含执行器故障的切换非线性系统的事件触发自适应模糊容错控制*
2024-04-03 02:29王芳李实王荣浩
动力学与控制学报 2024年1期
王芳 李实 王荣浩
(1. 南京师范大学 电气与自动化工程学院,南京 210023)
(2. 陆军工程大学 国防工程学院,南京 210007)
引言
近年来人们对非线性系统的关注度越来越高,大量控制方案已被广泛研究[1-4].文献[5]将严格实用稳定性相关概念推广到具有控制输入的非线性奇异系统,利用两个Lyapunov函数和比较原理得出该类系统严格利用稳定及严格实用渐进稳定的充分条件;最近切换非线性系统的稳定性分析以及控制器设计逐渐成为研究热点[6-8].文献[6]研究了一类单输入单输出切换非线性系统输出与扰动的解耦问题,提出了此类系统输出与扰动的完全解耦的充分条件;文献[7]为基于切换规则为时间依赖型的切换非线性系统设计了观测器,保证了系统稳定性;文献[8]研究了典型非线性广义系统的状态反馈控制器和观测器设计问题.
在实际应用中,许多切换非线性控制系统存在系统带宽和通讯资源有限的问题.如何节约通讯资源成为另一研究热点.针对这一问题,文献[9]研究一类输入饱和的切换非线性系统的事件触发输出反馈控制问题,设计了基于降维观测器的输出反馈控制器,保证了闭环信号全局有界;文献[10]设计了一种自适应非线性干扰观测器,用于任意切换非线性系统的事件触发跟踪;基于驻留时间条件,文献[11-13]研究了切换非线性系统的事件触发控制问题, 所提出的方案在保证系统稳定性的同时排除了Zeno现象.文献[14,15]研究了基于平均驻留时间约束的切换非线性系统, 设计了事件触发控制器并导出了系统稳定所需要满足的平均驻留时间条件.文献[16]针对一类切换非线性系统的周期事件触发控制展开了研究, 给出了输出反馈周期事件触发控制方案,保证了系统在任意切换下的稳定性.文献[17]研究了含有未知控制系数的切换非线性非严格反馈系统,设计了一个公共的降维观测器及带有离散事件触发控制器的输出反馈周期事件触发控制器,使通讯资源的利用降低.
以上研究是在执行器正常工作前提下展开的,但是实际控制系统,由于外部环境或自身因素影响,执行器在实际运行过程中可能发生故障.文献[18-22]针对不同类型系统,研究了容错控制方案;文献[23]研究了包含未知扰动和执行器故障切换非线性系统,设计了鲁棒H∞可靠控制器,使系统在任意切换下全局二次稳定.文献[24]研究了切换非线性大系统的输出反馈自适应事件触发容错控制问题,设计了新型自适应容错事件触发控制器,保证了闭环信号有界.需要指出的是上述结果都是基于公共Lyapunov函数研究的,但是据作者所知针对含有平均驻留时间约束的切换非线性系统容错事件触发控制问题研究却鲜有报道,本文主要提出了3个具有挑战性的问题:(1)若切换非线性系统包含执行器故障,如何设计容错事件触发控制器来克服执行器故障带来的影响同时节约系统通讯资源?(2) 如何为每个子系统设计状态观测器?(3)如何选取平均驻留时间条件,使闭环系统所有状态有界?本文针对以上问题展开研究,主要内容如下:
(1) 与已有文献[11-15]相比,本文考虑的系统中包含执行器故障,为了有效地实现容错控制,我们引入坐标变换将原系统转换为新系统,并设计出模态依赖的状态观测器与控制器.
(2) 不同于文献[18,21]设计的控制器,为了节约控制系统的通讯资源,本文设计了一种新颖的自适应输出反馈事件触发容错控制方案.
(3) 文中设计了一种新型事件触发机制,该机制可以有效避免切换发生在触发区间内,导致的控制器模态和系统模态不匹配的现象对系统稳定性的影响.
1 问题描述
考虑如下切换非线性系统:
(1)

由于外部环境或自身因素影响,执行器在实际运行过程中可能发生故障.在本文中,执行器的故障模型[9]被描述为:
(2)


引理1[26]切换信号有平均驻留时间τa>0,若存在常数N0>0则存在:
引理2[27,28]基于集合Ωz存在连续函数F(Z),对于任意∂>0,令L为模糊规则数,存在模糊逻辑系统ΘTΦ(Z)满足:
其中
Z=[Z1,...,Zn]T,
Θ=[Θ1,...,ΘL]T,Φ(Z)=[φ1(Z),...,φL(Z)]T,
F(Z)=ΘTΦ(Z)+μ(Z),

