基于线性自抗扰控制的纵向舰载机直接升力全自动着舰控制
2024-04-09 01:41吴启龙朱齐丹
智能系统学报 2024年1期
吴启龙,朱齐丹
(哈尔滨工程大学 智能科学与工程学院, 黑龙江 哈尔滨 150001)
舰载机的着舰控制是飞行控制系统的一个重要研究内容,目的是提高着舰精度[1]。传统的舰载机采用油门控制下滑,俯仰杆控制迎角的控制方法。这种方法有很多缺点,如操纵通道的耦合,轨迹和姿态的耦合,以及着舰精度差等,因此提出了直接升力控制(direct lift control,DLC)用于舰载机着舰[2-3]。这种技术直接控制作用在飞机上的力,从而消除了轨迹和姿态运动的耦合。但是由于舰载机的最终着舰过程会受到强烈的舰尾流干扰,即使在DLC下,这些干扰也会大大影响着舰精度。如何使舰载机在干扰作用下快速准确地跟踪理想的下滑轨迹,是全自动着舰系统的关键问题。为了使直接升力控制自动着舰系统具有更好的抗干扰能力,需要引入先进的控制律来实现姿态稳定和理想下滑道跟踪。
对于DLC着舰控制系统的设计,许多专家设计了不同的方案。精密进近与着舰的增强引导综合控制技术就是利用DLC来提高舰载机下滑道跟踪性能。在飞机上的验证表明,舰载机着陆偏差被有效降低[4]。但是此设计的航母着陆系统仍然是一个人工控制系统,由飞行员发出引导指令。由于DLC系统的姿态和轨迹解耦性较差,因此设计了一种模糊动态逆控制器[5],可以实现DLC,具有良好的鲁棒性,在动态响应方面优于常规动态逆控制器。然而,动态逆DLC着舰系统在很大程度上依赖于准确的飞机模型,当飞机模型数据不准确时,动态逆向控制器的性能会急剧下降。在文献[6]中,这种设计方法虽然可以保证DLC模式的实现,但在实现中需要根据不同的飞行状态求解合适的增益参数,因此很难实现飞行轨迹与姿态的真正解耦。H无穷控制策略被应用于飞行控制系统的设计,提高了系统的鲁棒性能[7-8]。然而,这种方法在处理高增益系统和设计高阶控制器时过于复杂。文献[9-10]将自适应模糊控制方法应用到飞行控制中,与传统控制方案相比,它提高了着舰精度。此方法解决了舰载机着舰模型中的强时变性、参数不确定性、复杂环境干扰等问题。然而,当模型发生重大变化时,自适应控制器的参数往往不能及时调整。因此,自抗扰控制(active disturbance rejection control,ADRC)得到了越来越多的关注。
ADRC已被成功地应用于许多领域。许多学者都给出了不同的设计方案,如非线性飞机模型姿态控制[11]、电力驱动速度控制[12]、解决高超音速飞行器控制系统中的耦合和干扰问题[13]以及无人驾驶飞机的可视化着陆系统[14]。然而,ADRC包含非线性函数和许多可调参数,这使得参数调整更加复杂。因此,文献[15]引入带宽的概念,将非线性ADRC转化为由线性扩张状态观测器(linear extended state observer,LESO)和比例-微分控制器(proportional-derivative controller,PD)组成的LADRC。LADRC大大简化了参数的设置,使得LADRC技术在各个领域得到了更广泛的应用。文献[16]为四旋翼无人机设计了一种滑模控制和LADRC相结合的控制方法,以解决在有干扰的情况下,无人机对参考信号的稳定跟踪。文献[17]介绍了一种自适应LADRC控制器,以实现强大的抗干扰性能并降低机电执行器的噪声敏感性。虽然LADRC具有上述优点,但当舰载机受到外部干扰和LESO估计误差的影响时,一组固定的反馈率参数使得控制效率不尽人意。径向基函数神经网络(radial basis function neural network, RBFNN)由于具有学习和自适应能力,可以有效控制复杂的不确定系统[18-20]。为了简化参数调整过程,增强控制器的抗干扰能力,使自动着舰控制系统在外界干扰下能快速稳定地沿理想下滑道飞行。本文提出了一种利用径向基函数神经网络对LADRC参数进行在线自动调整的新方法,并将该策略应用于直接升力控制自动着舰系统中。利用Lyapunov稳定性理论分析了控制系统的稳定性,并将仿真结果与传统的LADRC、比例-积分-微分控制器(proportional-integral-derivative controller,PID)控制方案、反向传播神经网络结合线性自抗扰控制(back propagation neural network combined with liner active disturbance rejection control,BP-LADRC)以及自适应滑膜控制进行了比较。结果表明,该方法能够快速、稳定地跟踪理想下滑道,并且对外部干扰具有良好的鲁棒性。
1 着舰模型建立
舰载机着舰如图1所示。本节介绍纵向飞机模型和舰尾流模型。

