机器人辅助手术矫正青少年重度特发性脊柱侧弯
2024-04-19 07:00李雅南李殿国吴东进曹光庆孙小刚徐加龙张振华刘帅
中国矫形外科杂志 2024年7期
李雅南,李殿国*,吴东进,曹光庆,孙小刚,徐加龙,张振华,刘帅
(山东大学第二医院:a 儿外科,b 脊柱外科,山东济南 250033)
脊柱侧弯是一种包含冠状位、矢状位和轴位上序列分布异常的脊柱三维畸形,主要表现为脊柱侧向弯曲和旋转畸形[1]。临床中普遍认为Cobb 角>80°为重度脊柱畸形[2],严重者因脊柱解剖结构变异所致胸廓畸形异常进而影响心肺功能,甚至缩短寿命,对青少年的心理健康造成巨大困扰[3]。单纯后路全椎体截骨术(posterior vertebral column resection, PVCR)已经被证实有良好的的临床效果[4],其最早在2005 年由Suk 等[5]进行了报道,术中椎弓根螺钉成功置入是脊柱侧弯矫形的关键,然而重度脊柱侧弯患者顶椎区域椎体和椎弓根极度旋转、弯曲,其凹侧椎弓根发育不良、凹陷变细变长、相对更薄并出现硬化,且脊髓偏移与椎弓根内侧壁直接接触,这使得椎弓根螺钉置入具有挑战性[6],即使经验丰富的手术医生也无法保证置钉的安全性与准确率[7]。近年来,机器人辅助技术在医疗领域得到广泛应用,极大提高了手术效果,似乎为外科医生减少螺钉置入相关并发症和获得理想的矫正效果提供了新的选择[8,9]。关于机器人辅助技术在胸腰椎手术中的安全性及准确性,已有大量的数据报道[10,11],然而关于机器人辅助下进行PVCR 治疗伴有椎弓根发育不良的重度AIS 的相关研究却少见。本研究将机器人辅助技术应用于PVCR 矫正重度AIS,并与X 线透视下传统置钉技术比较,现将结果报告如下。
1 资料与方法
1.1 纳入与排除标准
纳入标准:(1)所有患者症状、体征及影像学检查均符合AIS;(2)影像测量冠状面Cobb 角>80°(图1a,1b);(3)患者术前资料完整,包括磁共振、CT 三维重建以及标准脊柱全长X 线片、特殊Bending 位影像学检查;(4)所有患者均采用PVCR,同一组医生完成。

图1.患者女性,14 岁。1a, 1b: 术前正侧位X 线片显示重度的侧后凸畸形,冠状面主弯Cobb 角为129.2°,C7PL-CSVL 为32.0 mm,矢状面后凸Cobb 角为75.1°,SVA 为10.3 mm;1c: 体位与切口标记;1d: 机器人系统工作空间的自动配准;1e:在机器人工作站中进行规划置钉;1f: 术中即时三维导航引导下置钉;1g, 1h: 术后正侧位X 线片显示冠状面主弯Cobb 角矫正至55.9°,C7PL-CSVL 矫正至5.1 mm,矢状面后凸Cobb 角矫正至29.0°,SVA 矫正至3.8 mm。Figure1. A 14-year-old female. 1a, 1b: Preoperative anteroposterior (AP) and lateral radiographs showed severe kyphosis, with coronal main curvature Cobb angle of 129.2°,C7PL-CSVL of 32.0 mm,sagittal kyphosis Cobb Angle of 75.1°and SVA of 10.3 mm;1c:Position and incision marked; 1d:Automatic registration of robot system workspace; 1e:Planning of screw placement in the robot workstation; 1f:Intraoperative real-time 3D navigation guided screw placement; 1g, 1h: Postoperative AP and lateral X-rays showed that coronal main curvature Cobb angle was corrected to 55.9°,C7PL-CSVL to 5.1 mm,sagittal kyphotic Cobb angle to 29.0°and SVA to 3.8 mm.
