基于虚幻引擎的红外成像激光对抗模拟系统
2024-04-03 12:09何衡湘贾荣华李玲慧
激光技术 2024年1期
钟 强,何衡湘,唐 钰,贾荣华,李玲慧
(西南技术物理研究所,成都 610041,中国)
0 引 言
红外成像由于其全天候工作特性,广泛应用于光电侦察与精确制导领域[1-2]。随着激光技术的发展,激光定向压制干扰逐渐成为红外成像系统的主要对抗手段[3]。红外成像探测器在受到激光干扰时,会在图像中形成形状各异的高亮度光斑,使得成像系统无法正常识别与捕获目标。在模拟其激光干扰效果时,通常可采用数字仿真的方法[4-8]。目前的仿真大多基于干扰功率的调整,只能得到激光干扰光斑的面积大小对比,未加入场景模拟,无法映射光斑面积与干扰距离、成像视场等的关系。在红外场景仿真方面,主要是以视景仿真软件为主,开展目标与场景的红外成像模拟[9-12],其视景范围较小,且在场景渲染效果上不够真实。
虚幻引擎最早作为游戏开发引擎而面世,是一款高效、全能的实时渲染引擎,独有的蓝图可视化脚本系统能极大地提高开发效率,加上其强大的模型与场景编辑、渲染功能,可用于红外成像干扰方面的仿真与模拟。本文作者利用虚幻引擎构建红外成像激光对抗模拟系统,将激光干扰效果可视化、场景化,实现高逼真度的红外成像激光对抗模拟。
1 红外成像模拟
1.1 场景设置
在虚幻引擎中导入场景、激光干扰源及红外成像系统的模型,利用虚幻引擎的地形编辑功能,构建出对抗场景。虚幻引擎默认场景单位为cm,本系统场景尺寸大小600000 cm×600000 cm。虚幻引擎默认坐标轴系为(x,y,z),为绝对坐标系。x轴正方向为前方,围绕x轴旋转为滚动;y轴正方向为右方,围绕y轴旋转为俯仰;z轴正方向为上方,围绕z轴旋转为偏转,下同。将场景位置坐标设置为(0 cm,0 cm,0 cm),此时场景边缘在x方向、y方向最小值为-300000 cm,最大值为300000 cm。场景整体选取为山区,有较少植被覆盖。由于地形高低起伏不规则,且有低洼处,场景设置位置坐标后在z方向最小值为-3800 cm,最大值为24070 cm。场景中绘制弯曲环绕的公路,公路纹理材质设置为柏油路。干扰源模型为轮式车辆,静止放置于坐标点(19872 cm,17078 cm,2454 cm),天气设定为无云且有较强光照,最终得到场景效果图见图1。

图1 场景效果图Fig.1 Rendering of the scene
1.2 红外成像模拟
自然界任一温度高于绝对零度的物体时刻都在向外界辐射热能,且辐射能的强弱与物体的表面材料属性以及温度都有直接的关系[13]。在红外成像场景中,不同物体或同一物体的不同部位所表现出的红外特征都存在差异[14]。在虚幻引擎中,通过设置冷热成像的底色与表色,利用场景深度与物体的自定义深度进行比较,实现物体与场景的红外成像。可以通过以下步骤实现红外成像的模拟:(a)创建红外成像材质、材质实例以及红外成像用户界面,将红外成像材质实例拖入到红外成像用户界面中;(b)添加控件组件,将其选择为创建好的红外成像用户界面;(c)创建红外成像渲染材质,将材质域设置为“后期处理”,编辑红外成像渲染材质蓝图,创建红外成像渲染材质实例,红外成像渲染材质实现原理见图2;(d)红外成像系统蓝图中添加“场景捕获组件2D”,将纹理目标设置为成像纹理,后期处理材质中添加热成像渲染实例。

图2 红外成像渲染材质实现原理Fig.2 Implementation principle of infrared imaging rendering materials
接下来设置干扰源及红外成像系统参数。设定红外成像系统视场为8°,分辨率为640×480,在场景中的初始位置为(50052 cm,-37695 cm,34193 cm)。调节红外成像系统指向信息为(2.88°,-25.85°,119.2°),虚幻引擎默认指向轴系为(滚动,俯仰,偏转),下同。干扰源位置不变,坐标保持(19872 cm,17078 cm,2454 cm),将其轮胎及发动机舱等部位模型的自定义深度通道勾选,模拟热成像,运行系统,得到红外成像效果图,如图3所示。

图3 红外成像效果图Fig.3 Rendering of infrared imaging
2 激光干扰模型构建
激光对红外成像系统干扰的机理实质上是利用激光能量来辐照红外成像系统的探测器,在图像上形成形状各异的饱和亮斑[15]。亮斑的大小与到达探测器靶面的激光功率密度以及探测器单像元饱和时的激光功率密度有关[16-17]。激光传输示意图如图4所示。
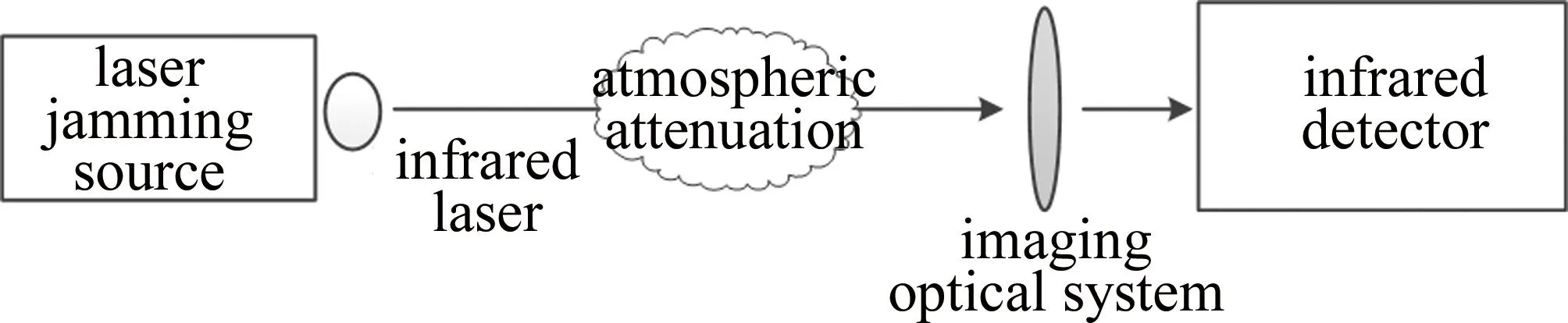
图4 激光传输示意图Fig.4 Laser transmission diagram
根据干扰激光的发射功率P和束散角Θ,可计算出激光到达被干扰目标探测器靶面的功率密度ρ(W/cm2):

