
市区驾驶人横向避险特性研究*
2024-04-05 05:45贾丙硕雷嘉豪程吉鹏
小型内燃机与车辆技术 2024年1期
贾丙硕 雷嘉豪 程吉鹏
(陕西工业职业技术学院 陕西 咸阳 712000)
引言
由于市区道路环境是机动车与非机动车混行的道路环境,且为复杂多变的行车环境,发生交通事故的概率高于其他类型的道路环境[1]。另外,在市区道路环境下,横向危险应激物的出现几率更大,且更易使驾驶人出现驾驶操作失误,从而造成交通事故。因此,对驾驶人在横向危险出现时驾驶行为的特性进行研究和分析,可为探求减少因驾驶人原因而引发的交通事故和从驾驶人方面提高道路安全性和可靠性提供理论基础[2]。
驾驶人的紧急避险反应与市区道路环境下交通事故的发生与否存在较大的联系。国内外对于驾驶人的紧急避险特性开展了一系列研究。危险感知方面,2010 年,David Crundall 及其团队设计了9 个驾驶应激场景,利用Faros GB3 Simulator 驾驶模拟器对被试者进行口头提示潜在危险场景的测试,进一步验证了对驾驶人进行口头提示危险训练可以增强其危险感知能力[3]。决策方面,钱宇彬等[4]对驾驶人的应激反应能力训练进行了研究,利用汽车模拟试验装置记录驾驶人在应激状态下的生理反应和操作反应。研究结果表明,对驾驶人进行适当的训练,可以提高他们在紧急情况下的处理能力;于鹏程等[5]通过建立判断时间预测模型,得出驾驶人判断时间与车速之间存在较强的相关性。此外,随着驾驶人专业训练次数的增加,驾驶人反应能力以及正确操作率都能得到提高,紧急避险能力可以得到有效提高。
综上所述,对驾驶人在紧急避险过程中感知、判断、决策、动作等方面进行研究,可以掌握驾驶人的感知-操作时间、避险常用操作等。
鉴于市区道路行车环境复杂多变,错误的避险操作容易引发交通事故,本文建立了6 个典型市区行车危险场景,采集不同驾驶人的横向避险数据并进行研究,得到危险场景下的驾驶人避险特性,探求解决城市交通事故频发的有效途径,从驾驶人方面提出提高行车安全性和可靠性的措施。
1 试验设计
1.1 试验仪器与被试者选取
本试验采用Silab 4.0 驾驶模拟器搭配Facelab 5.0 非接触式眼动仪对被试者进行数据采集,Facelab 5.0 非接触式眼动仪用于追踪驾驶人的眼睛及头部运动,可以精确测量驾驶人注视行为、扫视行为、头部位置、头部转动角度等参数[6]。
