采用子阵多输入多输出的天基预警雷达强杂波抑制方法
2024-04-10 07:50周贺吴建新张磊
西安交通大学学报 2024年4期
周贺,吴建新,张磊
(中山大学电子与通信工程学院,518107,广东深圳)
近几十年来,天基预警雷达系统凭借平台高度优势及更高的机动特性和更宽的探测范围,在交通监测、气象监测等方面得到了广泛应用[1-6]。然而,天基雷达高平台意味着需对机动目标进行远距离观测,平台高速运动容易出现严重的多普勒模糊、距离模糊和低信杂噪比(signal to clutter noise ratio, SCNR)等问题[7-8],这将导致杂波呈现复杂非平稳特性,使得用于估计杂波协方差矩阵的独立同分布(independent and identical distribution,IID)训练样本数严重不足,进而导致传统空时自适应处理(space-time adaptive processing,STAP)方法性能无法满足实际应用需求[9-12]。
长时间积累技术能有效提高回波信噪比(signal to noise ratio, SNR),是提高雷达机动目标检测能力的一种有效方法。长时间相参积累(long-time coherent integration, LTCI)[13]同时利用信号幅度和相位信息,实现快时间和慢时间维联合积累以获得更高积累增益,但在较长积累时间内,可能会出现复杂距离徙动和多普勒频率扩散现象,影响积累效果。另外,传统体制雷达多为高增益窄波束模式,无法保证足够有效长积累时间,限制了长时积累技术的发展和应用。
近年来,多输入多输出(multiple-input multiple-output,MIMO)雷达体制因其波形分集具有较高空间自由度受到工程及科研人员的广泛关注,在波形设计、参数估计和目标检测等方面涌现了大量研究成果[14-18]。MIMO 雷达其中一个重要优势在于发射固定波束因此不需要对空间进行扫描,波束范围内同一目标被照射时间大大延长,这为长时间相参积累提供了足够的时间保障。另外,相控阵MIMO新体制雷达(也称子阵级MIMO雷达)[19]结合MIMO雷达和相控阵雷达优点,将系统发射阵列划分为多个子阵,每个子阵向空间目标发射正交信号形成虚拟孔径扩展,提高了目标探测能力。子阵内发射相干信号,提高雷达功率利用率和接收端信噪比,进而提高雷达系统目标检测和参数估计性能。
