基于无人机的可隔离污染吸取式水样采集系统设计
2024-03-26 04:40袁梓鑫梁文熙
人民珠江 2024年2期
袁梓鑫 梁文熙

摘要:目前广泛使用的水样采集设备和流程存在操作员感染病毒的风险,在离岸较远的点位取样效率较低。针对这些问题,设计了一种新型可隔离污染的水样采集无人机系统,提出了无菌采集方案和分电系统设计方案。设计的采样系统在试验中通过对比测试确定了最佳方案,并完成了官厅水库采样试验和采样稳定性试验。该系统工作稳定可靠,能够有效隔离污染、提升效率,适用于水环境研究、环境执法取证、水数据收集、应急污染追踪等多种用途。
关键词:无人机;水样采集;水体病毒;隔离污染;环境卫生
中图分类号:X832文献标识码:B文章编号:1001-9235(2024)02-0076-08
Design of an Unmanned Aerial Vehicle-Based Pollution-Isolating Suction Water Sampling System
YUAN Zixin,LIANG Wenxi
(Beijing Normal University,Zhuhai (BNUZ),Zhuhai 519070,China)
Abstract: At present,the widely used water sampling equipment and procedures pose a risk of operators being infected with viruses,and the sampling efficiency is low in remote offshore points.In view of these problems,a new unmanned aerial vehicle (UAV) system for pollution-isolating sampling has been designed, and the design scheme of a sterile collection and power distribution system has been proposed.The designed sampling system has identified the optimal scheme through comparative testing in experiments and completed sampling tests at the Guanting reservoir and sampling stability experiment.The system works stably and reliably,effectively isolating pollution and improving efficiency.It is applicable for various purposes such as water environment research,environmental law enforcement and evidence collection,water data collection,and emergency pollution tracking.
