基于图像取反的同心圆环半径和圆心提取方法
2024-04-03 12:09欧阳烨锋崔建军张宝武方振远
激光技术 2024年1期
欧阳烨锋,崔建军,张宝武*,陈 恺,杨 宁,方振远
(1.中国计量大学 计量测试工程学院,杭州 310018,中国; 2.中国计量科学研究院,北京 100013,中国; 3.陕西省计量科学研究院,西安 710100,中国)
0 引 言
激光干涉检测技术在半导体精密加工、航空航天和国计民生设备检测及计量校准方面非常重要。它是以波长为基准完成被测对象的比较测量,通过各种类型的干涉图像来反映长度、角度、平行度、振动、直线度和平面度,以及透明介质特征参数等被测物理量的信息[1-4]。由于被测对象和测量手段的不同,条纹图形的结构差异非常大。其中同心圆环的干涉图形因其结构对称、圆心干涉级次具有确定值和多圆环信息丰富等优点受到研究者的青睐,它在等倾干涉技术[5]、牛顿环技术[6]、F-P干涉技术[7]和分波面非定域干涉技术[8-10]检测方面处于关键性的地位。为了实现自动化检测,提高测量精度,研究者对同心圆环的条纹定中、圆心和半径的精确提取等方面做了大量工作[11-12]。
本文作者在实验中采用非定域干涉技术进行角度和厚度的测量,为此需要一种良好的、精确度高、信息利用率高的图像处理技术。但是在这方面众多的方法都是仅对亮环加以处理利用,而没有兼顾暗环[13-18],这就丢失了同心圆环干涉图形中暗环所携带的约50%的有用信息。本文中提出了一种基于图像取反的暗亮环兼顾的同心圆环半径和圆心提取方法,可以实现亮环和暗环的同时提取,而又不失提取精度。算法以点光源非定域干涉同心圆环实验图片为对象,首先通过霍夫圆变换自动获取图片的参考圆心,然后在其上下左右每隔5 pixel取一条强度轮廓线,在平滑降噪和图像取反后获得系列条纹中心,利用圆回归拟合的方法精确提取系列半径和圆心,最后,通过系列圆心和半径的平均运算实现图像最终圆心和半径的精确提取。
1 点光源非定域干涉同心圆环
点光源的非定域相干叠加的原理[19]如图1a所示。两个相距为d的点光源S1和S2,它们各自发出的光波分别经过r1和r2路径后在空间P点相遇叠加。具有相同光程差的空间点构成了以S1和S2连线为轴线的双曲面族,如图1b所示。当在Σ3处观察时,将获得同心圆环型的干涉图像,如图1c所示。其中每一个亮环或者暗环的半径记为R。

图1 点光源非定域相干叠加原理Fig.1 Principle of nonlocalized coherent superposition of point light sources
图1c所示的图像在参考圆心(x0,y0)处沿水平x方向和竖直y方向上的强度轮廓线分别如图2a和图2b所示。轮廓线显示,实际采集到的干涉图像通常噪声信号非常大,中心区域的分裂尤为严重,条纹锐度较弱,波峰(对应亮环)和波谷(对应暗环)分裂严重,或者存在饱和现象,极值点难以确定。因此,要从这类图片中精确提取每个圆环的圆心和半径,良好的提取算法非常关键。

图2 实验图像x方向和y方向的强度轮廓线Fig.2 Intensity contours in the x-direction and y-direction of the experimental images
2 算法设计
图2所示的轮廓线中心区域分裂厉害无法定中。传统的处理方式是先对图像进行平滑降噪处理获得中心区域两侧的暗点,然后以这两个暗点为临界点对中心区域进行拟合,获得圆心点;随后以此向外围依次处理,获得每一个亮环的波峰坐标进而完成后续的圆心和半径提取。这样的方式存在如下问题:一是约50%的暗环信息会丢失;二是中心点单独定中准确度不高。依据实验测试要求,为了充分利用亮环和暗环信息,本文作者设计了一种基于图像取反的圆心和半径提取方法,其过程如图3所示。基于图像取反的方案,由外围圆环向中心处理的方式获得圆心和半径,可以在兼顾图片全面信息的同时充分利用多圆环参数进行平均提高精度。图像取反的操作有两个作用:其一可以直接对暗环信息进行提取;其二为靠近中心的第一亮环信息提取提供临界参考点。

图3 处理过程Fig.3 Processing procedure
3 结果分析
图4中给出了图2轮廓线平滑降噪的效果。可以看出,平滑降噪后的曲线除中心区域外,其它波峰和波谷处都实现了单值尖峰结构,同时保持了原曲线的轮廓趋势和峰位位置。