针对上述天基预警雷达存在严重距离模糊和多普勒模糊导致杂波背景强,且传统STAP方法已无法适用的问题:本文首先分析天基雷达下变加速机动目标相参性,即确定不发生多普勒频率扩散和只具有线性距离徙动的最大相参积累时间;然后,针对子阵级MIMO雷达长驻留的特点采用长时间积累技术提高信噪比;同时,提高多普勒分辨率,降低一个距离-多普勒单元的杂波功率,进而降低该单元杂噪比(clutter to noise ratio,CNR),并采用3/5准则检测盲区图评估天基雷达检测性能;最终,改善输出信杂噪比,从而提高天基雷达目标检测概率。
1 子阵级MIMO天基雷达模型
1.1 信号模型
假设天基子阵级MIMO雷达收、发阵元数分别为N和M,并将M个发射阵元均匀划分为K个子阵,每个子阵有L个发射阵元,子阵内间距为d=λ/2(λ为工作波长),则子阵间间距为LD,如图1所示。同一子阵阵元发射相同窄带波形,第k个子阵发射波形为sk(t),发射信号矢量可写为

(a)子阵发射正交信号
s(t)=[s1(t), ,sk(t), ,sk(t)]T
(1)
不同子阵间发射信号应满足正交条件,即发射信号的自相关矩阵为单位阵
(2)
第n个接收阵元接收到的位于θ0方向的远场目标回波信号为
x(t)=αbT(θ0)s(t-τ)+n(t)
(3)
式中:x(t)、a(θ0)、b(θ0)、n(t)分别表示雷达接收信号矢量、目标发射导向矢量、接收导向矢量及噪声矢量,表达式分别如下
x(t)=[x1(t),x2(t), ,xN(t)]T
(4)
a(θ0)=[1, e-jφ0, , e-j(M-1)φ0]T
(5)
b(θ0)=[1, e-jφ, , e-j(N-1)φ]T
(6)
n(t)=[n1(t),n2(t), ,nN(t)]T
(7)
n(t)可建模为均值0、协方差矩阵为σ2I的高斯白噪声[20];φ0=L(2πdsinθ0)/λ为子阵间空间相位差;φ=(2πdsinθ0)/λ为接收阵元空间相位差;τ为总时延。
1.2 子阵级MIMO雷达信噪比分析
(8)