图1 舰载机着舰阶段Fig.1 Carrier-based aircraft landing phase
1.1 舰载机纵向非线性模型
舰载机的纵向飞行状态选择在没有大气干扰的情况下以70 m/s的恒定速度直线飞行,迎角为9.1°,襟翼偏转为20°,飞行轨迹角为-3.5°,3个控制效应器为升降舵δe、襟翼δf和油门杆δpl。舰载机的纵向方程如下[21]。
力方程:
导航方程:
力矩方程:
飞机的阻力、升力和俯仰力矩分别为
式中:V为速度,γ为飞行轨迹角,α为迎角,q为俯仰角速率,θ为俯仰角,CM、CD和CL分别为俯仰力矩系数、升力系数和阻力系数,ρ为空气密度,h为高度,Iyy为俯仰惯性力矩,P为发动机推力,M为俯仰力矩。
1.2 舰尾流建模
采用美国军事标准MIL-F-8785C对舰尾流建模[22]。舰尾流由水平纵向部分u、水平横向部分v和垂直部分w等3个部分组成:
式中:u1、v1、w1为自由大气紊流分量,u2、w2为稳态分量,u3、w3为周期性分量,u4、v4、w4为随机性分量。
1.3 舰载机在舰尾流扰动时的纵向线性模型
飞机在遇到阵风时,空气动力学会发生瞬变[23-25]。为了通过线性模型分析舰尾流对飞行状态的影响,根据以下思路对纵向线性模型进行扩展。本文只研究飞机纵向运动,因此可以忽略水平横向部分的影响。
如果u>0,在空气动力学上相当于空速的降低,关系为
如果w>0,飞行状态立即发生变化,如图2所示,考虑到风速通常远小于飞行速度,v和vI之间的角约等于w/v*,因此:

图2 舰尾流中姿态和空速的关系Fig.2 Relationship between attitude and airspeed in carrier air-wake
假设风速参考值为零,因此Δu=u,Δw=w;则带舰尾流扰动的飞机纵向线性模型为
2 控制器设计
2.1 通过RBF神经网络优化的LADRC
对于如下二阶系统:
为了使输出跟踪参考信号,有必要设计二阶RBFLADRC方案。下面将详细介绍该控制器的构造。
1)线性跟踪微分器。
线性跟踪微分器(linear tracking differentiator,LTD)的具体实现为
式中:xd为期望值;xd1为软化后的期望值;xd2为xd1的微分信号;r为快速因子,用于调整过渡过程的速度。
2)线性扩展状态观测器。
将二阶系统中的总扰动视为扩展状态变量:
在式(4)的基础上建立一个三阶LESO为
式中:为对x1的精确估计;为对整体扰动的估计;βi(i=1,2,3)为观测器增益,β1=3w0,β2=3w20,β3=w30,其中w0为观测器带宽[26]。
3)线性状态误差反馈。
在LESO准确估计总扰动的情况下,设计控制器为
忽略估计误差,将系统降为级联积分系统为
由于LTD对参考信号的精确跟踪和对输出信号的精确估计,级联积分器系统可以很容易地由PD控制器控制:
为了简化参数设置,引入RBF神经网络对kp和kd进行实时调整。
RBF神经网络是3层前馈网络,只有一个隐含层[27],如图3所示。RBF神经网络模拟了人脑中局部调节的神经网络结构,已经证明RBF神经网络可以以任意的精度近似任何连续函数[28]。

