基于Backstepping的六旋翼无人机自适应容错控制*
2024-04-27 12:12姚雪莲
火力与指挥控制 2024年1期
吴 凯,杨 艺,姚雪莲
(江苏理工学院汽车与交通工程学院,江苏 常州 213001)
0 引言
由于具有操作灵活、低电磁反射、低噪声、隐蔽性高、保养维修更加高效便捷等优点,多旋翼无人机已成为空天战场的重要组成部分[1-3]。当无人机在战场上执行高危任务时,执行器更容易发生不确定性故障,如今,四旋翼无人机的容错控制研究相对成熟,文献[4]采用积分反演控制方法设计基础控制器,然后利用时延控制的逼近能力来补偿执行器可能出现的不确定故障,实现了对四旋翼无人机执行器常值故障进行容错控制,具有较强的鲁棒性。文献[5-6]均采用模型参考自适应的控制方法,文献[5]结合干扰观测器和切换控制策略,解决了四旋翼无人机的外部干扰问题,但对外部条件有一定要求。文献[6]则结合滑模控制来抑制外界干扰和模型不确定性造成的影响。文献[7-10]分别采用自适应模糊滑模控制、自适应容错控制策略、基于RBF 神经网络的自适应反演控制等多种方法实现对四旋翼无人机容错控制,但其讨论的故障类型都相对单一,在实际应用中具有一定的局限性。
与四旋翼无人机相比,六旋翼无人机具有结构冗余,可靠性更高,当执行器发生故障时,可以通过自身调节使无人机仍能稳定飞行[11-12]。文献[13]提出了一种迭代修正方案,当六旋翼无人机飞行时,利用交互多模型滤波器对无人机的飞行状态进行故障诊断,在发生故障时,通过调用控制效率矩阵进行控制分配,从而实现容错控制。该方法需要额外进行故障诊断,且只考虑完全失效下的故障情况。文献[14-15]分别设计了基于滑模变结构控制和应用权重矩阵的自适应容错控制方法,这两种控制方法都能有效降低执行器失效和卡死故障对无人机飞行的影响,保证了无人机的稳定飞行与安全着陆,但都只考虑执行器失效的情况。文献[16-17]针对六旋翼无人机执行器故障均通过观测器获取故障信息,然后隔离电机故障进行容错控制,虽具有良好的鲁棒性,但加入观测器后容错控制系统过于复杂,现实中难以实现。文献[18]考虑了无人机电机卡死和失效两种故障类型,提出一种基于自适应滑模的执行器故障容错控制方法,该方法保证了六旋翼无人机在发生执行器故障时仍能稳定飞行。文献[19]采用自适应反步滑模控制方法,实现了六旋翼无人机姿态和位置控制,控制系统对扰动和参数变化都具有很强的鲁棒性。文献[20]通过状态反馈设计了一种自适应控制器,使无人机电机卡死时仍能正常悬停和推进,该算法利用线性矩阵不等式方法的框架,提高了系统的安全性和鲁棒性,虽未使用观测器,但只能用于电机卡死故障。