式中:Pa为天基雷达发射平均功率,由于发射阵列均分为K个子阵,则每个子阵发射功率为Pa/K;Ta为相干积累时间;Gt和Gr分别为发射和接收天线增益;σ0为目标截面积;Rt及Rr分别为发射机和接收机到目标的距离;k为玻尔兹曼常数;T0为标准温度;Fn为噪声系数;Ls为雷达系统损耗。
具有相同阵列形式的相控阵雷达全阵列接收信号信噪比可表示为
(9)
比较式(8)和式(9),得到
(10)
由此可知,子阵级MIMO雷达输出信噪比仅为相控阵雷达的1/K,在其他参数不变情况下,需要K倍的相参脉冲积累才能达到和相控阵雷达相同输出信噪比。
2 远距离机动目标相参性分析
因天基平台高速运动及采用长时间相参积累,目标极易发生距离徙动和多普勒频率扩散,本节将讨论目标出现线性距离徙动及不发生多普勒频率扩散现象的最大相参积累时间。
图2为天基平台与机动目标在斜矩平面内的几何结构,A为目标初始位置,B为经过一段时间后目标位置,平台运动速度为v,目标的方位向速度和径向速度分别为va和vc,aa和ac分别表示目标的方位向加速度和径向加速度,R0表示天基雷达到目标最近斜矩。一个相干脉冲积累时间内雷达发射的脉冲数为Q,雷达的脉冲重复周期为Tr,则积累时间Ta=QTr,并假定在积累时间内天基平台运动速度、目标的方位向速度、径向速度、方位向加速度均保持不变。
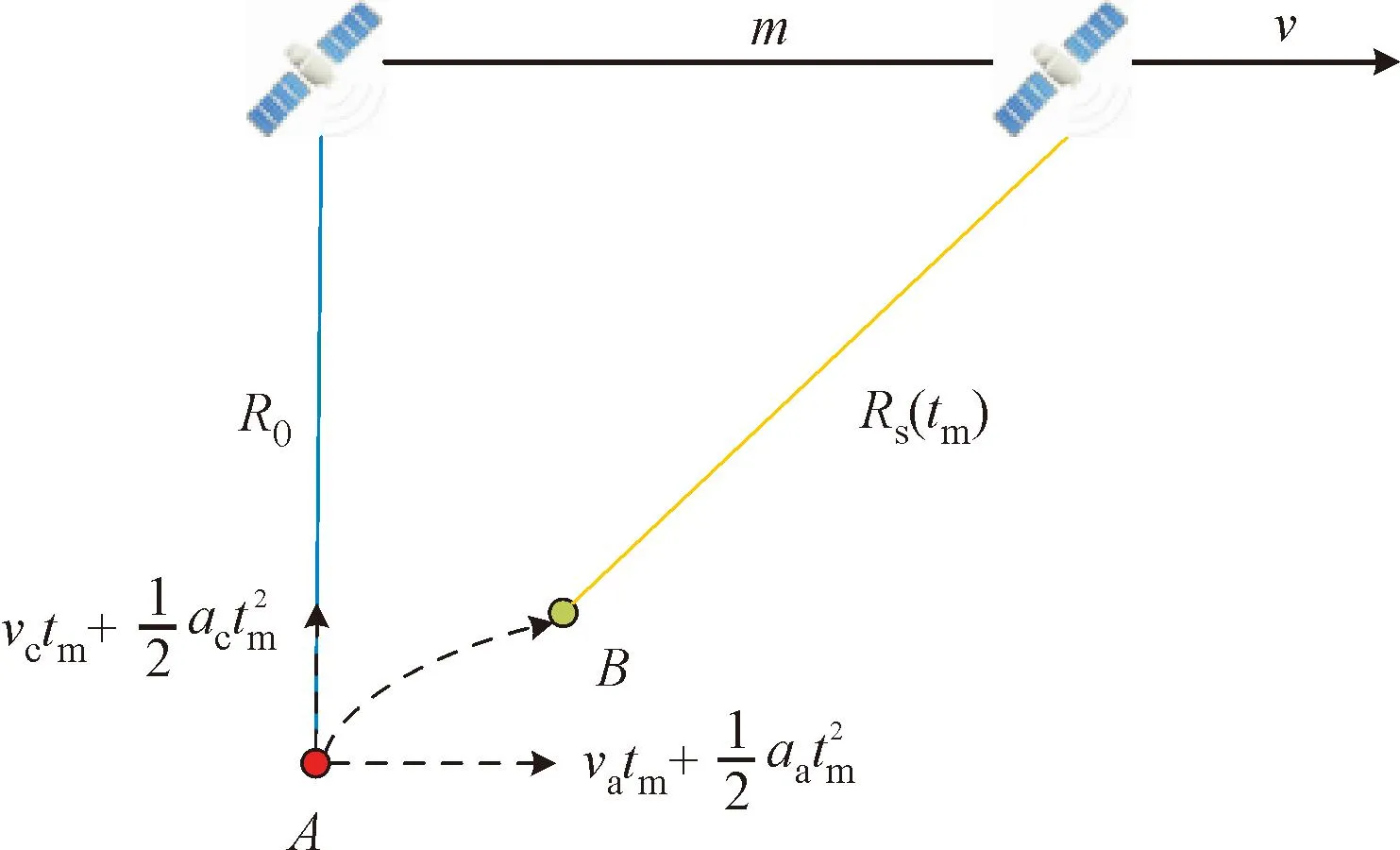
图2 天基平台和机动目标在斜距平面内的几何结构Fig.2 Geometry of space-based platforms and maneuvering targets in the oblique distance plane
由图2可知,天基平台和机动目标的瞬时斜矩可表示为
R(tm)=
(11)
式中:tm=qTr(q=0,1,,Q-1)为慢时间变量。对瞬时斜矩在tm=0处进行泰勒展开
(12)
a1=-vc
(13)
(14)
(15)
式(13)~(15)分别表示天基平台与目标之间的速度、加速度和第二加速度。
假设子阵级MIMO雷达子阵内第l个阵元发射窄带线性调频信号为
(16)
(17)
式中:rect是矩形窗函数;Tp和fc分别为脉冲宽度和载频;μ为距离调频率。
第n个接收阵元收到的基带信号可表示为
(18)
sr,l(t,tm)=
(19)

Δr=Rs(tm)-R0-a1tm≤λ/2
(20)