(1)
式中:ρ为功率宽度(W/cm2);P为干扰激光功率(W);τ1为红外成像光学系统的透过率;τ2为干扰激光单程传输的大气透过率;θ为激光光轴对红外成像系统的瞄准角(°);L为干扰距离(m);Θ为激光束散角(mrad);D为红外成像光学系统通光口径;d为激光在探测器上的弥散斑;D2/d2为光学系统的增益。
激光单程传输的大气透过率,计算方法[18]见下:
τ2=exp(-β×L)
(2)
β=(3.91/V)(0.55/λ)p
(3)
式中:β为大气衰减系数;L为干扰距离(km);V为能见度(km);λ为干扰激光波长(μm);p是与V有关的经验常数,V<6 km时,p=0.585V1/3;V≥6 km时,p=1.3。
激光光斑饱和区域半径r与到探测器靶面功率密度的关系[19]见下:

(4)
式中:ρ0为单像元饱和时的激光功率密度阈值。
3 激光对抗模拟
通过激光干扰模型模拟生成激光光斑。激光光斑在虚幻引擎中实质是粒子系统,其辐射区域大小由接收到的幅值信息即激光光斑饱和区域半径决定。激光对抗模拟时,干扰源始终保持静止状态,其坐标位置不变,为(19872 cm,17078 cm,2454 cm)。调整红外成像系统的位置、视场角及指向信息,完成不同距离、不同视场以及干扰激光不同入射角度的激光对抗模拟。模拟时干扰源激光发射功率、束散角均保持不变。
3.1 不同距离的对抗模拟
红外成像系统设置视场角为8°,持续向干扰源逼近,干扰源保持在视场中心位置附近。取逼近过程中的红外成像系统3个位置坐标,干扰源向目标发射激光,将不同距离下干扰前后成像效果进行对比分析,效果图见图5。

图5 不同距离下激光对抗模拟Fig.5 Laser countermeasure simulation at different distances
模拟结果表明,随着干扰距离的减小,到达探测器表面的激光功率密度增加,激光光斑饱和区域半径相应增大,即干扰光斑的面积变大。
3.2 不同视场的对抗模拟
将红外成像系统位置调整为(-52310 cm,189867 cm,279673 cm),指向信息调整为(3.27°,-56.0°,-66.8°),视场角设置为8°、6°和4°,干扰源保持在视场中心位置附近。干扰源向目标发射激光,将不同视场条件下干扰前后成像效果进行对比分析,效果图见图6。

图6 不同视场下激光对抗模拟Fig.6 Laser countermeasure simulation in different fields of view
模拟结果表明,随着视场角的缩小,红外成像系统的光学增益随之增大,到达探测器表面的激光功率密度增加,激光光斑饱和区域半径r相应增大,即干扰光斑的面积变大。
3.3 不同入射角度的对抗模拟
将红外成像系统位置调整为(-50042 cm,205575 cm,229543 cm),视场角设置为8°,调整红外成像系统指向信息,将干扰源成像在视场中心、右上角及左侧中部位置。干扰源向目标发射激光,将干扰前后成像效果进行对比分析,效果图见图7。

图7 不同入射角度下激光对抗模拟Fig.7 Laser countermeasure simulation at different laser incident angles
模拟结果表明,在干扰距离及视场角不变的情况下,调整红外成像系统指向,干扰源出现在红外成像系统视场的不同位置,此时激光入射角度在±4°范围内变化,但这几乎不影响到达探测器表面的功率密度,干扰光斑面积也几乎没有变化,这一现象符合干扰光斑的空间平移不变性[20]。
4 结 论
以虚幻引擎作为开发工具,完成红外成像激光对抗的干扰效果模拟。本系统作为光电对抗仿真模拟基础平台,集成了大气透过率模型,当增加对抗目标的红外辐射特性后,可用于光电对抗装备对红外目标的探测与跟踪仿真,系统可扩展性较强,为光电对抗虚拟仿真研究提供了新的途径。
下一步可将红外制导模型加入到系统中,构成一个集探测、识别、捕获、对抗以及评估为一体的全闭环动态对抗模拟系统,具有较广阔的应用前景。
猜你喜欢
滇池(2022年7期)2022-06-29
天津诗人(2022年2期)2022-02-25
中国光学(2021年6期)2021-11-25
中国医疗设备(2019年1期)2019-01-15
小学科学(学生版)(2018年7期)2018-08-13
电子制作(2017年10期)2017-04-18
发明与创新(2016年26期)2016-08-22
电信科学(2016年9期)2016-06-15
中国交通信息化(2016年5期)2016-06-06
现代工业经济和信息化(2016年8期)2016-05-17