试验共招募20 名被试者,平均年龄为24.5 岁(标准差SD=1.53),平均驾龄为1.5 年(SD=1.37)。所有被试者精神状态良好,试验前精力充沛,双眼视力(含矫正视力)在5.0 左右,可独立规范驾驶车辆。
1.2 试验场景设计
考虑到真实的城市道路环境中存在机动车与非机动车混行等多种复杂的道路状况,依据典型性、多样性和全面性原则,选取6 个可测试驾驶人紧急避险特性的典型市区行车危险场景,见表1。为使驾驶人完全沉浸在仿真驾驶道路中,每段危险场景出现前,驾驶人都会行驶一段平稳无危险的道路。
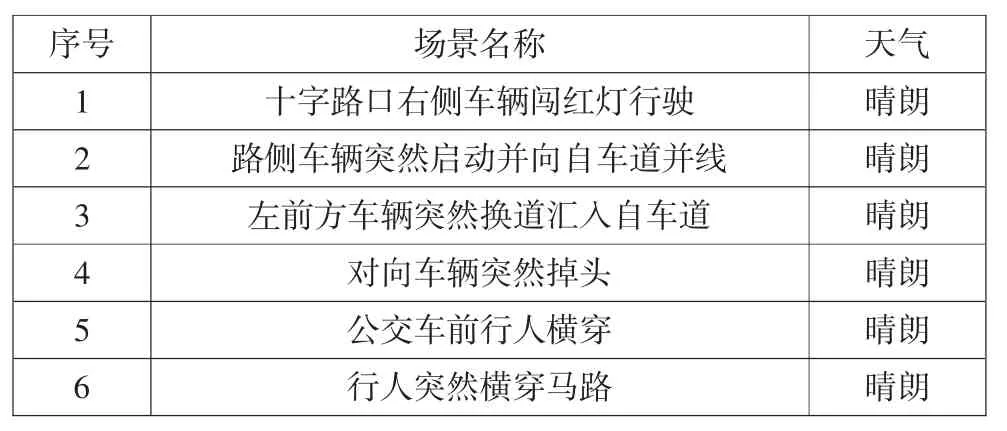
表1 典型市区行车危险场景
场景1:自车行驶经过一段平稳路段,进入亮起绿灯的十字路口,在距离危险车辆50 m 时,右侧横向车道内车辆突然闯红灯并以75 km/h 的速度经过交叉路口,两车存在明显冲突,驾驶人需采取避险操作。
场景2:当自车行驶到距离路侧停放的危险车辆30 m 时,激活该危险车,该危险车开始运行并以10 m/s2的加速度加速到50 km/h。在整个加速过程中,危险车同时向自车道并线汇入。此时,驾驶人应该及时感知到该车的潜在危险及干扰,采取相应的避险操作。
场景3:自车在一段直路上正常行驶,当行驶到距离左前方特定危险车20 m 时,该危险车突然向右换道并线汇入自车道。这种情况要求驾驶人及时察觉周围车辆动向,遇到突发情况及时做出调整,避免交通事故发生。
场景4:当自车经过一段平稳路段并行驶到距离对向危险车辆165 m 时,激活对向危险车辆,危险车辆向前行驶到距离自车25 m 时,突然以33 km/h 的速度掉头,然后汇入自车道。驾驶人要及时察觉到左侧掉头车辆并迅速做出避让,避免发生交通事故。
场景5:公交车停靠在站台,行人被公交车遮挡,当自车以75 km/h 的速度行驶到距离行人40 m 时,行人从距离当前行驶车道中心线7.5 m 处以3.5 m/s的速度横穿马路。
场景6:在夜晚的城市道路环境下,驾驶人驾驶车辆正常行驶一段距离,在即将进入十字路口、且自车与危险目标行人相距45 m 时,目标行人从距离自车道中心线7.5 m 处以3.5 m/s 的速度突然横穿马路,与自车造成冲突。
1.3 数据采集与处理