由式(19)和式(20)可知,当积累时间不断增加,回波包络位置变化量超过距离分辨率时,只发生线性距离徙动,可通过Keystone变换[21]对其进行矫正。
为了实现天基雷达机动目标良好相参积累,在某一瞬时斜矩和目标等效速度下,子阵级MIMO天基雷达应存在一个最大允许相干积累时间Tm,在所允许相干积累时间内直接进行傅里叶变换将不会出现多普勒频率扩展现象。
3 长时间相参累积降低距离多普勒单元杂噪比原理
由第2节可知,当相干积累时间不超过Tm,机动目标可用一阶运动模型描述,此时采用长时间积累技术可提高多普勒分辨率,进而降低一个距离-多普勒单元的杂噪比,最终通过提高信杂噪比来改善目标检测性能。
具体地,对于信号带宽为B、积累时间为Ta的天基雷达,其距离分辨率为ΔR=c/2B,多普勒分辨率可近似表述为Δfd=1/Ta[22]。由此可看出,随着积累时间的不断增加多普勒分辨率越来越高。已知某一距离-多普勒杂波单元的俯仰角和方位角分别为φi和θi,几何关系如图3所示。H为天基雷达轨道高度,Re为地球半径,Rs(tm)为天基平台某一距离-多普勒单元D的瞬时斜矩,φg为擦地角。
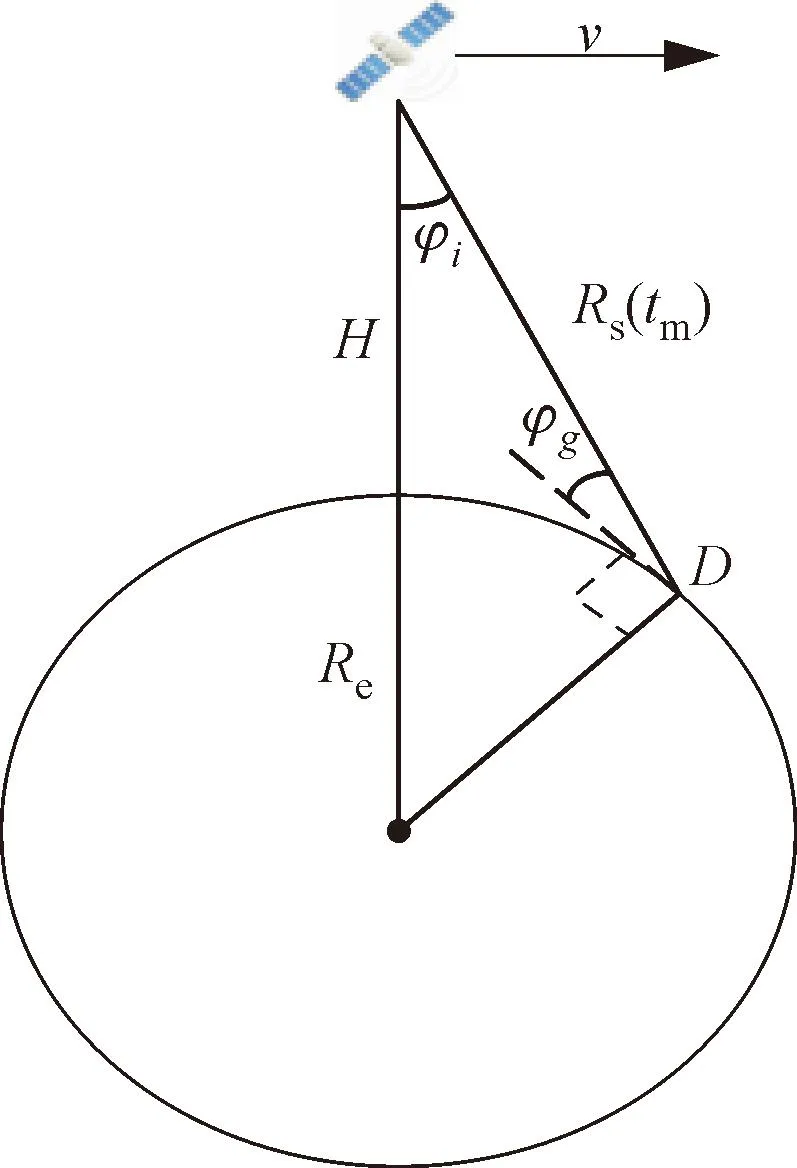
图3 天基平台和某一距离-多普勒单元几何关系Fig.3 Space-based platform and geometric relation of a certain range-Doppler element
假设天基雷达工作在正侧阵构型,此时多普勒频率为
(21)
对上式两边求微分可得
(22)
当sinθi=1时,可获得最大多普勒通道
(23)
对于某一距离-多普勒杂波单元,有效截面积可表示为
(24)
式中:σv为后向散射系数。
此时,天基雷达收到该距离-多普勒单元杂波功率可写为
(25)
输出噪声功率可表示为
Pn=kT0BFn
(26)
则该距离-多普勒单元杂噪比可表示为
(27)
由式(27)可知,在其他参数确定情况下,随着积累时间不断增加,单个距离-多普勒单元有效截面积不断减小,导致到达天基雷达杂波功率下降,进而降低单个距离-多普勒单元的杂噪比,最终增加信杂噪比提高目标检测概率。
4 天基雷达系统检测性能评估