排除标准:(1)合并严重心肺功能、凝血功能障碍;(2)合并严重脊髓、神经损伤;(3)术前经麻醉科等相关科室评估存在手术或麻醉禁忌,无法耐受手术者。
1.2 一般资料
回顾分析2018 年9 月—2022 年6 月在山东大学第二医院治疗的AIS 患者的临床资料,共26 例符合上述标准,纳入本研究。依据术前医患沟通结果,11例采用机器人辅助置钉,另外15 例采用传统徒手置钉。两组患者性别和年龄构成的差异均无统计学意义(P>0.05),见表1。本研究经山东大学第二医院伦理委员会批准(编号:KYLL-2023LW096),所有患者法定监护人均签署知情同意书。

表1.两组患者临床资料比较Table 1.Comparison of clinical data between the two groups
1.3 手术方法
患者在气管插管诱导全身麻醉后取俯卧位(图1c),安装神经电生理监测仪,手术全程行动诱发电位(motor evoked potential, MEP)和体感诱发电位(somatosensory evoked potential,SEP)监测。C 形臂X线机透视定位体表标志。行正中切口,显露棘突和双侧椎板、小关节凸,充分暴露术野。
机器人组:将骨科机器人系统与C 形臂X 线机系统相互连接,在棘突上安装示踪器,C 形臂X 线机对手术节段进行扫描,将扫描数据传输至机器人系统,进行三维重建及机器人系统工作空间的自动配准(图1d)。根据图像分别设定截骨头侧与尾侧各钉的进钉点、螺钉方向及大小(图1e)。依次使用机器人辅助微创技术置入导针,沿着导针方向分别拧入合适的椎弓钉(图1f)。
徒手组:按透视引导和局部解剖标志定位进钉点,开髓,使用球形探针探查钉道四壁,依次扩展钉道、攻丝,探针再次探查椎弓根皮质完整性,置入大小合适的椎弓根螺钉。
两组患者均行PVRC,截骨区域附近的侧骨撞击或过度脊髓横向移位可能增加神经损伤的风险时,通常在矫正过程中切除数个相邻椎体。先于凹侧行钉-棒临时固定。确认需切除的顶椎后,切除其棘突及双侧椎板、关节突及横突,咬除椎弓根至基底部。如截骨段在胸椎应切除2~3 cm 和肋骨头、肋横及肋椎关节,术中保护胸膜,防止穿孔。顺着截骨节段凸侧椎体外壁开始钝性分离至椎体前缘,分离过程以棉片保护硬膜以及神经根。用磨钻经椎弓根钻入椎体,建立允许髓核钳进出的工作道;尽可能在壳内咬除多的松质骨,然后切除椎弓根及椎体外侧壁,同时切除该椎体相邻的上下椎间盘以及软骨终板,保留椎体后壁的薄骨壳以保护脊髓。直视下保护脊髓和神经根,使用特制的反向刮匙去除椎体后壁骨壳。安装凸侧钉-棒系统,取除凹侧棒,同上操作截骨,使该部位的脊髓完全悬空,完成全椎体截骨。再次安装凹侧棒,通过双侧钉-棒系统交替调整逐渐闭合截骨处。矫形过程中以凸侧加压为主,凹侧有限撑开,交替调整两侧钉-棒系统,逐步矫正畸形,以免脊髓过度牵拉。最后行截骨区植骨融合。