Keywords:unmanned aerial vehicle (UAV);water sampling;water viruses;isolation of pollution;environmental sanitation
水樣采集一直是环境监测、污染治理、排污执法中重要的一环[1]。仅靠传统水样采集桶人工采样的方式存在效率低下的问题,能提升水样采集效率的新技术手段长期以来被研究者所关注。耿家乐等[2]设计了一款基于Arduino的水面智能垃圾清理与水样采集机器人,能够自动识别水面垃圾并按照既定轨迹进行避障行驶。金久才等[3]基于自研发的无人船系统,设计集成了采水泵,利用无人船位点跟踪技术实现了远距离定点遥控采水样功能。
研究表明,病毒会随人体排泄物排出体外,进入生活污水[4]。对污水中病毒污染物的检测是追踪新冠病毒蔓延情况的有力手段,但这种追踪手段需要采样员接近含有有害病毒污染的水体[5]进行采样工作,接触和维护被大面积污染的采样工具,使采样人员暴露在危险之中。丁珵等[6]认为现阶段无人机环境水体采样装置多应用在环境水体日常监测领域,利用智能化采样设备自主采集水体水样,能节省人力,提高应急工作效率,避免造成二次污染,同时能保障应急人员的人身安全。王珺瑜等[7]提出对废水、娱乐水域和饮用水中的2019-nCoV进行长期监测和定量风险评估。韩宁等[8]检测24份深圳茅洲河河水标本,提出诺如病毒在环境水体和人群中于某种程度上存在循环传播。水体中存在的致病微生物让使用传统取样工具或无人船取样的方式存在操作员感染的风险。水体采样无人船的使用维护过程繁琐,在采样前需要操作员徒步接近水体释放船只,在采样后需要对船只进行清洁消毒,在野外的环境下使用较为不便。
国家“十四五”规划中明确要对环境水体进行治理,全国各地开展多项针对非法排污的专项整治行动。目前在污染水环境案件中,执法行动面临线索发现不易、取证困难的难点,非法排污证据容易被犯罪分子销毁隐匿,执法者难以及时有效地固定证据[9],执法部门迫切地需要一个快速高效且部署灵活的取证工具。刘国洋等[10]将现场水泵采样的数据通过无人机上搭载的STM32微处理器进行处理后,用GPRS网络发送至服务器端。李永生等[11]设计了无人机摄影测量技术在矿产开采执法监察中的技术方案。
本文提出一种新型可隔离污染的水样采集无人机系统。该系统采用创新的吸取式采样装置,与污水接触部分可控,样品封闭保存,完成采样后无需对无人机进行清洗消毒,仅需更换一次性采样管道,隔离了污染,提升了采样效率;相比船只,受水流影响小,可以根据预定经纬度坐标自动精确定点采样,可完成对江中心流的采集,对各流速梯度的浓度分布提供数据[12]。作为环境执法设备,可直接飞抵数千米外的执法现场,迅速完成采样、录像取证过程。
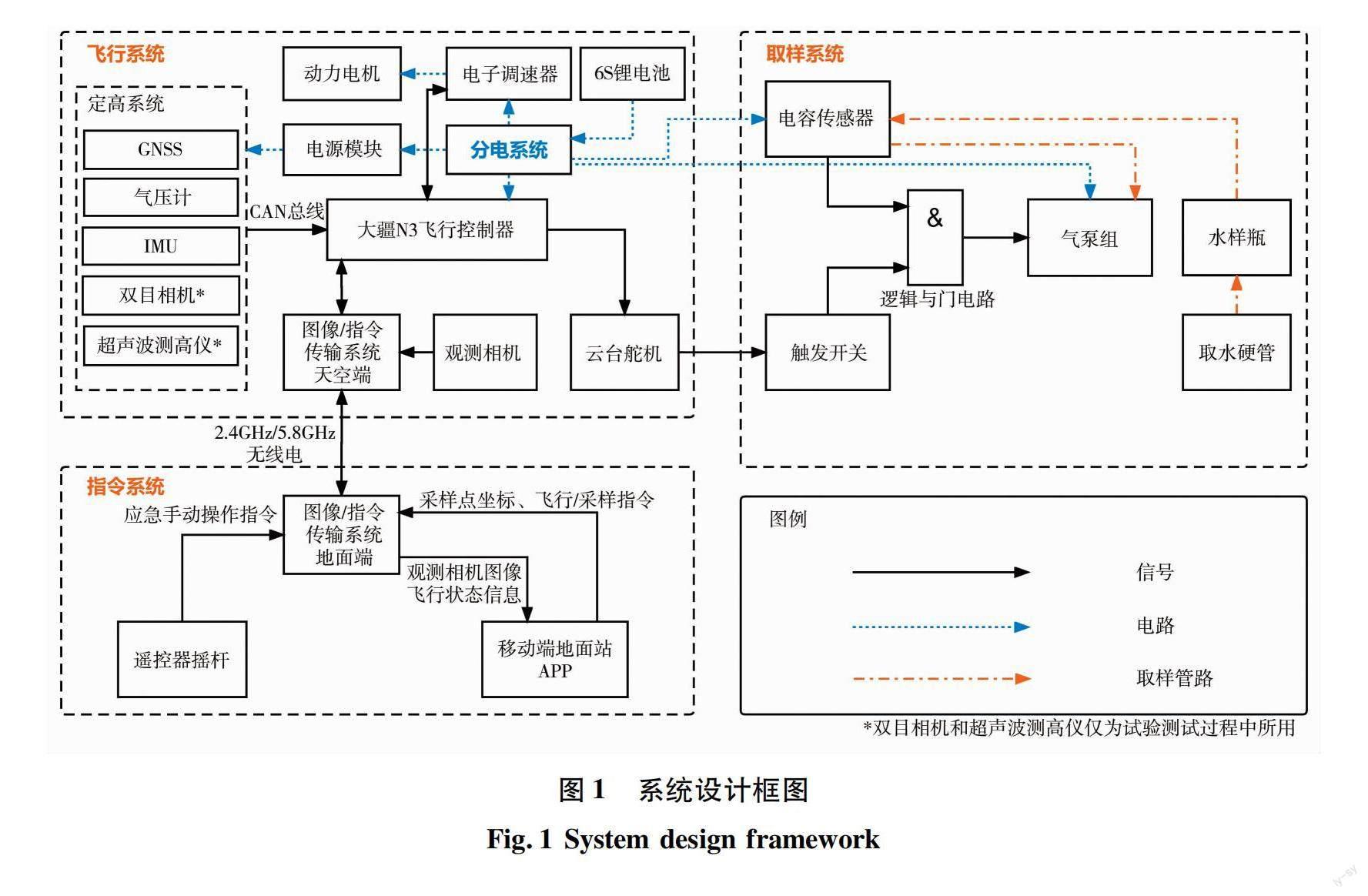
1 系统设计
水体采样无人机分为3个主要系统:飞行系统、取样系统、指令系统,见图1。指令系统为地面操作终端,通过2.4 GHz或5.8 GHz无线电信号与飞行器通信,飞行系统通过定高系统进行水面定高,通过飞行控制器上的PWM接口驱动舵机操作取样系统。分电系统将锂电池的电能进行变压、整流,分配给各个组件使用。电容传感器和触发开关经过一个逻辑与门电路控制气泵组的启停,当采样瓶装满时,安装于瓶口抽气管上的电容传感器会被触发关闭,气泵组被关停,将污水限制在一次性管路内。