检测盲区图是一种可评估雷达系统性能好坏的有效方法[23],所谓检测盲区图是指距离-速度二维平面,图中每个点只有0 和 1两种值分别代表没有检测到目标和可以检测到目标。对于某一距离和某一速度的目标,可以从检测盲区图中直接看出其是否能被检测到。天基雷达在进行目标检测时可采用多脉冲重复频率(pulse repetition frequency, PRF)联合检测方法提高检测性能,本文采用 3/5 准则检测,即天基雷达在一个波位处连续发射多组PRF相干脉冲,若有3组或3组以上可以检测到同一距离同一径向速度处的目标,则认为该位置存在目标。
图4为多PRF下检测盲区图形成过程[24]。图中:Pd为检测概率;Pfa为虚警概率。给定雷达系统参数,对于特定目标散射横截面积,在子阵级MIMO天基雷达系统下,式(8)已给出目标信噪比随距离变化关系,而理论计算的整个杂波场景下某一距离-多普勒单元杂噪比可表示为
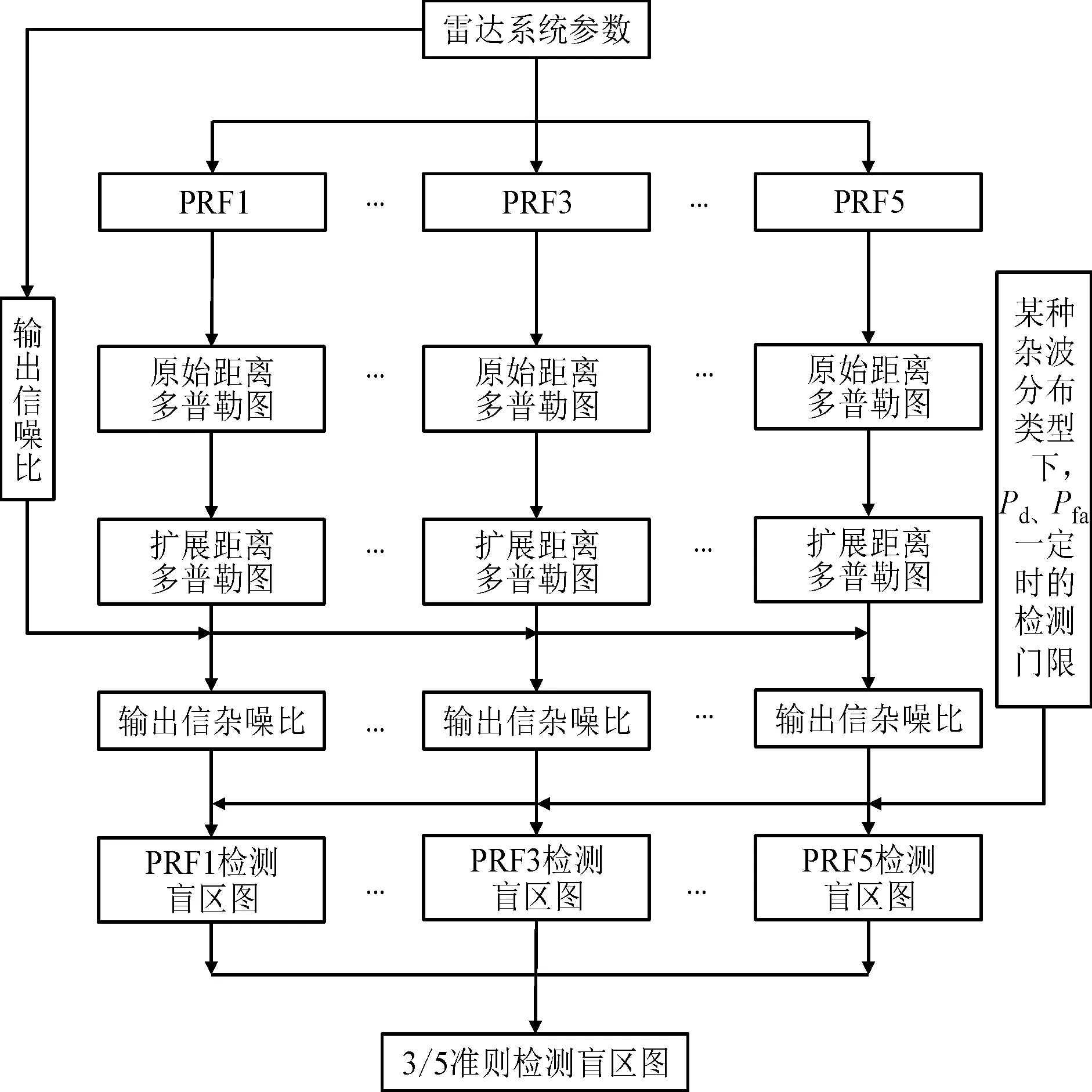
图4 多PRF下检测盲区图形成过程Fig.4 The formation process of detecting the blind area map under multiple PRFs
(28)
原始距离多普勒单元的杂噪比是在理论计算整个杂波场景杂噪比基础上通过距离、多普勒模糊折叠并相加得到。
对于扩展距离多普勒图即为原始距离多普勒图根据距离模糊和速度模糊次数分别在距离和多普勒维扩展的杂噪比图。设目标的探测距离范围是Rl∈[0,Rmax],目标的探测速度范围为vt∈[-vm,vm]。雷达系统的最大不模糊距离为Ru,某一组PRF为fr,j,则对于斜矩为Rl、速度为vt的目标,其在原始距离多普勒图坐标可表示为(mod(2v/λfr,j,1), mod(Rl,Ru)),从而可以得到与该目标竞争的杂噪比为(ICNR,i(mod(Rl,Ru,j), mod(fd/fr,j,1)),将该杂噪比代入扩展距离多普勒图中,可得
ICNRE,i(vt,Rl)=
ICNR,i(mod(2vt/(λfr,j),1), mod(Rl,Ru,j))
(29)
根据输出信噪比和扩展杂噪比,可得输出信杂噪比
(30)
比较输出信杂噪比和检测门限,可得单PRF下检测盲区图,图中像素值为
(31)