图3 RBF神经网络结构Fig.3 RBF neural network structure diagram
选择X=[u(k)y(k)y(k-1)]T作为RBFNN的输入向量。
RBFNN的性能指标函数为
根据梯度下降法,输出权重向量、节点中心向量和节点基宽参数的迭代算法为
式中:η为学习率,α为动量因子。
RBFNN的Jacobian信息为
式中x1=u(k)。
梯度下降法被用来调整kp和kd:
基于RBF神经网络的LADRC控制系统的结构如图4所示。
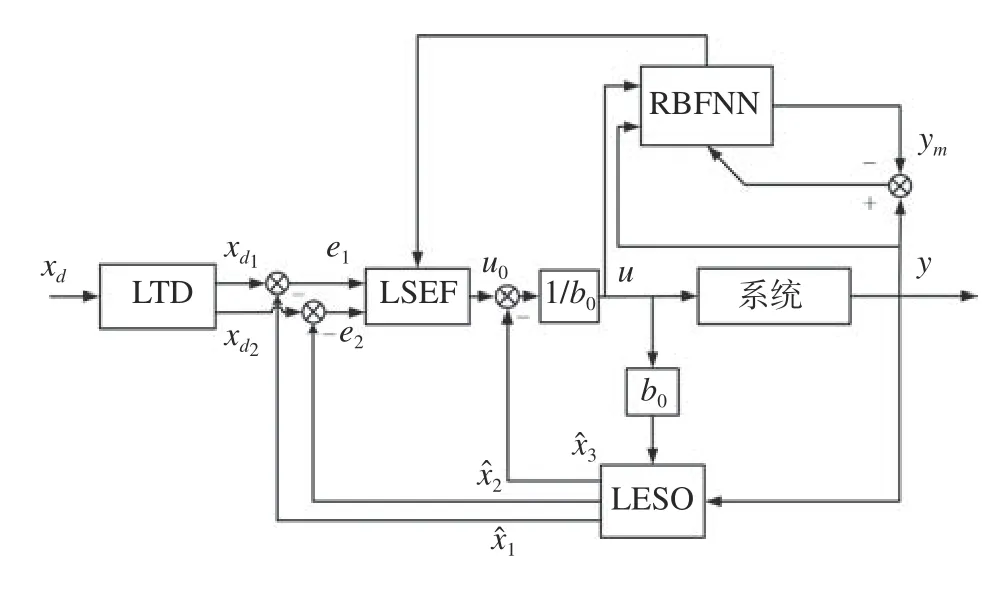
图4 基于RBF神经网络的LADRC结构Fig.4 Structure of RBF neural network based on LADRC
2.2 稳定性分析
本节分析ESO收敛性和引入RBFNN后的闭环系统的稳定性。
ESO估计误差定义为
式(5)和式(7)结合起来,可以得到如下ESO估计误差形式:
式(8)可以表示为
式(9)的解为
设
设ξmax(0)=|ξ1(0)|+|ξ2(0)|+|ξ3(0)|, 对于任意时间t≥T>0,i= 1, 2, 3,可以得到:
设Emax(0)=|E1(0)|+|E2(0)|+|E3(0)|,根据ξi(t)=Ei(t)/,可知:
从上述分析可以看出,ESO的估计误差的上界随着观测器带宽的增加而单调地减少。
为了分析系统的闭环稳定性,构造Lyapunov函数为
根据式(10),得出Lyapunov函数的变化量为
权重的变化量为
其中:
误差方程的线性化模型可以表示为
使用式(6)可以得到:
使用式(12)、(13)可以得到:
根据式(11)、(14),ΔV(k)可以表示为
如果ηx选择为
则式(15)中的ΔV(k)值将小于零。因此V>0和<0,根据 Lyapunov 稳定性定理,闭环系统渐近稳定。
3 直接升力自动着舰系统的设计
在本节中,基于RBF-LADRC的舰载机直接升力控制自动着舰系统的设计如图5所示。