本文针对六旋翼无人机研究其电机发生不确定故障下的控制问题,建立了六旋翼无人机的动力学模型和故障模型,并运用反步法对六旋翼无人机系统进行基本控制。设计了故障参数自适应律对电机发生的不确定故障进行在线估计。在本文中,考虑六旋翼无人机的6个电机中至多有一个发生不确定故障,对电机在发生卡死故障和时变故障进行了研究,所设计的容错控制方法与现有的六旋翼无人机容错控制方法相比有以下特点:1)本文研究执行器常值与时变两种故障类型,且不依赖观测器进行故障诊断,降低了系统的控制难度,解决的问题更贴近实际;2)本文深入考虑六旋翼无人机电机故障情况,基于Backstepping 进行理想反馈控制信号设计,并采用自适应控制器进行故障补偿,相较于滑模控制,避免了抖震,从而保证了无人机飞行时的稳定性和安全性;3)该容错控制方法亦可推广到其他多旋翼无人机上,应用的范围更加广泛。
1 问题描述
本文是基于图1 的六旋翼无人机进行研究的。针对系统的复杂性,在建立模型之前,提出3个合理假设[18]:
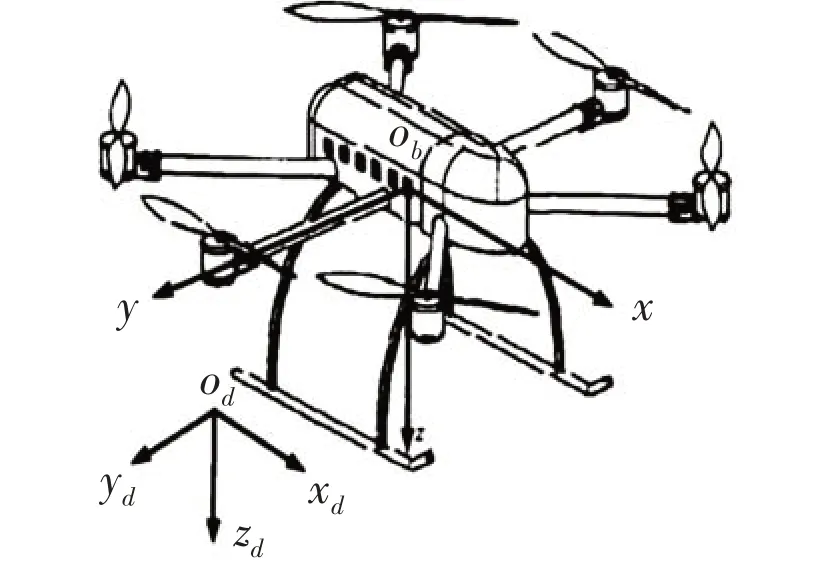
图1 地面坐标系和机体坐标系Fig.1 Coordinate systems of ground and airframe
1)对于机体坐标系,无人机重心和质心以及坐标原点重合。如图1 所示,Obxyz为无人机机体坐标系,无人机质心处于坐标原点Ob的位置。无人机机头所对方向与x轴正方向一致,z轴正方向始终与机体平面保持垂直,指向下方。对于Obx和Obz所构成的平面,y轴与所构成的平面垂直,即保证了任意两个轴所构成平面与另一个轴互相垂直。
2)无人机机体关于轴对称且为刚体。六旋翼无人机结构图可简化为,如图2所示,根据对称性可以看出1、4 号旋翼到M点距离为l2,3、6 号旋翼到N点距离为同样为l2,2、5号旋翼到中心点O的距离为l1,2、5 号旋翼到中心点O的距离为l3;在6 个旋翼上面有各个方向的箭头,代表了旋翼旋转的方向;α代表了力臂和OM延长线之间的夹角。
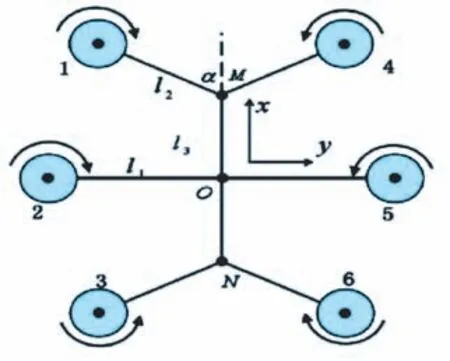
图2 六旋翼无人机简化结构图Fig.2 Simplified structural diagram of six-rotor UAV
3)无人机在飞行过程中,姿态角不会出现较大突变。
1.1 六旋翼无人机的动力学模型
考虑到六旋翼无人机的飞行和结构特点,在不考虑陀螺效应和环境因素对其的影响下,根据牛顿-欧拉方程,六旋翼无人机的运动学模型如下:
式中,γ=[φ,θ,ψ]为无人机的姿态角,φ,θ,ψ分别为滚转角、俯仰角与偏航角;ω=[p,q,r]T表示无人机的角速度,p,q,r分别表示滚转、俯仰与偏航角速度;j=diag{Jx,Jy,Jz}表示无人机三轴上的转动惯量;机体坐标系三轴角速度与欧拉角向量转换矩阵W ∈R3×3为:
根据图2,由机体结构得到矩阵L ∈R3×3为:
式中,b为升力系数;d为反扭矩系数。