式中:ξ为检测门限,需由检测概率、虚警概率和信杂噪比三者之间的关系来确定[25]。根据3/5 检测准则,得到检测盲区图,图中像素值为
(32)
5 实验仿真分析
本节将探究天基雷达下远距离机动目标线性距离徙动和不出现多普勒频率扩散现象的条件,验证子阵级MIMO天基预警雷达可通过长时间积累提高信噪比,分析MIMO天基雷达长时间积累杂噪比及检测性能。假设天基MIMO雷达系统工作在正侧阵构型下,其具体系统参数如表1 所示。
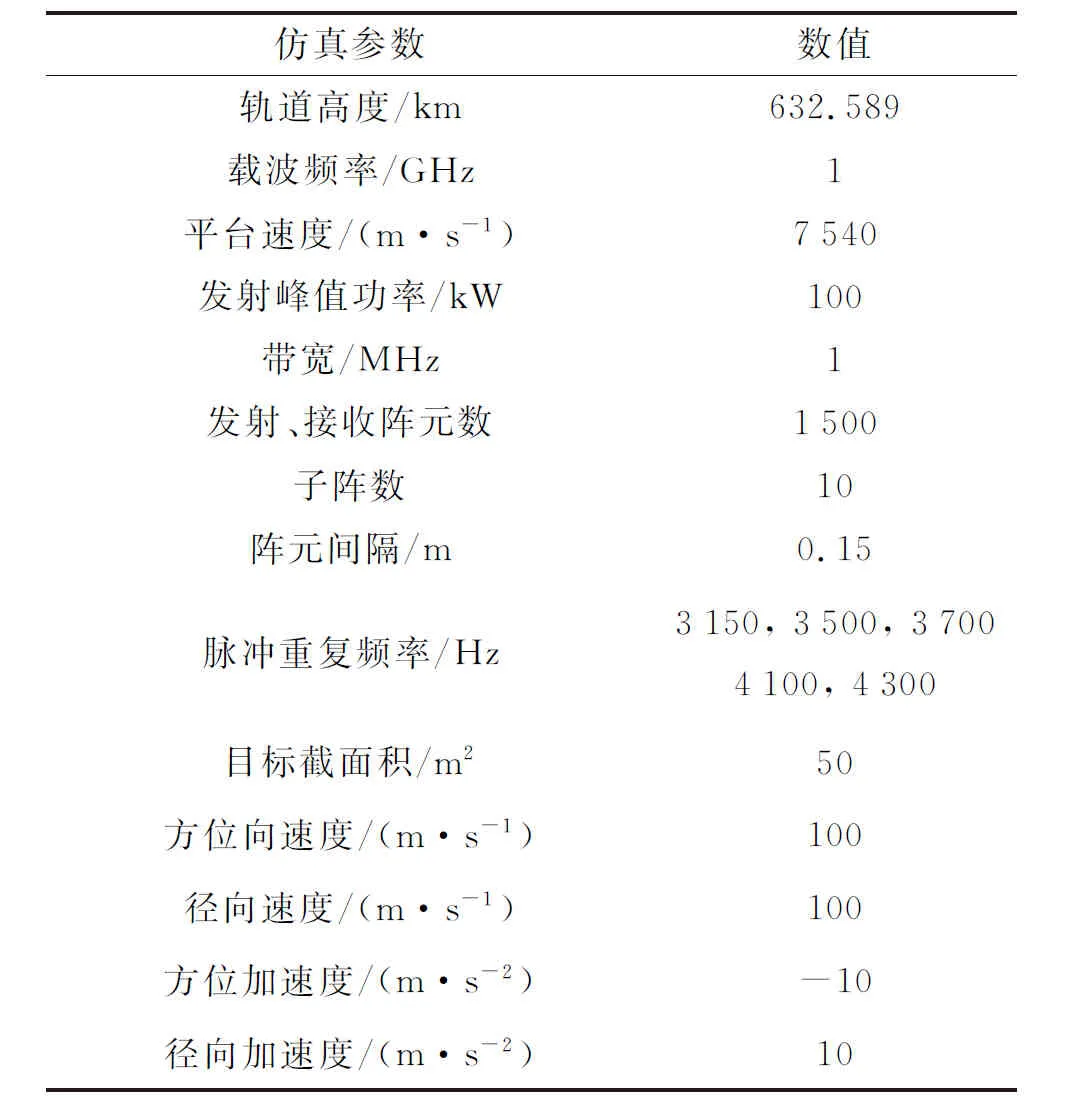
表1 天基MIMO雷达系统仿真参数Table 1 Simulation parameter of space-based MIMO radar system
5.1 机动目标相参性分析
探究天基雷达下远距离机动目标线性距离徙动和不出现多普勒频率扩散现象条件。在图2天基平台和机动目标几何场景下,图5给出了相干积累时间、雷达最大探测距离和偏移量的关系。由图5可知,在其他雷达参数确定下,偏移量会随着最大探测距离不断增大和相干积累时间不断减小而越来越小。其中,红线表示满足条件的临界值,红线上半部分为符合条件的相干积累时间和最大探测距离所在区域。例如,当天基雷达探测距离为2 000 km时,所允许最大相干积累时间为0.136 s,即机动目标在2 000 km内且相干积累时间不超过0.136 s就不会出现多普勒频率扩散现象。
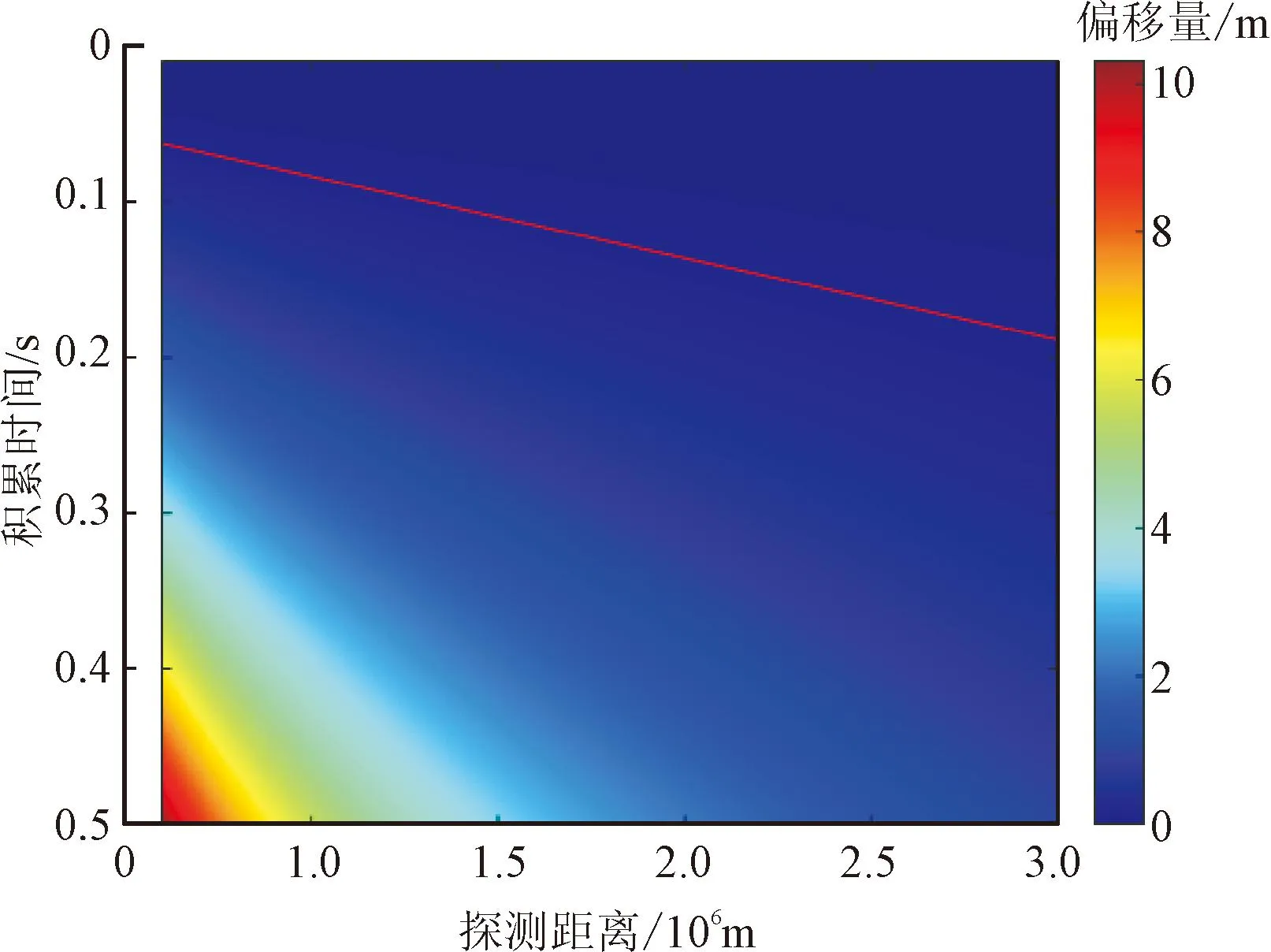
图5 相干积累时间、雷达最大探测距离和偏移量的关系Fig.5 Relationship between coherent accumulation time, maximum radar detection distance and offset
图6(a)为积累时间不超过Tm时目标发生线性距离徙动,图6(b)为Keystone变换对线性距离徙动进行校正,图6(c)为脉冲多普勒(pulse Doppler, PD)处理后的目标,说明并未发射多普勒频率扩散现象,证明了采用长时间积累的可行性。

(a)目标线性距离徙动
5.2 MIMO雷达通过长时间积累提高信噪比
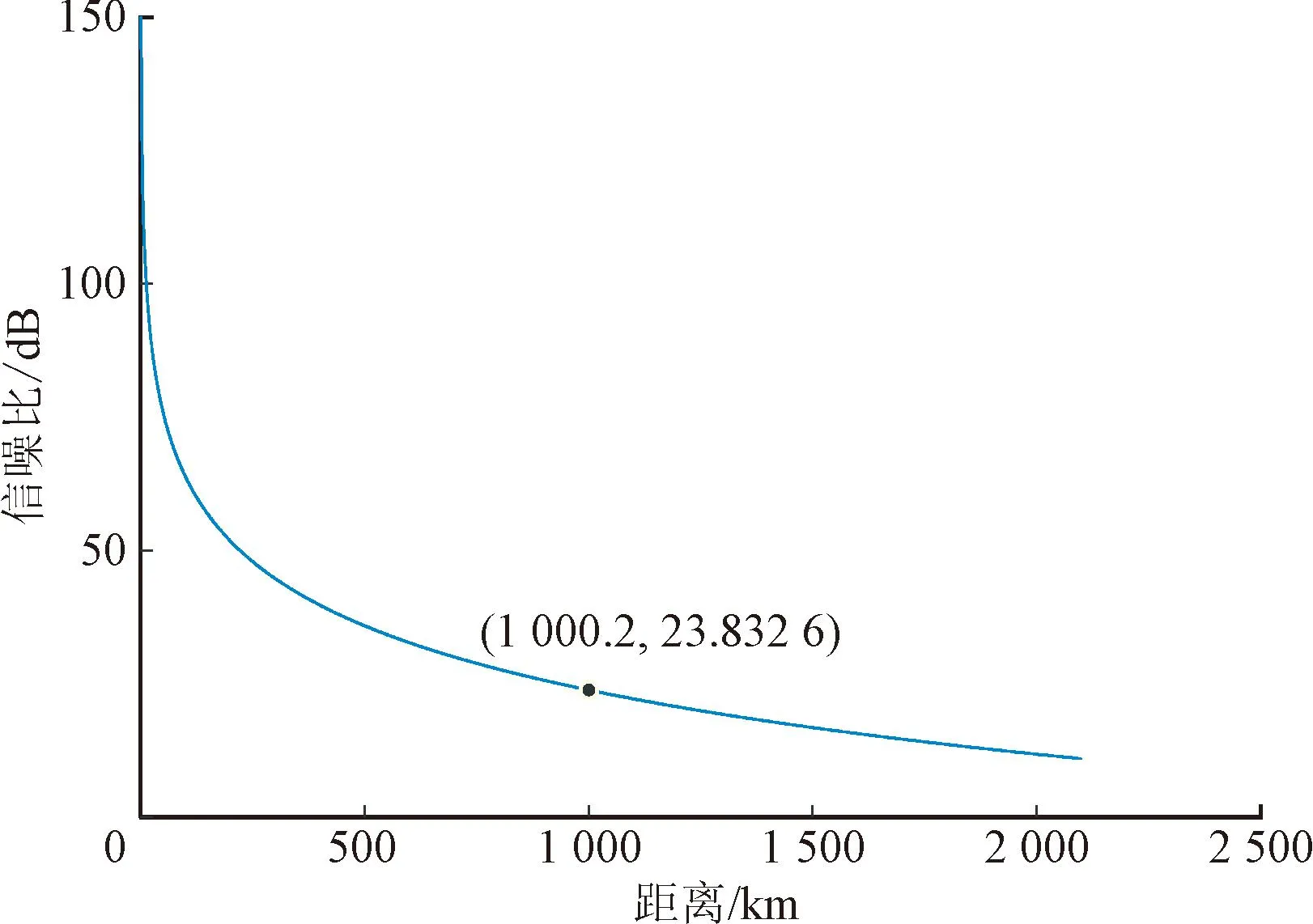