术后平卧,翻身时严格轴向转动躯干,术后24 h内密切观察患儿下肢运动与感觉功能情况。术后72 h内拔除引流管,如遇脑脊液漏则需延长拔管时间。2~3 d 开始支具保护逐步坐立、下床活动。支具佩戴一般持续6 个月。
1.4 评价指标
记录临床资料,包括手术时间、术中出血量、术中透视次数、术后并发症发生情况、随访过程的患者状况及不良事件。术后行三维CT 扫描,依据Gertzbein-Robbin 分类标准椎弓钉位置分为5 级[12],0 级没有皮质侵犯;1 级为0~2 mm 皮质侵犯;2 级为2~4 mm 皮质侵犯;3 级为>4 mm 皮质突破;准确率计算公式为:[(0 级数目+1 级数目)/组内总置钉数目]×100%。两组患者均行脊柱全正侧位X 线片观察,应用Surgimap 软件测定两组患者术前、术后即刻及术后1 年随访时冠状面主弯Cobb 角、矢状面后凸Cobb角、C7垂线-骶中线偏移[C7vertebra plumb line(C7PL)- central sacral vertical line(CSVL), C7PL-CSVL]、矢状面垂线偏移(sagittal vertical axis, SVA)。计算侧弯校正率,计算公式为:[(术前主弯Cobb 角-术后主弯Cobb 角)/术前主弯Cobb 角]×100%。
1.5 统计学方法
采用SPSS 22.0 软件对数据进行统计分析。计量资料符合正态分布时,以±s表示,两组均值差异采用独立样本t检验,组内不同时间点间采用单因素方差分析,两两比较采用LSD法;资料不符合正态分布时,采用秩和检验。计数资料采用χ2检验或Fisher精确检验。P<0.05 为差异有统计学意义。
2 结 果
2.1 临床结果
两组患者均顺利手术,26 例重度AIS 患者共切除28 个椎体,其中单椎体24 例,双椎体2 例;切除椎体最高为T7,最低为T12。机器人组共置入242 枚螺钉,徒手组置入311 枚。术中两组患者均未发生脊髓损伤、死亡等严重并发症。两组临床资料见表1。虽然机器人组手术时间明显长于徒手组(P<0.05),但机器人组术中透视次数明显少于徒手组(P<0.05),两组术中出血量差异无统计学意义(P>0.05)。
两组患者均获随访至少12 个月,术后患者躯干平衡显著改善,身高和坐高显著增加,生活与运动能力改善。随访过程中,两组患者均未出畸形矫正明显丢失,均无手术翻修。
2.2 影像评估