1.1 分电系统设计
1.1.1 控制器选型
本项目无人机需要因由多个子系统构成,而每个子系统需要的电压并不相同,因此需要电源管理系统给各子系统提供标准稳定的电压。无人机对质量比较敏感,因此电源管理系统硬件需要尽可能轻,以节省无人机有限的电能。
本系统选用了TI公司的LM25116同步Buck电路管理芯片,该芯片能实现最高1 MHz的开关频率,能把DC-DC电路的体积控制得比较小,该芯片使用同步整流技术减少了传统BUCK电路中二极管的损耗以达到更高的效率,最高效率可达到95%。
1.1.2 电路设计
本设计选择开关频率为800 kHz,能同时达到效率和体积的要求。2只开关管选用SIR172A,该型号MOS管输入电容小适用于高开关频率的DC-DC电路同时拥有体积较小的封装体积,85 mΩ的导通电阻,1 515 pF的输入电容,因此适用于本电路。
选用MLCC电容结合电解电容可以获取小的体积和更轻的质量,MLCC电容比电解电容有更好的高频特性,使用MLCC电容能使DCDC电路输出的纹波更小。电感采用全屏蔽一体成型电感,该电感能减少漏磁提高电路的转换效率和减少电路对周围其他电路的干扰,提升EMC性能,最终电路原理见图2。
系统需要3个不同的电压(5、12、18 V),因此需要3组BUCK电路组成电源管理系统,每组同步BUCK电路设置为相应电压即可。
开关频率f=800 kHz,输入电压Ui=25 V,输出电压Uo=12 V,输出电流Io=5 A,此时输入电流为Ii=2.68 A,计算效率大约为93.2 %,纹波电压为50 mV,测试时长2 h可以稳定运行。
1.2 采样系统设计
防污染取水样装置按污染与否分为无污染的取水泵组和接触、存储水样的储水装置两部分。高价值的驱动装置和控制部分固定在飞行器机身上,多次使用。而受到污染的储水装置包括管路和水样瓶、取水管为低价值消耗品,设计为一次性使用。
使用创新设计的快拆结构将两部分相隔离,操作员无需触碰与污水接触的部分,通过水样采集装置无污染的外壳,可将一次性使用的储水装置卸下。管路与取样瓶融为一体的整体化设计让准备时间更短,可以实现在1 min内再次起飞取样。图3所示,将飞行器悬停于水面预定的高度通过吸取的方式,通过使用一根4 mm×6 mm×1 000 mm硬质PVC水管抽取水样,有利于减少水面杂物影响。
研究设计了3种采样器方案:方案A使用隔膜泵进行取样;方案B使用医用针筒,使用经过有限元优化的3D打印结构制作的驱动装置;方案C使用蠕动泵,具有创新的快拆结构设计。
1.2.1 隔膜泵水样采集装置设计方案
隔膜泵水样采集装置设计方案为方案A,采用图4所示的2个隔膜泵进行取样,通过一根1 m长的硬质PVC管和硅胶管线将样品抽取到新开封的PET包装饮用水水瓶中。使用一个电容传感器安装于水样瓶瓶口,在水样装满并抽至瓶口管路时,电容传感器将被触发,令水泵电源瞬间切断,将受到污染的水样控制在硅胶软管之中,不进入水泵。
方案A优点在于耗材便宜易得,抽取速度快,所用12 V隔膜水泵为成熟货架商品,维修零件易得。缺点在于从系统中分离取回样品时需要进行拆卸工作,准备时间较方案B和C更长。
1.2.2 注射器水样采集装置设计方案