试验开始前,对试验仪器进行调试和校正,打开Facelab 5.0 和Silab 4.0,确定程序可以正确运行,保证后续试验顺利进行。所有试验所需的被试者信息采集完毕后,打开非试验场景,请被试者分别驾车行驶两段非试验场景道路,熟悉驾驶模拟器的使用方法。待被试者完全掌握驾驶模拟器的使用方法后,打开建立好的典型市区行车危险场景,要求被试者以75 km/h 的车速靠右侧车道行驶,遇到紧急情况时进行相应避险操作。试验过程中,利用Facelab5.0 和Silab4.0 实时采集被试者眼动和操作数据,进而分析驾驶人视线分布与避险操作特性。
2 眼动数据分析
2.1 总体视线分布
试验过程所模拟的典型市区行车危险场景整体存在一定的相似性,通过整理数据发现,驾驶人的视线分布存在一定的差异性。场景1 和场景2 中,驾驶人需要应对右侧冲突并进行避险操作;场景3 和场景4 中,驾驶人需要应对左侧冲突并进行避险操作;场景5 和场景6 都是行人快速穿越马路,区别在于是否存在遮挡物。由于每个场景中危险目标的位置、速度均会有所不同,所以驾驶人视线分布会存在一定差异。
场景1、场景2 驾驶人视线分布如图1 所示。图中,横坐标上的正数代表右视角,负数代表左视角;纵坐标上的正数代表上视角,负数代表下视角。
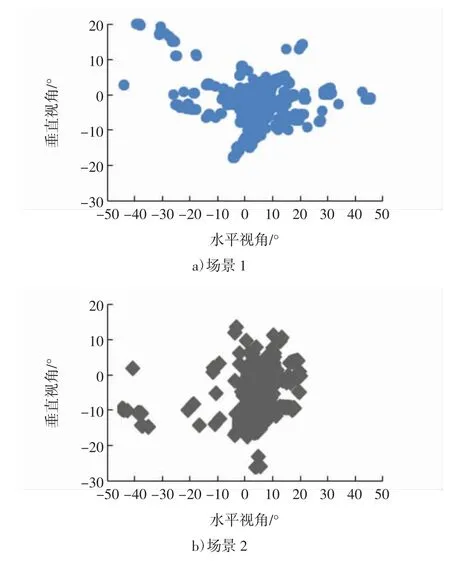
图1 场景1、场景2 驾驶人视线分布
由图1 可知:场景1 和场景2,驾驶人水平视线均集中在[0°,10°],垂直视线均集中在[-15°,5°]。这主要是因为,当路边停靠车辆或右侧横向闯红灯车辆进入驾驶人视野时,基本处于视野右前方。相较于场景2,场景1 的驾驶人水平视角分布更为分散。这是由于闯红灯车辆危险性更大,驾驶人会时刻关注其运行状态。
场景3、场景4 驾驶人视线分布如图2 所示。图中,横坐标上的正数代表右视角,负数代表左视角;纵坐标上的正数代表上视角,负数代表下视角。

图2 场景3、场景4 驾驶人视线分布
由图2 可知,场景3 和场景4,驾驶人水平视线均集中在[-10°,10°],垂直视线均集中在[-15°,10°]。这主要是因为,无论是左前方车辆变道汇入自车道,还是对向车辆调头行驶,危险车辆主要集中在左前方,故驾驶人注视点整体偏左。相较于场景4,场景3的驾驶人水平注视点整体偏右。由此可见,当驾驶人遇到对向车辆调头行驶时,更能引起注意,其水平注视点整体分布更分散且偏向左前方。
场景5、场景6 驾驶人视线分布如图3 所示。图中,横坐标上的正数代表右视角,负数代表左视角;纵坐标上的正数代表上视角,负数代表下视角。
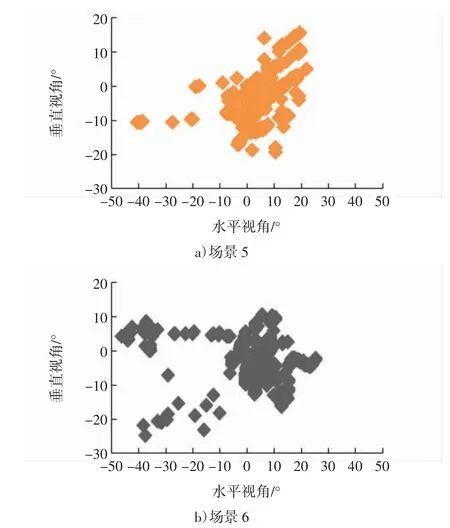
图3 场景5、场景6 驾驶人视线分布