为了便于比较,设定相控阵具有相同的阵列构型。由图7可知,两种模式下输出信噪比均随雷达探测距离不断增大而逐渐减小,但子阵级MIMO模式下需更长相干积累时间才能达到同相控阵相似的输出信噪比,且积累时间倍数恰好为均匀划分子阵个数,这符合式(10)中的理论推导。
(a)相控阵模式,相干积累时间0.01 s
5.3 子阵级MIMO天基雷达长时间积累CNR分析
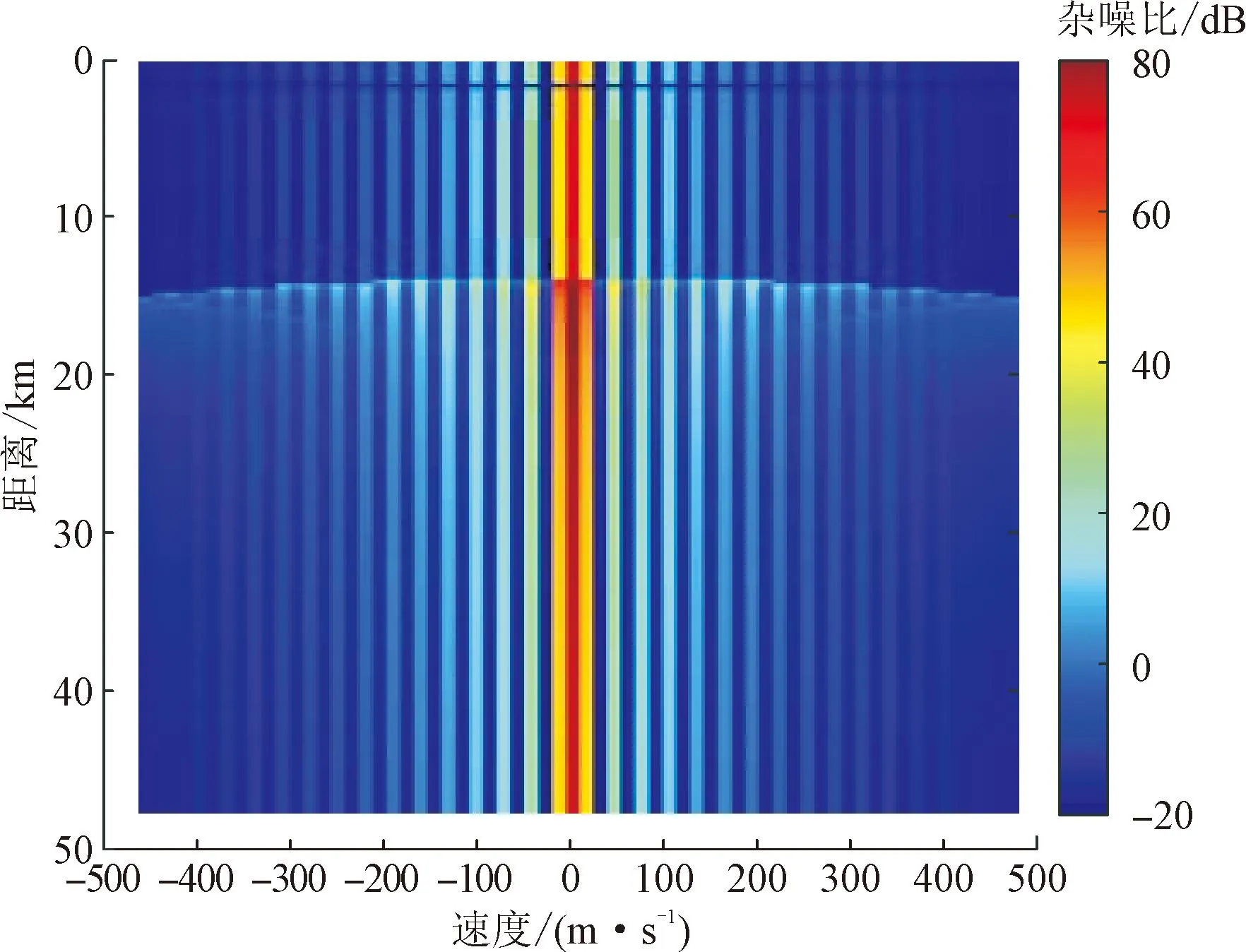
图8为理论计算的整个杂波场景在距离速度平面上的杂噪比图。其中,图8(c)子阵级MIMO模式相干积累时间为0.1 s,相较图8(a)相控阵模式和图8(b)文献[10]中传统STAP方法且相干积累时间0.01 s时输出杂噪比更低,由于天基雷达杂波严重的距离模糊和多普勒模糊导致STAP性能下降。为了进一步说明,图9展示了3种方法在0速度和1 500 km距离下输出CNR随探测距离和速度变化曲线,本文所提方法比相控阵模式和相控阵STAP处理具有更低的输出CNR,证明了本文采用长时间积累降低天基MIMO雷达输出CNR可行性及有效性。

(a)相控阵模式,相干积累时间0.01 s
5.4 子阵级MIMO天基雷达检测性能分析
由5.2节可知,子阵级MIMO雷达通过长时间积累达到了同相控阵雷达相似的输出信噪比。脉冲重复频率为3 150 Hz时,图10和图11分别给出了两种阵列模式下经过距离、多普勒模糊折叠相加后的杂噪比图,即原始距离多普勒图和距离、多普勒模糊次数扩展后的杂噪比图。由图10和图11可知,子阵级MIMO模式下,不管是在折叠后还是扩展后的杂噪比均比相控阵模式下的CNR更低。
(a)相控阵模式,折叠后的杂噪比图
图12给出了相控阵和子阵级MIMO模式下,在整个探测区域内的输出信杂噪比图。由此可看出,随着探测距离的不断增大,两种阵列模式下输出SCNR均逐渐减小。
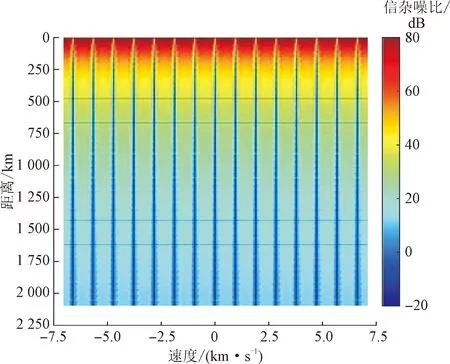
(a)相控阵模式,输出信杂噪比图
由上述分析可知,检测门限由检测概率、虚警概率和信杂噪比共同确定。表2给出了3种杂波分布类型下的检测门限,单PRF下检测概率Pd为0.5,虚警概率Pfa为10-6,本文设定杂波分布为瑞利分布,则满足此检测条件最小检测门限为11.242 6 dB。图13为脉冲重复频率为3 150 Hz两种阵列模式下盲区检测图,其中红色部分表示可检测区域,蓝色部分为盲区。图13(a)为相控阵雷达检测盲区图,可检测区域占所有检测范围百分比为76.62%,而图13(b)子阵级MIMO模式下可检测区域占所有检测范围百分比为92.28%,相较相控阵雷达检测性能提升明显。