注射器水样采集装置设计方案为方案B,见图5,采用注射器安装入一个由高韧PLA材料3D打印制作的燕尾夹式注射器安裝座与注射器推动块、T5×150 mm丝杆、T5法兰盘组成的注射器推动系统,由一个直流减速M30-12-200电机提供推动动力。方案B通过推动注射器活塞的方式进行取样。
方案B优点在于准备时间短、装卸时间快、操作直观、耗材易得且成本低。缺点在于丝杆减速电机结构推力有限,使用更大直径的针管进行取水时无法满足所需推力,且针管内常涂有润滑用的硅油,在涉及有机物的取样分析中可能会干扰分析结果。
1.2.3 快拆式蠕动泵水样采集装置设计方案
方案C见图6—8,使用一个创新设计的快拆式蠕动泵作为水样收集装置。该蠕动泵具有可快速拆卸分离的泵盖和泵壳,其中电机、泵轮等高价值部件连接在泵盖上重复使用,水样袋盖和管路系统等低价值部件集成在泵壳中,连接一个标准水样采集袋一次性使用。系统使用大疆M2006无刷减速电机和C610电子调速器提供动力。
方案C优点在于取样泵直接连接标准水样采集袋,取到的水样无需进行再次转移,相比其他2个方案更好地保护了操作员。结构结实可靠,连续取样稳定性好。缺点在于造价较为昂贵,且一次性使用的部分为非标零件,需要进行定制,较其他2种方案更难获得。
2 试验及分析
2.1 采样器方案对比试验
方案A抽水稳定速度快,仅用24 s就完成了取样,是3个方案中最快的,由于方案A使用通用规格的饮用水水瓶盖,可以换用不同规格的饮用水水瓶实现灵活适应不同需求的取样量。但方案A准备时间较久,需要对操作员进行培训才能熟练使用。
方案B抽水速度较快,29 s完成取样,试验发现,由于丝杆减速电机体积和功率的限制,难以选择容量更大的注射器进行取样。由于减速齿轮箱具有齿间隙,丝杆存在轻微虚位,经过多次取样试验后,丝杆齿轮箱存在轻微变形,轻微变形累积后会使丝杆对活塞施加的推力方向偏离注射器中轴线,令推力的一部分分力施加在注射器筒壁上,导致注射器活塞和筒壁摩擦力增大,所需推力增加,最终导致结构失效,故方案B的稳定性较差。
方案C抽水速度最慢,但结构坚固、拆装方便,还可以直接将水样泵入收集袋中。但方案C使用和制造成本均为最高,相比其他2个方案,方案C的耗材是定制零件,不易取得。
2.2 采样稳定性试验
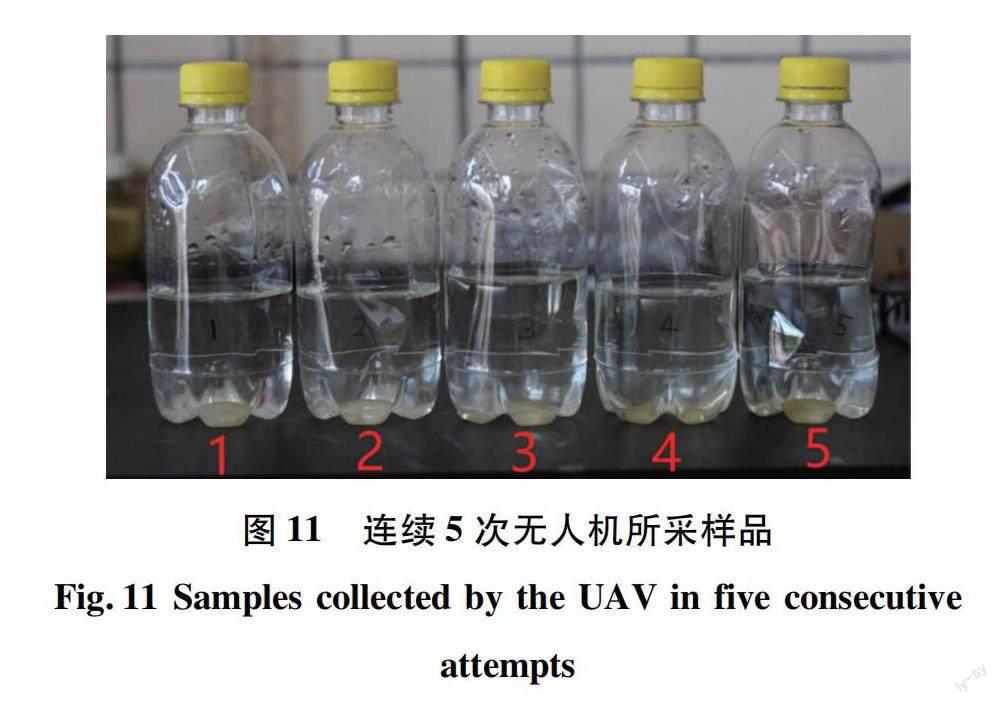
使用本项目水体采样无人机在广州市番禺区陈边水闸进行采样稳定性试验,试验环境见图9。试验进行5次采水样任务并记录采样时间、取样后更换耗材的整备时间以及采集的水量,见图10、11。并使用传统采样桶进行相应次数的采样任务并记录数据(图12)。最后对比试验数据,证明水样采集无人机的稳定性以及可靠性。
使用量筒测量水样体积,获得的数据见表1,在连续5次实地采样测试中,采样时间、更换时间、采样量的数据保持稳定;各次采样量均达到100 mL的要求。可知水样采集无人机工作稳定可靠。
通过多次采样发现,实际采样量约为采样瓶容积的49%,这是因为使用了成本低廉易得的300 mL一次性PET塑料瓶,采样过程中气泵组产生的负压会将瓶身一定程度地压扁,减少了有效的容积。在实际取样工作中可以按照需求换用不同容积的取样瓶(图13),以适应不同取样量的需求。
通过对比传统采样方式发现,传统的采样桶只能在岸边或乘船采集水样,而水样采集无人机仅需在移动端地面站指定采样位置,无人机即可自动前往采样点进行采样。若采样任务需要在河中心或在一些复杂的沼泽地形进行,相比于传统的采样方式,使用本系统采样则拥有较大的优势,能快速高效地在复杂地形情况下采取水样。