两组影像学资料见表2,机器人组置钉准确率显著高于徒手组(P<0.05)。与术前相比,术后两组冠状面主弯Cobb 角、矢状面后凸Cobb 角、C7PL-CSVL、SVA 均明显减少(P<0.05);与术后即刻相比,末次随访时主弯Cobb 角、矢状面后凸Cobb 角、C7PL-CSVL、SVA 均无显著改变(P>0.05)。相应时间点,两组间主弯Cobb 角、矢状面后凸Cobb 角、C7PL-CSVL、SVA 的差异均无统计学意义(P>0.05)。
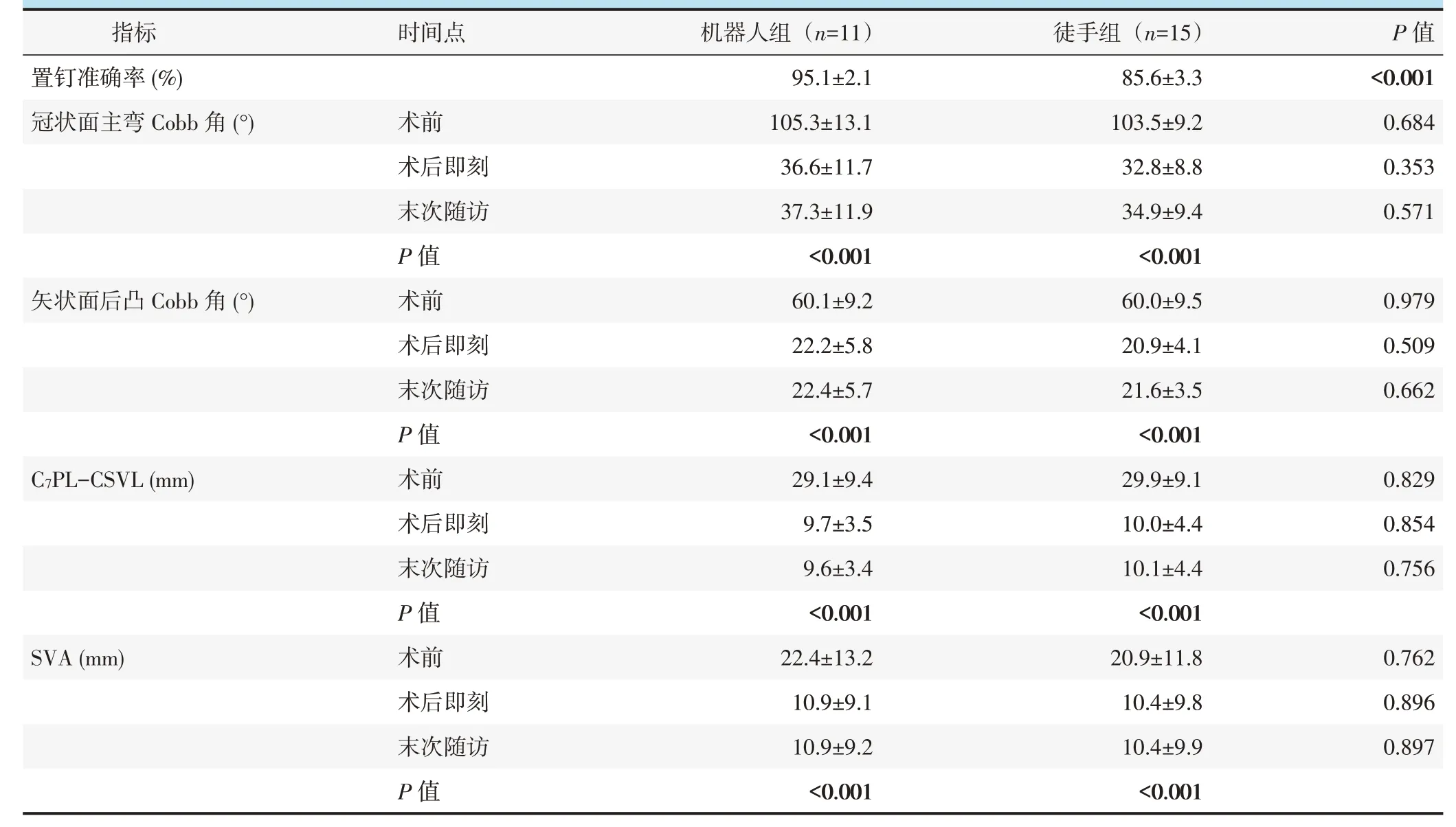
表2.两组患者影像学指标比较Table 2.Comparison of imaging documents between the two groups
机器人组与徒手组冠状面主弯Cobb 角平均矫正率的差异无统计学意义[(68.0±4.6)%vs(69.0±4.7)%,P=0.593]。机器人组与徒手组矢状面后凸Cobb 角矫正率的差异无统计学意义[(38.6±6.3)%vs(38.4±7.6)%,P=0.944]。
3 讨 论
重度AIS 是脊柱三维复杂畸形,不仅有脊柱局部畸形,往往存在整体失衡和脊柱柔韧性下降的情况,外科医师既要注重局部畸形的纠正,也需要重建整体平衡[12]。由于椎弓根螺钉具备强大的三柱矫正力,在近几十年来广泛应用于AIS 矫正手术。然而,许多研究者报道了椎弓根螺钉位置错误的发生率较高,可能导致严重的神经血管并发症。作为一种三维(3D)脊柱畸形,AIS 表现出椎弓根相对狭窄、椎体旋转异常等特点,这可能是由于高错位率引起神经血管并发症的原因,椎弓根螺钉成功、安全的置入是脊柱侧弯矫形成功的关键[13]。Sarwani 等[14]研究发现31.9%的胸椎椎弓根发育异常,凹侧椎弓根异常率10.0%,凸侧为2.9%。Brink 等[15]研究也表明,重度脊柱侧弯患者顶椎区域椎体和椎弓根极度旋转、弯曲,其凹侧椎弓根发育不良、凹陷变细变长使得椎弓根螺钉置入具有挑战性。为了减少椎弓根螺钉异位的发生率,3D 模型、导航系统等辅助椎弓根螺钉置入技术已广泛应用于脊柱外科。虽然3D 模型可以提供更全面的复杂结构,但外科医生不能在术中获得即时的椎弓根信息来调整置入螺钉的方向和深度[16]。此外,有报道称导航系统置入螺钉的准确性仅为85%[17]。更重要的是,这些技术的有限改进可能不会超过复杂的校准程序。因此,应探索更有效、更实用的螺钉辅助技术并应用于手术中,以减少AIS 矫形术中螺钉误置的发生。