u(t)为6个电机的控制输入信号,u(t)=[u1(t),u2(t),u3(t),u4(t),u5(t),u6(t)]。
无人机在产生升力过程中,各个旋翼都会影响无人机的姿态角,用S ∈R3×6来表示:
根据式(1),定义第1 个子系统状态向量x1=γ,和第2个子系统状态向量x2=ω,则式(1)可表示成:
式中,x=[x1,x2]T;f1(x1)=W;f2(x)=-J-1ω×Jω;g2(x)=J-1LS。
1.2 六旋翼无人机电机故障模型
一种实际的六旋翼无人机的电机故障模型可以表示为:
式中,tj代表了故障时间;j为故障标号为未知常数,该故障可表示卡死故障,此时电机输出为固定值;表示一类时变故障,其中,为未知故障参数,fji(t)(i=1,2,...,qj)为已知有界函数,例如正弦函数可用于模拟周期性的时变故障。
当系统发生不确定故障时,控制输入u(t)可表示为:
式中,v(t)是需要设计的自适应反馈控制信号,以补偿不确定故障对系统性能造成的影响是故障值,为故障模式。当t时刻,第m(m=1,2,...,6)个电机产生故障时,,否则=0。
2 基于Backstepping 的非线性反馈控制信号设计
本文的控制目标是至多存在一个电机故障,且故障发生时间、故障模式与故障参数均未知的情况下,为了保证闭环系统稳性以及输出y(t)的渐近跟踪期望信号ym(t),首先基于Backstepping 控制设计理想反馈控制律wd,定义,无故障时,系统输入信号u(t)∈R6满足:
wd设计步骤如下:
Step 1 引入误差变量z1=x1-ym和z2=x2-α1,其中,α1为选定的设计函数,从式(5)第1 个方程可以得出:
定义误差z1的李雅普诺夫函数函数,其导数为:
设计稳定函数为:
c1>0 为控制器设计参数,并且将式(11)代到式(9)里面运算得出:
再结合式(10)和式(11)得:
因此,当z2=0 时,可通过α1来稳定动态误差;当z2≠0时,进行下一步设计。
方程(9)与式(14)可被视为一个二阶系统,该系统可以通过α1和反馈控制信号w(t)=g2(x1,x2)u(t)来稳定。
则设计驱动信号w(t)对应的理想反馈控制信号wd(t)为:
使得:
在系统无故障或故障信息已知情况下,结合式(7),系统的控制输入可表示为:
其中,v*(t)为理想的故障补偿控制器。则式(8)可表示为:
当发生不确定故障时,故障参数是未知的,因此无法得到v*(t),驱动信号w(t)不等于理想的反馈控制信号wd(t),此时基于Backstepping 设计的动态误差方程式(14)可改写为:
3 自适应故障补偿控制器设计
3.1 理想执行器故障补偿控制器设计
1)当无故障发生时,对所有时刻t≥0都有v(t)=v(t),由式(8)可知g2(x1,x2)v(t)=wd,由于g2(x1,x2)∈R3×6,无法通过求逆得到v(t),设计控制率v(t)为:
式中,K21(x1,x2)=(g2(x1,x2)h21(x1,x2))-1,选取的h21(x1,x2)∈R6×3非唯一且使得g2(x1,x2)h21(x1,x2)非奇异,故K21(x1,x2)也非唯一,当K21选定时,与均已知。
控制率v(t)设计为:
其中,h22(x1,x2)∈R5×5使得g2(2)(x1,x2)h22(x1,x2)非奇异,结合式(23)与式(24)通过求解:
计算可得:
当h22(x1,x2)选定时,通过求解式(25)可以确定K22与K221,进而可以通过式(24)与式(26)确定与。
3)当系统6 号电机故障时,u6=ū6,ui=vi(i=1,2,...,5),g2=[g21,g22,...,g26]∈R3×6,令g2=[g2(1),g26],g2(1)=[g21,...,g25]∈R3×5,v=[v1,v2...,v6]T=[v),v6]T∈R6,v6=0,va(3)=[v1,...,v5]T∈R5,则式(8)可表示成:
控制率v(t)设计为:
其 中,h23(x1,x2)∈R5×5使 得非 奇异,结合式(27)与式(28)通过求解:
计算可得:
当h23(x1,x2)选定时,通过求解式(29)可以确定K23与K236,进而可以通过式(28)与式(30)确定与。
则综合控制器可表示为:
对于综合控制器式(31),当v(t)=v*(t) 时,控制信号w(t)=wd(t),从而获得期望的系统性能。
3.2 自适应执行器故障补偿器设计
当系统电机发生不确定故障时,故障参数(i=1,2,3)和(t)均未知,实际情况下无法得到理想的故障补偿控制器v*(t),为了解决故障的不确定性,建立如下自适应故障补偿控制算法:
根据式(31)可得自适应控制器的结构为:
结合式(40)~式(42)可得:
则:
其中:
定义:
为了保证设计参数的有界性,参数信息用含有投影算法的自适应算法设计,则设计参数的自适应律如下:
其中,Γ1i>0与Γ6i>0为自适应增益矩阵,γ2i>0与γ3i>0为自适应增益。
其中,η1i(j1)和hη1i(j1)分别为η1i和hη1i的第j1个分量,j1=0,1,...,q1,η6i(j1)和hη6i(j1)分别为η6i和hη6i的第j6个分量,j6=0,1,...,q6。
其他电机发生不确定故障情况下的自适应设计过程与u1和u6故障情况下的自适应补偿控制算法相似。
3.3 性能分析
1)当无故障发生时,即σ(t)=diag{0,0,...,0},定义正定方程:
对V0求导得:
2)当u1发生故障时,即σ(t)=diag{1,0,...,0},定义正定方程:
对V1求导得:
3)当u6发生故障时,即σ(t)=diag{0,0,...,1},定义正定方程:
对V2求导得:
针对可能发生不确定执行器故障的非线性系统式(1),在系统至多发生一个执行器故障,且故障值、故障发生时间和故障模式均未知的情况下,通过采用基于Backstepping 所设计的反馈控制律式(43)和所设计的自适应律式(49)~式(53),能够保证闭环系统稳定且其系统输出渐近跟踪给定指令。
4 仿真研究
在本文的仿真中,对于六旋翼无人机的3 种故障模式对应的故障情况如下:
1)无故障发生,所有电机均正常工作:ui=vi(i=1,…,6),t<10 s;
2)1号电机发生卡死故障,其他电机均正常:u1=2.5 N·m,ui=vi(i=2,…,6),10 s≤t≤25 s;
3)1号电机恢复正常工作,无故障:
ui=vi(i=1,…,6),25 s<t≤40 s;
4)6号电机发生时变故障,其他电机均正常:u6=2sin(t)N·m,ui=vi(i=1,…,5),t>40 s。
六旋翼无人机的数学模型参数如下[18]:
J=diag{0.019,0.019,0.031};b=3.13*10-5;d=7.5*10-7;l1=0.285 1 m;l2=0.287 6 m;l3=0.048 07 m;m=1.7 kg;α=0.25πrad。
六旋翼无人机容错控制器参数如下:
c1=1.2;c2=4.8;W1(t)=W6(t)=[1,sin(t)]T;γ1i=10,i=1,2,…,6;γ2i=10,γ3i=10,i=1,2,…,5;Γ1i=48Iq1+1,Γ6i=48Iq6+1,i=1,2,…,5;y0=[0.56,0.43,-0.88]T;ym=[2,-1.5,1.36]T。
姿态角变化仿真结果如下页图3~图5 所示,以图3 为例进行说明,当t∈(0 s,10 s),系统属于无故障模式,可以看出姿态角位置在较短时间内收敛到期望值,在基于Backstepping 设计的基础控制器中参数c1起到明显作用,c1越大系统输出收敛速度就越快,反之则收敛越慢,但c1过大时导致震荡,无法稳定跟踪期望值。当t∈[10 s,25 s),σ(t)=σ1(t)(u1故障),t∈[25 s,40 s),σ(t)=σ0(t)(无故障)和t∈[40 s,60 s),σ(t)=σ6(t)(u6故障)时,结合下页图6 可以看出,由于系统状态发生突变导致出现较大的控制器参数估计误差,但在自适应控制的作用下,随着时间的增加控制器参数估计误差会逐渐减小,从图中也可以看出在第10 s,25 s 和40 s 滚转角发生了瞬态变化,但能够很快跟踪到期望值。在无故障发生时,所有无故障电机重新分配转动力矩保证无人机姿态跟踪系统的稳定性;当发生故障后,其对应的无故障电机对故障电机进行故障补偿,以满足发生故障时系统的动态性能,如图7 所示。通过反复仿真调试表明,对于自适应控制和估计,自适应增益γ1i、γ2i与γ3i过小时系统输出误差无法收敛至0,而过大则会导致震荡;自适应增益矩阵Γ1i与Γ6i越大时,在系统状态发生突变情况下的系统输出的突变值就越小,反之突变值就越大。因此,需要折衷选择控制器参数以满足期望的控制性能。