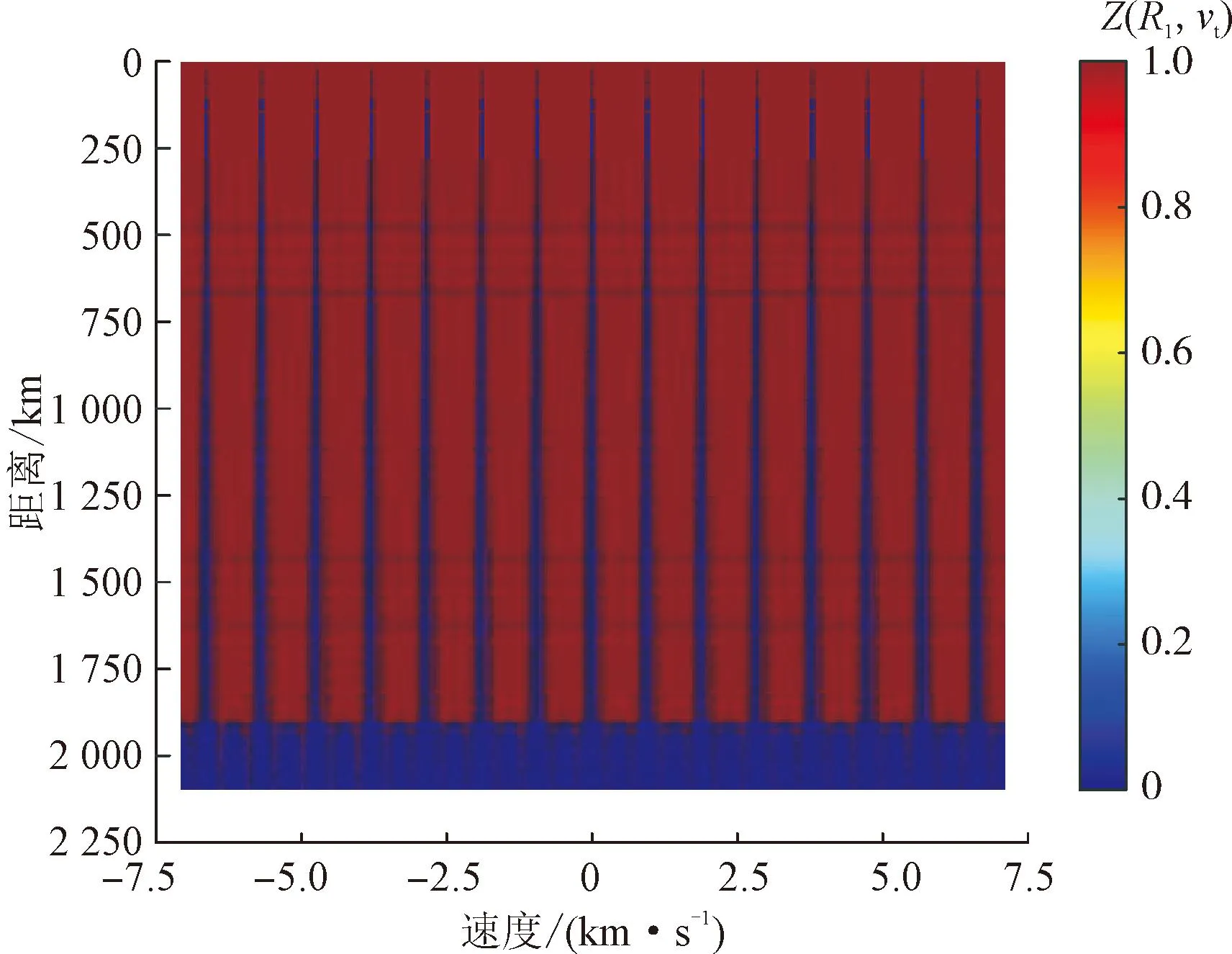
(a)相控阵模式,检测盲区图
图14给出了多PRF下两种阵列模式检测盲区图。相较于图13中单PRF检测盲区图,在多PRF 3/5准则下两种阵列模式检测性能皆有提升。图13(a)中相控阵雷达可检测区域占所有检测范围百分比为87.71%,而图14(a)中子阵级MIMO雷达可检测区域占所有检测范围百分比为94.63%。由图13和图14可知,如不做特殊要求,子阵级MIMO雷达不需采用多PRF检测,在单PRF下即可达到很好的检测性能,而相控阵雷达只有在多PRF下才可具有较好的检测性能。
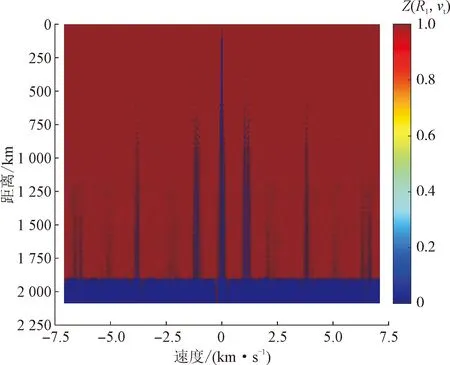
(a)相控阵模式,检测盲区图
6 结 论
本文针对天基预警雷达具有较强的杂波背景及传统STAP方法无法有效抑制的问题,提出一种基于子阵级MIMO改善天基预警雷达检测性能的强杂波抑制方法。实验结果表明:在所允许最大相干积累时间内,目标只发生线性距离徙动和不出现多普勒频率扩散,在最大探测距离下证明了采用长时间积累的可行性,Keystone变换后可直接进行相参积累,不影响后续检测性能。另外,所提方法在单PRF下相较相控阵天基雷达检测性能提升约20.48%,而相控阵雷达只有在多PRF检测下才具有较好的检测效果。
猜你喜欢
电子技术与软件工程(2022年8期)2022-07-08
趣味(数学)(2022年4期)2022-07-02
国际太空(2022年1期)2022-03-09
空间科学学报(2021年2期)2021-07-21
舰船电子对抗(2019年4期)2019-09-10
航天电子对抗(2019年4期)2019-06-02
铁道通信信号(2018年12期)2019-01-31
资源再生(2017年4期)2017-06-15
中国卫生(2015年5期)2015-11-08
电子设计工程(2014年23期)2014-02-27