引理3[29]对于∀η>0,x∈R函数tanh(·)满足

本文的控制目标是为系统(1)设计输出反馈自适应模糊事件触发控制器,保证其对应的闭环系统所有状态半全局一致最终有界.
2 主要结果
2.1 观测器设计
由于状态未知,我们引入如下的坐标变换:
ξi=xi/ζ,
(3)
其中i=1,…,n.
由公式(3),系统(1)可以描述为:
(4)
其中
设计状态观测器如下:
(5)

是Hurwitz矩阵.
由式(4)和式(5)可得:
(6)
其中
Fσ(t)(ξ)=[f1,σ(t)(ξ1)+b1,σ(t)(1-ζ)ξ1,…,
Dσ(t)(t)=[d1,σ(t)(t),...,dn,σ(t)(t)]T,
注2由于系统(1)的执行器中未知,我们针对系统直接设计观测器存在一定的难度.因此,我们引入坐标变换(3),将系统(1)转换为系统(4),并由此设计模态依赖的状态观测器(5).
2.2 事件触发控制器设计
基于观测器(5),首先定义坐标变换如下:
(7)
其中αi-1为虚拟控制器.
当σ(t)=k表示第k子系统激活.
第1步: 选择Lyapunov形式为:

(8)
进而可得:

(9)
根据引理2得:

θi=max{‖Θi,k‖2:k∈M},i=0,1,2,...,n,
(10)


(11)

(12)
其中

(13)


由Young’s不等式可得:

(14)
(15)
设计虚拟控制律和自适应律:
(16)

由Young’s不等式得:
(17)
将式(12),式(14)~式(17)代入式(13)得:
(18)

第2步: 选择Lyapunov函数形式为:
其中r2>0是设计参数.对其求导得:
(19)

(20)
(21)
其中b2=maxk∈M{b2,k}.
将式(18),式(20)和式(21)代入式(19)得:
(22)
其中
根据引理2得:
其中μ2,k(Z2)为逼近误差.
利用Young’s不等式,有:

(23)
设计虚拟控制律和自适应律:
(24)
其中

(25)

第j步: (3≤j≤n-1)选择Lyapunov形式为:
(26)
其中rj>0是设计参数.
对其求导得:
(27)
其中
(28)
利用Young’s不等式可得:
(29)
(30)
其中bj=maxk∈M{bjk}.
令

设计虚拟控制律和自适应律:
(31)

将式(29)~式(31)代入式(27)得:
(32)

步骤n: 选择Lyapunov函数形式为:
(33)
其中rn>0是设计参数,对其求导得:
(34)
其中
令

(35)

(36)
(37)
其中bn=maxk∈M{bn,k}.
设计虚拟控制律和自适应律为:
(38)
(39)

将式(36)~式(39)代入式(34)得:
(40)

设计事件触发控制器:

(41)
u(t)=ϑ(tp),∀t∈[tp,tp+1),
(42)
tp+1=inf{t∈R||ε(t)|≥βk|u(t)|+
γ2,korσ(t)≠σ(tp)},
(43)
其中ε(t)=ϑ(t)-u(t),ηk>0,γ1,k>0,γ2,k>0,0<βk<1是设计参数满足γ1,k>γ2,k/(1-βk),tp,p∈+是触发时刻,当触发规则式(43)被满足则控制器输入为u(tp+1).
基于式(41)~式(43)可得:
ϑ(t)=[1+ζ1(t)βk]u(t)+ζ2(t)γ2,k,
(44)
其中|ζ1(t)|≤1,|ζ2(t)|≤1.
控制器可表示为:
(45)
将控制律式(45)代入式(40)得:
(46)

(47)
结合式(46)、式(47)与引理3可得:
(48)

0.557ηk.
(49)


(50)
注3当切换发生在触发区间[tp,tp+1)时,由于控制器需要在tp+1时刻才进行更新,因此,可能出现控制器模态和系统模态不匹配的情况,进而对系统稳定性产生影响,为了避免这一问题,我们构造了新型的触发机制式(43).
2.3 稳定性分析
令
h=mink∈M{[λmin(Qk)-4-n]/λmax(Pk),
2ci,2li,i=1,...,n},
φ=maxk∈M{δn,k+0.557ηk}.
可得:
(51)
定理1:考虑切换非线性系统(1)满足假设1,在观测器(5),事件控制器(42)及触发机制(43)的作用下,如果平驻留时间满足τa>lnϖ/h,那么可得系统(1)对应闭环系统所有状态半全局一致最终有界.
证明:为系统(1)选取Lyapunov函数为:

Vk[X(t)]≤ϖVs[X(t)],
(52)
其中ϖ>1,k,s∈M.
选择函数H(t)=ehtVσ(t)[X(t)],有:
≤φeht,t∈[tq,tq+1)
(53)
其中[tq,tq+1)表示相邻切换时间间隔.
结合式(52)可得:
H(tq+1)=ehtq+1Vσ(tq+1)[X(tq+1)]
(54)
选择区间q=0→q=Nσ(T,0)-1,得:

≤…
(55)

∀T≥t≥0.
(56)
由Nσ(T,0)-q≤1+Nσ(T,tq+1),q=0,1,…,Nσ(T,0)可得:
ϖNσ(T,0)-j≤ϖ1+N0e(h-l)(T-tq+1),
(57)
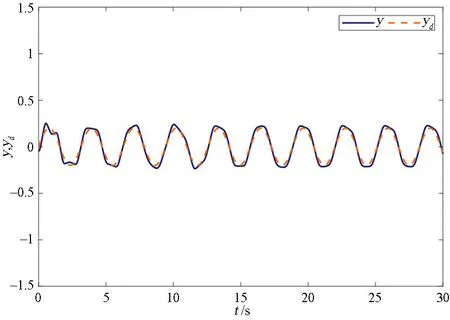
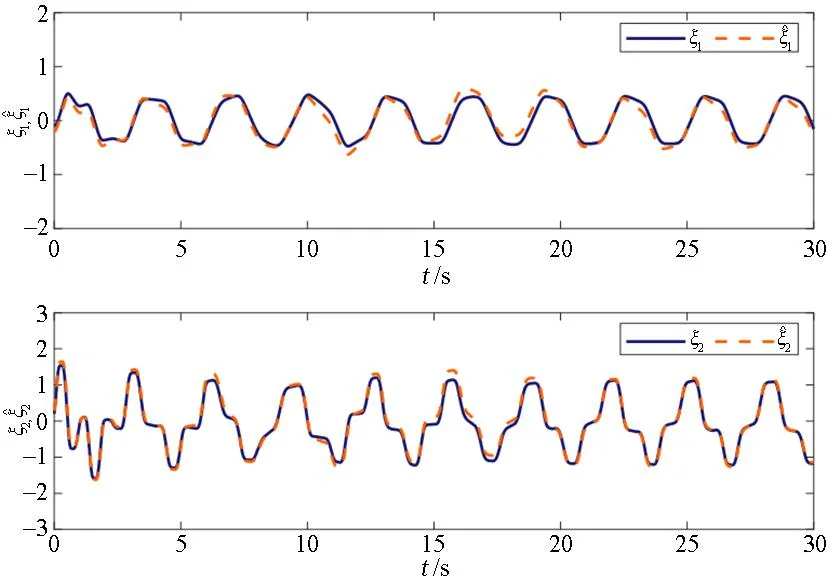
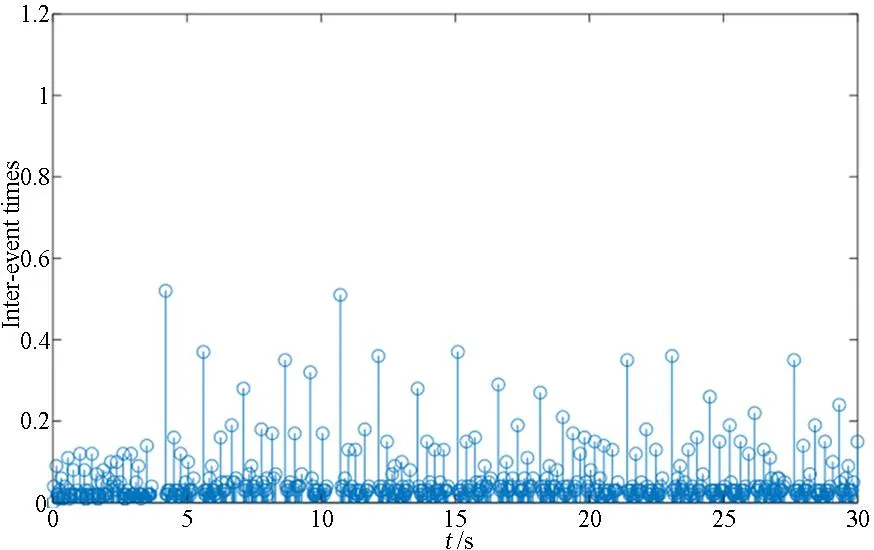
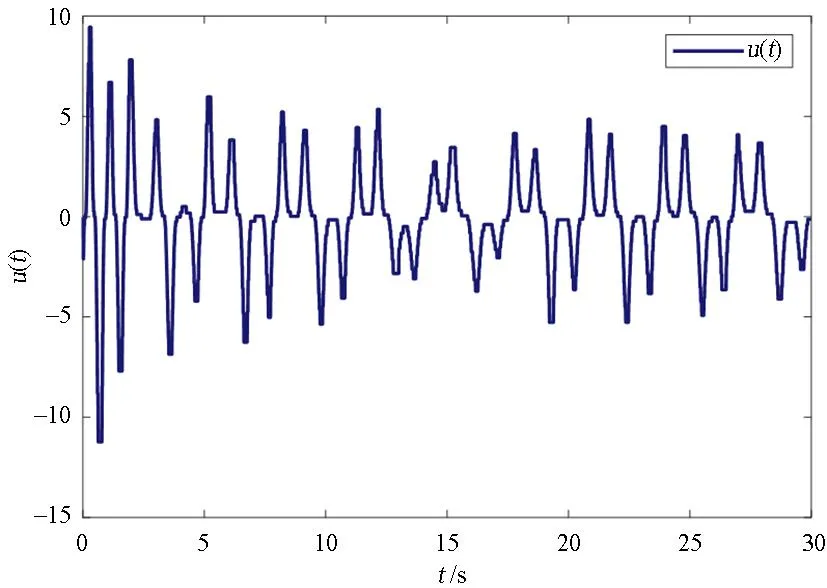
由于l (58) 结合式(57)和(58),式(55)可变为: (59) 进一步有: (60) 为排除Zeno现象,由ε(t)=ϑ(t)-u(t),对于∀t∈[tp,tp+1)有: (61) ≤ψ(tp+1-tp). (62) 在本节中,将通过仿真算例验证所提出方案有效性. 例1 考虑如下切换非线性系统: (63) 本例考虑υ(t)=0.5u(t)+0.8sin(t). 根据式(5)设计状态观测器,根据式(16),(31),(38)和(39)设计虚拟控制律和自适应律,根据式(41)~(43)事件触发控制器.