机器人辅助手术技术作为脊柱外科的新辅助方式,自其引入临床实践以来,已成为提高螺钉置入准确性、降低潜在神经并发症和术中辐射风险的最有力方法之一[18]。在Khan 等[19]的研究中,患者被分为两组,以比较机器人技术与3D CT 导航在退变性椎间盘疾病中的应用。两组之间在置钉精确性方面没有显著差异,但与3D CT 导航相比,机器人技术可以减少辐射剂量及每枚螺钉的置入时间和患者的住院时间。此外,许多研究也证明了机器人辅助技术在普通脊柱手术中的优势。目前很少研究比较机器人辅助重度AIS 矫形术与传统术式的临床和影像学结果,这对脊柱外科医师来说可能是一个巨大的挑战。
本研究旨在探讨机器人系统在重度AIS 手术中的有效性,比较机器人与常规透视方式的螺钉置入准确性,并探讨其影像学和临床参数。本研究中,机器人组和徒手组在基线信息、术前影像学参数和螺钉数量方面没有差异,这表明两组的研究人群来自相同的AIS 队列,并使用相同的矫形手术策略。但机器人组的手术时间显著大于徒手组,这与Ghasem 等[20]、Fan 等[21]的研究结果一致。这可能与机器人的操作相对复杂有关,如安装工作面板、与术前CT 扫描相匹配等。然而,Hyun 等[22]报道,他们的前15 例机器人辅助病例与后15 例相比,每枚螺钉置入时间减少了1.5 min。本团队认为,由于学习曲线的关系,随着病例数和经验的增加,手术时间、术中出血量和输血量可能会减少。
在椎弓根螺钉置入的准确性方面,机器人组置钉准确率显著高于徒手组,这表明机器人辅助技术在影像学螺钉置入精度方面明显优于传统透视,结果与Hyun 等[22]的研究结果相似。此外,两组AIS 患者术后Cobb 角、C7PL-CSVL、SVA 均得到显著纠正,本研究26 例患者,术前平均侧凸104.3°、后凸60°,冠状面矫正率为65.8%,矢状面矫正率为64.1%。本研究获得的矫正率与Suk 等[23]、Lenke 等[24]的报道相似,两组术后这些参数无差异。这些发现表明,在重度AIS 手术中,机器人辅助和透视辅助技术都可以达到有效的影像学校正和临床结果。
本研究有一定的局限性。首先,所有26 例重度AIS 患者均来自单一中心;此外,由于缺乏更长期随访数据,以及本研究患者样本量较小,限制了进一步影像学的比较。未来需多中心、大样本的研究探索机器人辅助技术在矫治重度AIS 的准确性和安全性。
猜你喜欢
电子机械工程(2018年3期)2018-08-02
中国自行车(2018年2期)2018-05-09
福建人(2016年6期)2016-10-25
中华骨与关节外科杂志(2016年6期)2016-05-17
中华骨与关节外科杂志(2016年5期)2016-05-17
实用手外科杂志(2015年2期)2015-08-28
Coco薇(2015年7期)2015-08-13
中国医疗美容(2015年2期)2015-07-19
中国实用医药(2014年29期)2014-10-23
卫生职业教育(2014年24期)2014-03-19