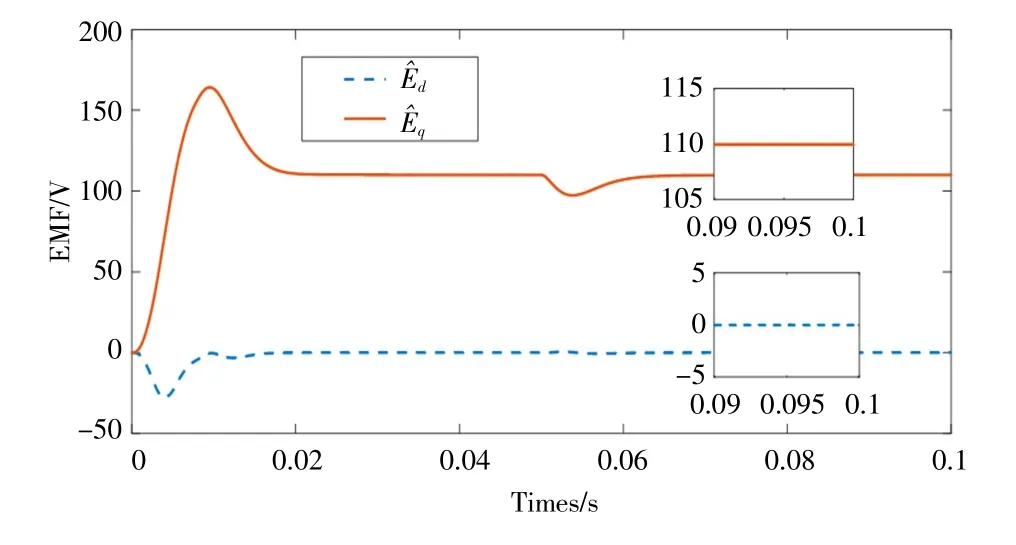
图2 电动势估计曲线
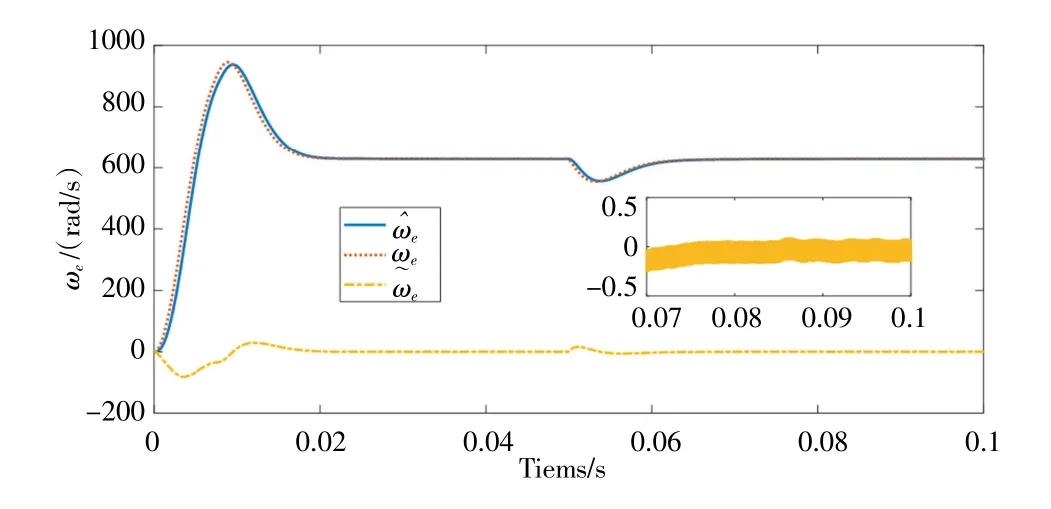
图3 角速度估计曲线

图4 转子位置估计曲线
为了验证系统的鲁棒性,在0.05 s 施加一个10 N·m的负载扰动,从图2~图4 可知,无传感器控制系统在受到扰动时,能够快速恢复稳态,具有抗干扰能力和鲁棒性。
4 结语
永磁同步电机无传感器控制方法基于滑模观测器,引入低通滤波器,通过反正切函数对角速度和转子位置进行估计。该研究的新颖性在于:
(1)传统的无传感器控制都是基于两相静止正交坐标上的数学模型进行研究,本研究建立了PMSM 在两相同步旋转正交坐标系上的动态模型,并以此进行无传感器控制研究。
(2)基于李雅普诺夫稳定性理论分析并设计了滑模观测器,对其稳定性进行了严格的证明,并得到滑模控制增益的约束条件。
(3)引入低通滤波器削弱滑模控制固有的抖振,同时基于反正切函数对其带来的相位延迟进行补偿。
(4)所提无传感器控制策略可以实现角速度和转子位置的准确估计,能有效降低扰动对控制系统性能的影响,具有极强的鲁棒性。
猜你喜欢
高中数理化(2023年8期)2023-09-07
防爆电机(2020年6期)2020-12-14
电气电子教学学报(2018年3期)2018-10-11
机电信息(2018年6期)2018-03-05
中学物理·高中(2016年12期)2017-04-22
光学精密工程(2016年3期)2016-11-07
新高考·高一物理(2015年6期)2015-09-28
电测与仪表(2015年8期)2015-04-09
大电机技术(2015年5期)2015-02-27
组合机床与自动化加工技术(2014年12期)2014-03-01