图5 基于RBF-LADRC的直接升力自动着舰系统示意Fig.5 Diagram of the direct lift automatic landing system based on RBF-LADRC
RBF-LADRC的设计将针对纵向引导律、姿态辅助控制通道和APCS进行。详细的设计过程将在下文中说明。
3.1 姿态辅助通道控制器设计方案
迎角、俯仰角和轨迹角之间的关系为
将式(16)代入式(2),可以得到方程:
式(17)在参考点的线性化被扩展为以下方程:
升力的线性化为
将式(19)代入式(18),式(18)变为
设
升降舵的传递函数是一个一阶惯性环节,所以式(20)变成了二阶形式:
将迎角回路中的总扰动视为扩展的状态变量:
在式(22)的基础上建立三阶LESO为
定义迎角误差和迎角误差的微分,其中αd1和αd2是期望迎角输入通过LTD后得到的跟踪和微分信号:
将这2个误差进行线性组合,并对迎角控制回路的总干扰进行前馈补偿,得到最终的控制信号u1为
根据上述RBF-LADRC设计方法设计参数kp和kd,采用梯度下降法调整kp1和kd1。
3.2 进近动力补偿系统控制器设计方案
进场动力补偿系统(approach power compensation system,APCS)用于自动调整油门以控制飞机的进场速度。
式(1)在参考点的线性化被扩展为
推力的变化量为
将式(24)代入式(23),可得:
令:
油门杆作动器传递函数是一个一阶惯性环节,所以式(25)变成了如下的二阶形式:
建立三阶RBF-LADRC为
根据上述RBF-LADRC设计方法设计参数kp2和kd2,用梯度下降法来调整kp2和kd2。
3.3 纵向引导律控制器设计方案
舰载机在着舰过程中受到舰尾流干扰。因此,可以使用RBF-LADRC的纵向引导律来有效抑制干扰。
式(3)在参考点的线性化被扩展为以下方程:
令:
则此时式(26)可写为
将高度环路中的总扰动视为扩展状态,建立线性扩展状态观测器为
定义误差信号为
对这2个误差进行线性组合,并对高度控制回路的总扰动进行前馈补偿,得到最终控制信号u为
根据上述RBF-LADRC设计方法,采用梯度下降法对参数kp3进行设计。
4 着舰仿真结果
当舰载机进入下滑道入口时,初始条件设定为:舰载机的飞行高度为h0=114.3m,舰载机理想着陆点的参考高度为hc=21.1m,参考速度为V0=70m/s。迎角控制在α0=9.1°,轨迹角控制在γ0=-3.5°。在仿真中,RBF-LADRC被应用于舰载机直接升力控制自动着舰系统以验证其着舰性能。此外,RBF-LADRC方案的着舰性能与传统的LADRC、PID、BP-LADRC以及自适应滑膜控制进行了比较。
控制器参数设置为:三通道观测器带宽为w1=10,w2=10,w3=3.5;RBF神经网络参数设置为学习率η=0.25,动量因子α=0.05,m=6。
纵向线性小扰动方程的矩阵具体参数为
4.1 LESO输出估计
从图6可以看出,通过LESO对三通道输出进行估计,精度高,响应快,有利于提高所提控制方案的抗干扰能力。

图6 LESO对输出变化量的估计Fig.6 Estimate of the output variation by LESO
4.2 舰尾流扰动下着舰仿真结果与分析
1)稳定性比较。
从图7可以看出,当不引入RBFNN时,传统LADRC的迎角偏差比较大。所提方法与PID相比,虽然偏差变化不明显,但迎角的波动明显减慢。通过对比分析,新设计方法下的迎角更加稳定。从图8可以看出,所提方法的速度扰动变化明显低于其他控制方法。相比之下,新设计方法的速度稳定性得到了较好的保持,并且可以有效地抑制舰尾流扰动。