场景5 和场景6 均为行人横穿马路,区别在于是否存在遮挡物。由图3 可知,驾驶人垂直视线分布基本保持在[-15°,10°]。但是场景5 的驾驶人水平视线集中在[-5°,15°],场景6 的驾驶人水平视线集中在[-10°,15°]且整体存在较大的追随运动,水平视角最大可达45°。这是由于在场景5 中,由于公交车遮挡视线,当行人突然出现时,避险操作更加紧急,所以驾驶人更多的是注视遮挡物前情况;而在场景6中,行人横穿马路,由于视野开阔且行人运动随机性原因,驾驶人会出现视线追随现象。
综合分析图1、图2、图3 所示的6 个典型市区行车危险场景中驾驶人视线分布散点可以明显发现:典型市区行车危险场景中,驾驶人的注视点分布特点为水平方向上主要集中在[-5°,10°],垂直方向上主要集中在[-20°,10°]。这是由于在本试验中,驾驶人一般处在右侧车道行车,在平稳驾驶过程中,驾驶人的视线注视点一般在中央位置,当应激事件出现时,驾驶人的注视点相应地随着应激物出现漂移,以此来准备调整驾驶状态随时避险。
2.2 水平视角分析
驾驶人在市区道路行车,遭遇横向危险时,水平视角能很好地反映驾驶人视线以及危险认知情况。
对上述6 个典型市区行车危险场景中驾驶人的水平视角进行分析,得到驾驶人水平视角统计见表2。
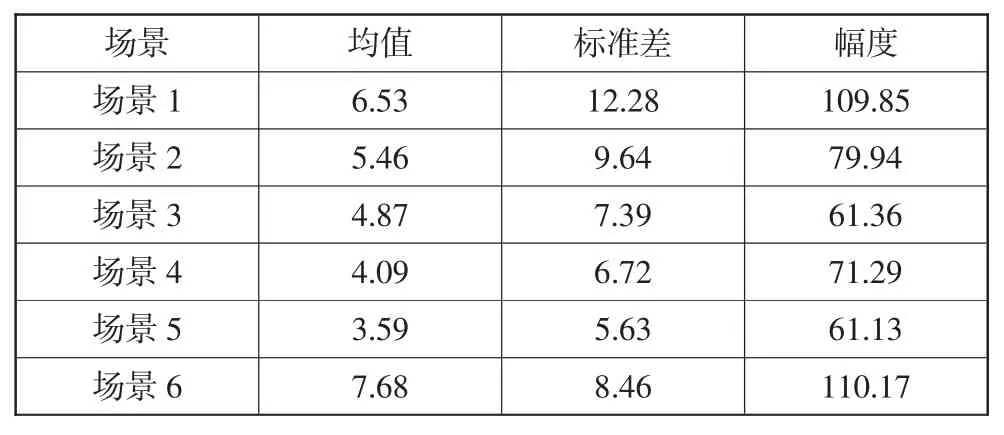
表2 驾驶人水平视角统计表 °
由表2 可以看出,6 个场景中,驾驶人的水平视角基本上保持在[0°,10°],即驾驶人大部分时间视线都停留在右前方。
在场景1 和场景2 中,相较于场景2,场景1 的驾驶人水平视角幅度更大。这是由于十字路口视野开阔,驾驶人能够及早发现横向车辆。
在场景3 和场景4 中,相较于场景3,场景4 的驾驶人水平视角均值偏小,即相较于左前方车辆变道汇入自车道,对向车调头行驶更能引起驾驶人注意,故大多数驾驶人注视点在调头车辆上,这与上述分析能够很好地相互印证。
在场景5 和场景6 中,场景5 由于驾驶人视线受到遮挡物影响,因此驾驶人水平视角的均值、标准差、幅度均较小。场景6 由于横穿马路的行人运动随机性大,驾驶人水平视角幅度较大,扫视范围更宽。
3 驾驶行为分析
3.1 感知-制动时间
从驾驶人发现危险目标到采取制动措施的过程即驾驶人感知-制动时间[7],可以通过逐帧分析驾驶人眼动视频的方法来确定避险过程中感知时刻。6 个典型市区行车危险场景中驾驶人感知-制动时间的统计结果见表3。

表3 驾驶人感知-制动时间统计表 ms