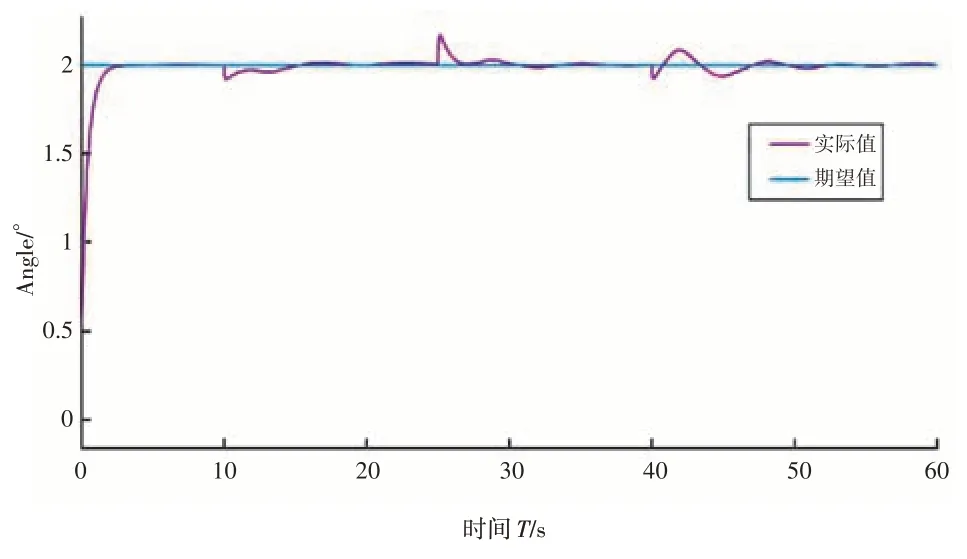
图3 滚转角φ实际值与期望值Fig.3 The actual and expected values of roll angle φ
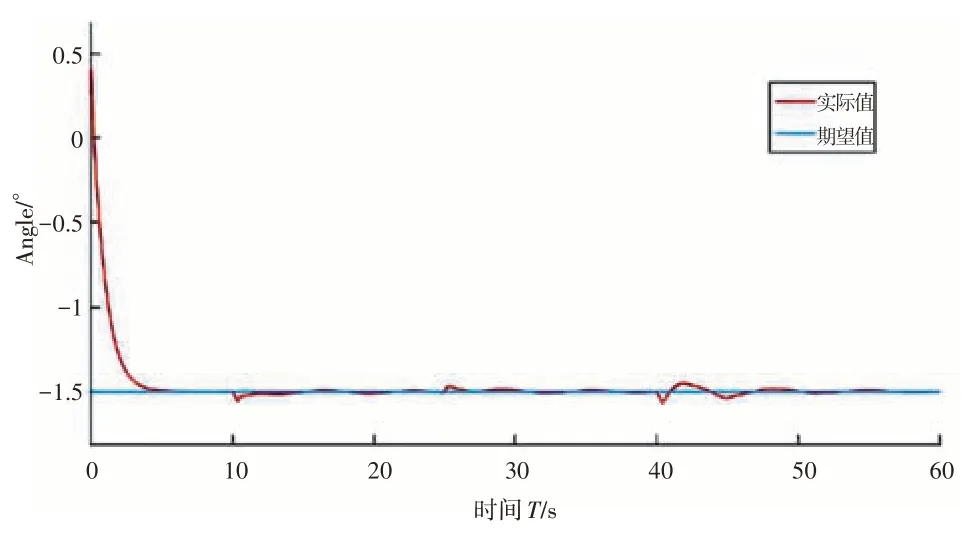
图4 俯仰角θ实际值与期望值Fig.4 The actual and expected values of pitch angle θ
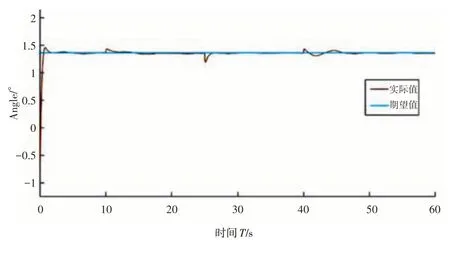
图5 偏航角ψ实际值与期望值Fig.5 The actual and expected values of yaw angle ψ
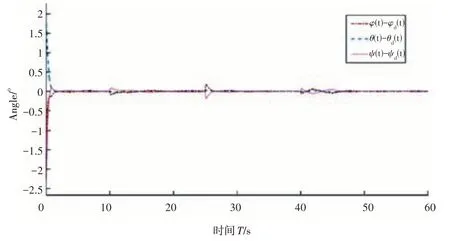
图6 跟踪误差y(t)-ym(t)Fig.6 Tracking error y(t)-ym(t)
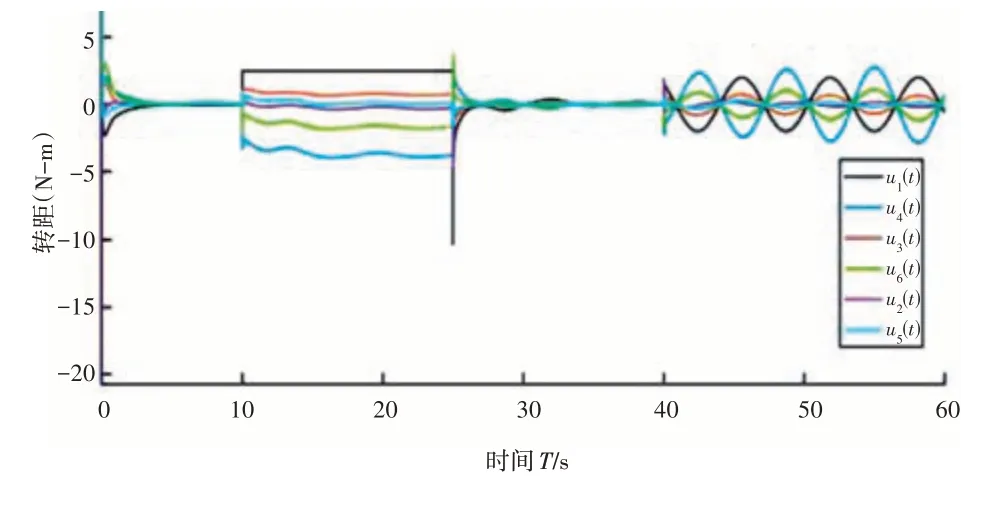
图7 系统控制输入曲线Fig.7 System control input curve
通过上述仿真结果及分析可以看出,所设计的Backstepping 自适应容错控制器能快速处理不确定故障对无人机系统带来的影响,保证了期望的输出跟踪性能,实现了容错控制目标。
5 结论
本文针对六旋翼无人机电机发生不确定故障问题,设计了一种基于Backstepping 的自适应故障补偿方法。通过建立能统一描述电机常值故障与时变故障的数学模型,降低了对不同故障类型进行差别处理的复杂度。在基于Backstepping 的自适应故障补偿控制器中,设计了对故障参数与故障指示函数进行在线估计的自适应律,不用额外设计观测器,而传统的故障容错方法需要先进行故障的识别,然后设计观测器,因此,提高了整个容错控制系统的设计复杂度。
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
军民两用技术与产品(2021年9期)2021-03-09
电子制作(2019年9期)2019-05-30
测控技术(2018年12期)2018-11-25
制造技术与机床(2017年9期)2017-11-27
北京航空航天大学学报(2016年8期)2016-11-16
自动化学报(2016年8期)2016-04-16
自动化学报(2016年5期)2016-04-16
铁道科学与工程学报(2015年5期)2015-12-24
深空探测学报(2015年3期)2015-12-07