见图14,相比传统采样方式需要将采样器整个浸入污水中,水体采样无人机的采样机构浸入污水的部分仅为吸水硬管的末端,且为一次性使用设计,在使用后仅需和管路系统整体拆下丢弃即可,省去了传统采样桶繁琐的清洁处理步骤,也减少了二次污染。
2.3 实地采样试验
根据水样采集的需求,选在河北省官厅水库进行水样采集的实地测试。该地区环境见图15,采样点与公路之间有一片约200 m距离的滩涂地相隔,滩涂地沼泽遍布、泥土松散、还有芦苇等植物丛生于其中,这是常见的一类野外取样环境。传统方案如人工持取样瓶取水样需要采集者冒着很大的危险穿越上述障碍,艰难接近水体采样点。本方案在此测试环境中凸显了飞行取样的优势,可以安全快速地飞跃滩涂地完成取样任务。飞行器进行展开之后即可快速起飞进行采样任务,见图16。图17所示,飞行器起飞后快速飞跃滩涂地障碍,根据预定GNSS定位坐标飞抵采样点,开始快速采样,然后带着水样安全返航,降落在平坦的路面上,上述过程见图18。
2.4 试验结果分析
使用无菌采集A方案最合适本无人机水样采集系统。电路在测试过程中工作稳定,发热量低,符合本项目无人机的需要。该系统进行了数次实地采样试验,结果稳定可靠,证明了试验设计的合理性。该方案组合能够完成预定的设计指标和采样任务。
3 结论与展望
3.1 结论
经过试验验证,本文提出的水体采样无人机能完成水体采样的任务。经过多次测试和试验,水体采样无人机工作稳定可靠,能够完成对离岸较远目标点的水样采集。
相比传统取样器存在样品易抛洒、作业后需清洁存在二次污染风险的问题,水体采样无人机创新设计的采样装置通过吸取采样的方式和封闭式样品瓶进行了解决。
在离岸采样场景中,传统方式需要借助有人船或无人船采样,操作员需徒步跨越岸边障碍接近水体进行船只收放操作。而水体采样无人机只需在地面站输入预定采样点坐标,即可从平坦公路起飞直达采样点进行采样,相比传统方式提升了效率。
本文提出的水样采集无人机具有创新性,为水环境研究者提供了一种新型的采样工具,也为执法者提供了一种可以快速固定排污证据的设备。将无人机系统应用在环境领域中,解决了实际采样作业过程中遇到的問题,同时也为无人机的多用途应用提供了一种参考。
3.2 展望
下一步工作将升级环境感知系统的传感器,双目相机-超声波模块更换为固态激光雷达,借助高精度的成像解析力,增强无人机的环境适应性、智能化水平。设计并制作可进行自动充电的配套自动化机库,实现定时多点水质监测和水数据的无人化收集。
在该系统的扩展应用方面,文献[13]认为目前缺乏公开、高密度、数字化、高质量、持续更新、连续、标准化、长时间序列的每日甚至每小时的不同指标水数据。其采用模块化设计采样系统,在低威胁的环境可以装备该团队设计的基于4G蜂窝网络通信的水质传感器[14],结合预定GNSS坐标进行航点飞行,对自然水体以大面积均布点的方式对水质参数进行自动化原位测量。可结合云端服务器,使用手机APP进行自动化数据整理和标记,如采集时间和采集坐标等元数据信息,用于传统方式难以实现的大面积数据收集工作,可完成自然条件较差地区的水域环境连续监测,提高所收集水数据的质量,降低水质监测成本。该系统的推广使用可从技术层面上推动中国水数据的收集和共享。
将取水样装置换成气体取样分析装置,进行空气质量应急监测[15]、不合规排放的执法取证[16],亦有较好的效果,可广泛用于各环境监测机构,具有广阔的市场前景和经济效益。