由表3 可知,6 个典型市区行车危险场景中,驾驶人的感知-制动时间不具备很强的统一性,但是大多数场景中,驾驶人的感知-制动时间均值在1 000 ms 以内。由此说明,大多数驾驶人在遭遇突发危险时均能快速做出避险反应。具体来说,在场景3 中,驾驶人的感知-制动时间标准差最小,说明所有驾驶人在遇到左前方车辆突然换道汇入自车道时反应迅速且高度一致;在场景6 中,驾驶人的感知-制动时间极大值与极小值差异最大,且均值与标准差均最大,说明在场景6 中驾驶人反应差异性最大。
3.2 持续制动时间
感知-制动时间过后,驾驶人如果不能成功避险,接下来就只能选择踩制动踏板[8],使车辆速度降低进而避免险情。一般情况下,当驾驶人松开制动踏板后,可以认为避险结束[9]。对驾驶人避险过程中持续制动时间进行统计,可帮助分析避险特性。6 个典型市区行车危险场景中驾驶人持续制动时间的统计结果见表4。

表4 驾驶人持续制动时间统计表 ms
由表4 可以看出:
在场景1、场景2 中,驾驶人持续制动时间的均值和标准差整体较小,说明大部分驾驶人对危险的判断基本一致并通过短暂的制动措施就可完成避险。
在场景5、场景6 中,驾驶人持续制动时间的均值与标准差均较大,说明在此2 个场景中,驾驶人的制动持续时间普遍较长,且各驾驶人的制动持续时间波动较大。当行人突然冲出时,部分驾驶员来不及做出正确的驾驶应激反应,易发生交通事故。
3.3 最大方向盘转角时间
在应激避险过程中,有的场景可以通过紧急制动成功避险,但在一些包含侧面碰撞的场景中,往往需要驾驶人采用转向或制动转向相结合的避险方式来避险[10]。在紧急转向过程中,驾驶人通过快速转动方向盘使车辆改变原来的行进方向进而达到避险的目的。从危险出现到车辆方向盘转角到达最大值可以认为是避险操作[11],不同场景中驾驶人最大方向盘转角时间统计见表5。
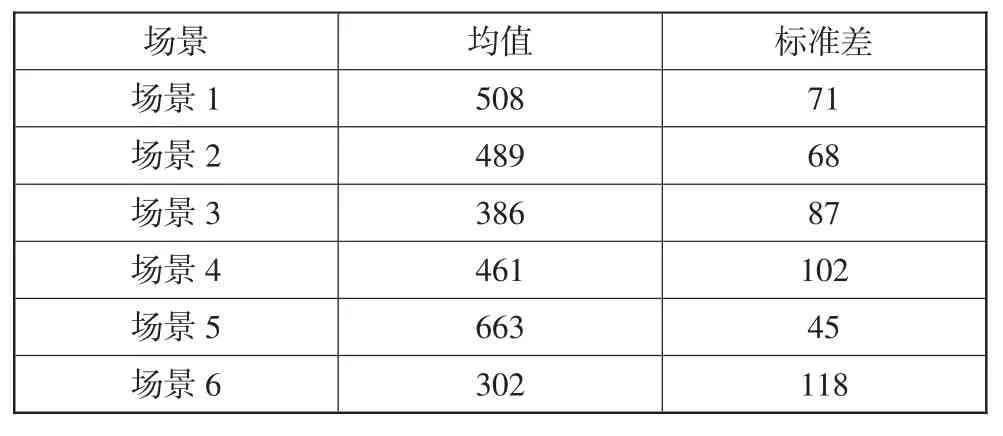
表5 驾驶人最大方向盘转角时间统计表 ms
从表5 可以看出,在6 个场景中,场景5 的驾驶人最大方向盘转角时间均值最大,标准差最小。说明在市区道路行车存在视线遮挡的情况下,当有行人突然冲出时,驾驶人避险操作更为紧急;在场景6中,同样是行人横穿马路,由于驾驶人视野没有遮挡,大部分驾驶人能够提前观察到危险并进行避险操作,只需要轻微转动方向盘或采取制动措施就可以避险,故最大方向盘转角时间均值较小;在场景2中,由于路侧车辆突然启动并向自车道并线,驾驶人最大方向盘转角时间普遍偏长。这是由于路侧车辆运行过程中的随机性问题,大部分驾驶人通过转动方向盘调整自车位置来达到避险目的。