图4 图2轮廓线x方向和y方向上平滑降噪的效果Fig.4 Effect of smoothing and noise reduction on x-direction and y-direction of Fig.2 contour
图5中给出了图4平滑降噪后曲线的取反效果。图形显示,原来的亮环和暗环虽然发生了上下翻转,但是峰位坐标保持不变。为了描述方便,亮环和暗环概念仍表示原始数据的亮环和暗环,而反亮环和反暗环分别表示取反以后的亮环和暗环,即反亮环对应原始数据的暗环,反暗环对应原始数据的亮环。

图5 平滑降噪后曲线x方向和y方向的取反效果Fig.5 Reversal effect of x-direction and y-direction after smoothing and noise reduction

图5中的强度轮廓线显示,靠近中心区域的内部几个圆环强度和间隔都比较理想,因此,只考虑靠近圆心的内部3个亮环和3个暗环即可。通过霍夫原变换自动获取考察图像参考圆心(x0,y0),然后,以参考圆心为基础分别在其x方向和y方向上[-50,50]像素范围内每隔5 pixel取一条强度轮廓线,即每个方向上取21条线,按照图3所示的过程完成每一个圆环的圆心和半径提取,最后,这些亮环圆心坐标和暗环圆心坐标分组分列在表1中。为了更清晰地研究各个圆环对应圆心的波动情况,分别求出亮环和暗环各自总的圆心坐标平均值,然后以此为基准求出各个圆环所对应圆心坐标的差值,按照图1c所示的亮暗顺序排列后如图6所示。由表1和图6可知,3个亮环和3个暗环各自的圆心坐标非常接近,相对于总平均值的最大偏差为-3.7 pixel,即相对于平均值的最大相对偏差为-0.15%,重复性很好,这表明本文中的平滑降噪和取反方法具有良好的可行性。

表1 图1c内部3个亮环和3个暗环的回归半径和圆心坐标Table 1 Regression radius and circle center coordinates of three inner bright rings and three dark rings of Fig.1c
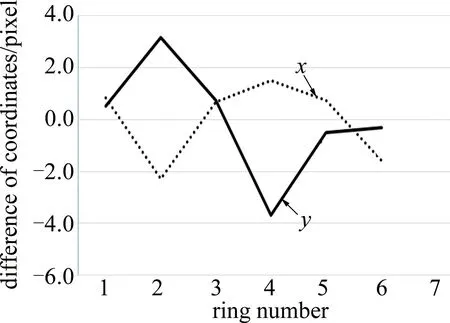
图6 圆心坐标波动曲线Fig.6 Circular center coordinate fluctuation curve
研究显示,非定域干涉同心圆环中每一环的半径R与其离开中心点的序数N之间存在如下式所示的关系[20]:
RN2=αN
(1)
式中:α为常数系数。由此可知,相邻两个圆环半径平方比值与对应序数之比成正比。将表2中的半径值R都按照图1c所示的明暗位置排列,首先确定相邻圆环序数之比Rr(后一个圆环比前一个圆环),然后对半径的平方取比值Rs(后一个圆环比前一个圆环),最后取半径平方比值与序数比值的相对误差E,如表2所示。比较结果显示,圆回归拟合后圆环半径的准确性很好,相对误差在-4.18%~0.36%之间。

表2 相邻圆环之间半径平方比值的关系Table 2 Relationship between the radius square ratios of adjacent rings
4 结 论
提出了一种基于图像取反兼顾暗环和亮环信息的同心圆环干涉图像圆心和半径提取方法,平滑降噪过程使强度曲线除中心区域外,其它亮环和暗环处都实现了单值尖峰结构,同时保持了原曲线的轮廓趋势和峰位位置。图像取反过程可同时获取暗环和亮环的信息,提高了图像信息利用率,多圆环参数平均过程提高了提取精度。结果表明,靠近中心3个亮环和3个暗环各自的圆心坐标非常接近,相对总平均值的最大偏差为-3.7 pixel,重复性很好;相邻两个圆环半径平方比值相对于实际比值的误差在-4.18%~0.36%之间变化,初步达到了检测要求。
猜你喜欢
福建中学数学(2023年5期)2024-01-25
黄河之声(2022年1期)2022-03-16
黄河之声(2021年21期)2021-03-22
华人时刊(2020年19期)2020-11-17
启蒙(3-7岁)(2020年7期)2020-07-08
中国教育信息化(2019年22期)2019-12-20
中等数学(2018年1期)2018-08-01
计算机工程与科学(2015年1期)2015-03-27
华东师范大学学报(自然科学版)(2014年4期)2014-03-11
数学大世界·初中生辅导版(2010年2期)2010-03-08