参考文献:
[1]唐宇超,孙永生.警用无人机辅助重大传染病型公共卫生事件防控:基于信息的视角[J].城市与减灾,2021(1):9-13.
[2]耿家乐,胡立夫,马溥临,等.基于Arduino的水面智能垃圾清理与水样采集机器人[J].工业仪表与自动化装置,2020(2):131-135.
[3]金久才,崔文连,张杰,等.无人船系统应用于水库水样离岸采集:以棘洪滩水库为例[J].海洋科学,2018,42(1):11-14.
[4]宋欢,许秋瑾,王建明.水体中肠道内病毒污染对公众健康影响的定量风险评价概述[J].现代预防医学,2018,45(17):3093-3097.
[5]郑祥,张巍,石磊,等.新型冠状病毒在水环境中潜在传播途径与风险控制关键节点[J].环境保护,2020,48(S2):87-89.
[6]丁珵,丁培,刘悦,等.基于无人机技术的环境水体自动采样装置设计思路[J].中国卫生工程学,2019,18(6):947-949.
[7]王珺瑜,赵晓丽,梁为纲,等.环境因素对病毒在水体中生存与传播的影响[J].环境科学研究,2020,33(7):1596-1603.
[8]韩宁,汪东篱,张海龙,等.深圳地区环境水体和人群中诺如病毒监测与分析[J].微生物学通报,2016,43(10):2166-2171.
[9]薛培,王煜.污染水环境案的办理难点及应对:以四川省成都市为例[J].中国检察官,2018(22):49-53.
[10]刘国洋,王宇,魏茂源,等.基于无人机技术的水质监测采样装置[J].电子测试,2016(8):23-24.
[11]李永生,賴华荣,卢春盛,等.无人机摄影测量技术在矿产开采执法监察中的应用[J].测绘通报,2017(S1):95-99.
[12]武周虎.考虑河流流速和横向扩散系数变化的污染混合区理论分析及其分类[J].水利学报,2019,50(3):323-334.
[13]LIN J Y,BRYAN B A,ZHOU X D,et al.Making Chinas water data accessible,usable and shareable[J].Nature Water,2023(1):328-335.
[14]肖璟博,陈敏,刘云涛,等.水质监测传感器数据采集节点的设计和实现[J].浙江大学学报(工学版),2017,51(7):1446-1452.
[15]莫汶政,邹颖通,黄乔芸,等.塑胶运动场空气污染物的无人机采样与便携式气相色谱-质谱分析[J].质谱学报,2023,44(2):251-258.
[16]王耀东.多无人机协同检测港口船舶大气污染路径规划[D].大连:大连海事大学,2021.
(责任编辑:向 飞)
猜你喜欢
环境卫生工程(2021年5期)2021-11-20
环境卫生工程(2021年4期)2021-10-13
环境卫生工程(2021年3期)2021-07-21
小天使·一年级语数英综合(2020年9期)2020-12-16
环境卫生工程(2020年3期)2020-07-27
中国生殖健康(2019年5期)2019-01-06
人间(2016年26期)2016-11-03
科技视界(2016年22期)2016-10-18
企业导报(2016年9期)2016-05-26