3.4 车辆横向位置
以车道中线为中心,自车向左偏为负值,自车向右偏则为正值[12]。6 个典型市区行车危险场景中,所有被试车辆行车过程中的横向位置变化值统计见表6。
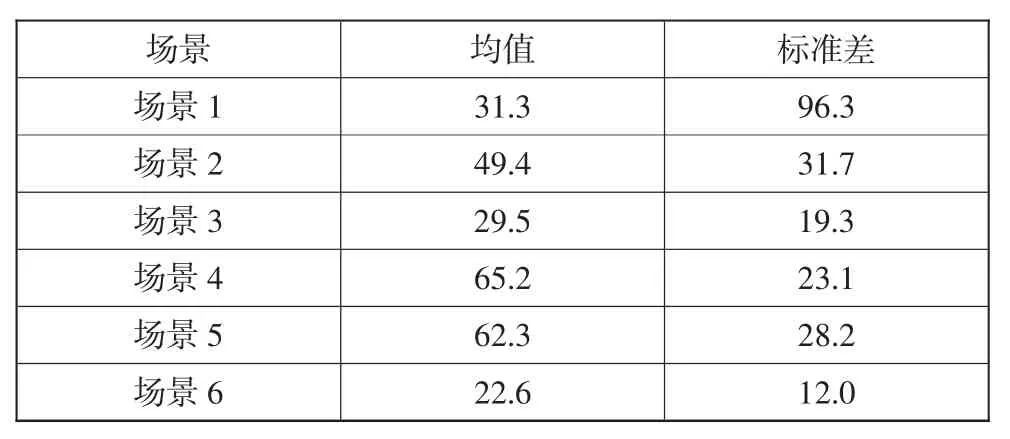
表6 自车横向位置变化值 cm
从表6 可以看出,在对向车突然掉头的场景4中,自车的横向位置偏右最明显,说明大部分驾驶人调整自车方向来避险;在行人突然横穿马路的场景6中,自车的横向位置变化幅度为6 个场景中最小,说明在没有任何遮挡物的情况下,大部分驾驶人能够提前判断出危险并进行制动避险操作;在十字路口右侧车辆闯红灯行驶的场景1 中,驾驶人的横向位置移动有较大的差异性。总体上,在6 个场景中,自车的横向位置始终偏右。
4 结论
本文在总结国内外有关城市道路驾驶人应激能力研究成果的基础上,通过设计典型市区行车危险场景,采用驾驶模拟器对市区道路驾驶人横向避险特性进行了研究,结果发现:
1)6 个典型市区行车危险场景中,驾驶人的视线范围最集中的地方是中部视野区域。表明在城市道路上行车过程中,由于复杂多变的道路环境及诸多需要注意的道路信息,驾驶人注意力基本都在车辆前方。
2)所有的典型市区行车危险场景中,当危险出现时,驾驶人均能够迅速做出反应,感知-制动时间均值大多在1 s 之内。
3)市区道路行车,当驾驶人视线存在遮挡时,避险操作更为紧急;相反,当驾驶人视线良好时,大部分驾驶人能够及时发现危险并采取制动避险措施。
4)由于本文研究的典型市区行车场景均为虚拟场景,且试验设备为驾驶模拟器,故驾驶人避险操作可能与真实行车环境存在一定差异性,后续可以考虑进行封闭试验场中的实车试验来对比结果差异性。
猜你喜欢
特区文学·诗(2021年6期)2021-12-22
共产党员(辽宁)(2019年7期)2019-11-18
共产党员·上(2019年4期)2019-04-26
幼儿画刊(2018年10期)2018-10-27
金色少年(奇趣科普)(2017年11期)2017-11-28
环球时报(2017-08-18)2017-08-18
中外玩具制造(2016年5期)2016-11-06
奥秘(2016年3期)2016-03-23
当代贵州(2015年19期)2015-06-13
新疆农垦科技(2014年9期)2014-02-28