图7 迎角变化量对比Fig.7 Comparison of the AOA variation

图8 速度变化量对比Fig.8 Comparison of the velocity variation
从图9和图10可以看出,引入RBFNN后,与传统的LADRC相比,所提方法的俯仰角偏差和俯仰率偏差波动明显减小,最大偏差值降低。相比之下,在RBF-LADRC方法下,舰载机的飞行姿态可以得到更好的保持。减少飞行姿态的偏差可以使航母飞机更平稳地降落,增强系统的稳定性。

图9 俯仰角速率变化量对比Fig.9 Comparison of the pitch angle rate variation

图10 俯仰角变化量对比Fig.10 Comparison of the pitch angle variation
2)轨迹跟踪性能比较。
图11比较了所提方法与其他4种方法的轨迹角偏差,其中所提方法是指本文提出的RBF-LADRC控制器。比较分析表明,在舰尾流的影响下,RBF-LADRC能更好地保持轨迹角的稳定性。在自动着舰模式下,稳定的轨迹角表明此设计可以安全地完成着舰任务。图11给出了所提方法和其他4种方法的轨迹跟踪比较。高度偏差表示仿真结果与理想下滑道之间的偏差。可以看出,基于RBF-LADRC的舰载机直接升力自动着舰系统的跟踪误差在0.2 m以内。舰载机沿着理想的下滑路径着舰。通过稳定性比较部分可以看出,RBF-LADRC略优于BP-LADRC方法,但是轨迹跟踪性能仿真结果表明,所提出的基于RBFLADRC的舰载机直接升力自动着舰系统在有舰尾流干扰的情况下能更好地跟踪理想下滑道。

图11 飞行轨迹对比Fig.11 Comparison of flight path
4.3 执行器故障时着舰仿真结果与分析
为进一步验证本文设计的RBF-LADRC的鲁棒性,当执行器存在以下时变故障情况时进行仿真分析。发动机故障δpf=10sinπt/2.5(°)在t=4s处引入;升降舵故障 δef=8sinπt/2.5(°)在t=5s引入。
1)稳定性比较。
从图12~15可以看出,与其他方法相比,当飞机遭受干扰和时变故障时,所提出的方法的姿态角和速度更加稳定。

图12 迎角变化量对比Fig.12 Comparison of the AOA variation

图13 速度变化量对比Fig.13 Comparison of the velocity variation

图14 俯仰角速率变化量对比Fig.14 Comparison of the pitch angle rate variation

图15 俯仰角变化量对比Fig.15 Comparison of the pitch angle variation
2)轨迹跟踪性能比较。
从图16可以看出,所提出方法的轨迹角和高度变化均小于其他的控制方法,可以更好地跟踪理想下滑道的误差。


图16 飞行轨迹对比Fig.16 Comparison of flight path
5 结束语
1)本文设计了基于RBFNN结合线性自抗扰控制的舰载机直接升力自动着舰系统,能够较好地抑制舰尾流的扰动。对着舰系统进行仿真并与PID 控制器和传统LADRC进行对比,结果表明该方法不仅抑制了舰尾流扰动,准确补偿了扰动造成的偏差,而且显著提高了系统的性能和鲁棒性,并能保持轨迹角的稳定性。
2)从仿真结果可以看出,所设计的控制方案是有效的,其设计思想和方法值得借鉴,如可应用于旋翼机、固定翼飞机、推力矢量飞机等。
3)未来将进一步研究如何利用该方法的鲁棒性和学习能力处理着舰系统的控制输入饱和、襟翼执行器故障等复杂控制问题。
猜你喜欢
实验流体力学(2023年1期)2023-03-21
北京航空航天大学学报(2021年6期)2021-07-20
装备制造技术(2020年1期)2020-12-25
空间科学学报(2020年4期)2020-04-22
雷达学报(2017年6期)2017-03-26
北京航空航天大学学报(2016年3期)2016-02-27
天津大学学报(自然科学与工程技术版)(2015年10期)2015-12-29
舰船科学技术(2015年8期)2015-02-27
科技传播(2014年4期)2014-12-02
长江科学院院报(2010年10期)2010-09-05