跟踪信号设置为yd=0.2sin2t,针对系统(63),选取初始值及参数如下: 仿真结果如图1~图6所示: 图1 y和yd轨迹Fig.1 Trajectories of y and yd 图1显示系统输出信号和跟踪信号,图2,3显示系统的状态轨迹,切换信号显示在图4,控制信号和事件触发时刻分别显示在图5和图6.从仿真结果可以看出,闭环系统所有状态有界,从而验证本文提出的方案是有效的. 图2 状态ξ1,ξ2和ξ1,ξ2的轨迹Fig.2 Trajectories of ξ1,ξ2 and ξ1,ξ2 图3 系统状态x2的轨迹Fig.3 Trajectory of x2 图4 切换信号σ(t)Fig.4 Switching signal σ(t) 图5 事件触发时刻Fig.5 Event-triggered instants 图6 控制信号uFig.6 Control signal u 本文针对一类具有执行器故障的切换非线性系统,解决了模糊自适应事件触发输出反馈容错控制问题.通过设计状态观测器,估计了不可测量状态.设计了事件触发控制策略能减轻传输负担,最后利用多Lyapunov函数和平均驻留时间方法,证明了所设计的方法使闭环系统所有状态半全局一致最终有界并排除Zeno现象.未来将进一步研究随机切换非线性系统的事件触发控制问题.



3 仿真算例





4 结论
猜你喜欢
测控技术(2018年12期)2018-11-25
制造技术与机床(2017年9期)2017-11-27
黑龙江电力(2017年1期)2017-05-17
环境科技(2016年5期)2016-11-10
自动化学报(2016年8期)2016-04-16
自动化学报(2016年5期)2016-04-16
铁道科学与工程学报(2015年5期)2015-12-24
深空探测学报(2015年3期)2015-12-07
电测与仪表(2015年19期)2015-04-09
系统工程学报(2015年2期)2015-02-28