
潜艇动力平台训练仿真系统总体设计与实践
2012-11-12 08:03曾凡明陈于涛胡锦晖
中国舰船研究 2012年6期
曾凡明 陈于涛 胡锦晖
海军工程大学船舶与动力学院,湖北武汉 430033
0 引 言
随着舰船装备技术的发展,舰(潜)艇动力平台集成了越来越多的设备和子系统,其自动化程度越来越高,操作管理的复杂性和难度不断增加。平台系统只有通过训练有素的人员的正确使用,才能发挥出应有的作战效能。然而,高水平的使用管理人员需要一个较长的持续训练过程,由于舰艇使用管理人员具有定期的流动性,因此,如何保持和提高人员的训练质量和训练水平,是一个迫切需要解决的重要问题[1-2]。在这些需求的带动下,采用计算机仿真技术进行舰艇动力平台系统的操纵训练,逐渐成为人们的共识,并受到世界各国海军的重视。
1 训练仿真系统研究概况
目前,各国海军使用的训练方式及手段主要有:岸基训练(Shore Based Trainer,简称 SBT),或称作陆基训练(Land Based Trainer,简称LBT);实船训练系统(On-Board Training System,简称OBTS);最终的实船海上训练[3-6]。
实船海上训练效果好,作用不可替代,但在训练组织、航行保障等方面需要大量的准备工作以及后勤支持,人力、物力消耗较大,同时受环境因素的影响也较大,而且也无法模拟一些复杂的情景,如复杂报警显示、设备与系统的严重故障等。因此,作为海上训练的有益补充,发展了许多辅助训练的技术手段。
仿真系统训练是应用效果较好的一种训练方式,它可用于过程训练、维护训练以及管理训练,此外,仿真系统还可用于平台系统的设计与开发研究。仿真系统训练的优点在于:可以在训练真实性与训练耗费之间取得一个折中点,在保证足够的训练真实性条件下大大降低训练耗费;可以提高训练的复杂性、自由度以及安全性,加强了训练的价值;可以通过教练台操作记录对训练效果进行评估。
训练仿真系统可以分为两大类:岸基训练仿真系统和实船嵌入式训练仿真系统。
岸基训练仿真系统(SBTS)是发展最完善的训练手段之一。例如,英国海军在20世纪70~80年代为其主要的驱护舰型都建立了相应的岸基训练仿真系统,为每一种舰型都提供了仿真训练环境,但其主要问题就是初建费用与维护费用较高。为解决这一问题,采用的主要方法有:扩大模型的仿真范围,将控制系统也纳入仿真;在一套通用模拟器中存入多种舰型的仿真模型,提高训练仿真系统的通用性等。
实船训练仿真(On-Board Training Simulation)技术[7]集成了岸基模拟训练系统与海上舰船实践环境两者的优点,通过运用仿真技术,使舰船实际装备同时具备模拟训练功能,为使用管理人员提供了一个基于实装的综合训练环境。实船训练系统(OBTS)即由此发展而来。
在舰船动力平台训练仿真系统的研发方面,国外比较著名的岸基训练仿真系统生产厂家及产品有:挪威KMSS公司的PPT2000系列轮机训练仿真系统;英国Transas公司的ERS2000、ERS3000、ERS Solo等系列轮机训练仿真系统;德国STN公司的SES4000系列轮机训练仿真系统;德国Rheinmetall Defense公司于2009年推出其最新的212A型潜艇模拟器[8];英国雷迪风公司为英国皇家海军研制了以“特拉法尔加”级攻击核潜艇为训练对象的潜艇操纵训练设备[9];美国海军三叉戟海军训练基地配备了各型主要潜艇的训练模拟器。要特别指出的是,在各船舶自动化公司的集成平台管理系统(IPMS)产品中,一般都集成了以实船人机界面为训练接口的实船训练系统(OBTS)。比较著名的生产厂家有L-3 MAPPS,SIEMENS,ALSTON,ABB等。不论是岸基轮机训练仿真系统还是实船训练系统,其核心内容都是动力装置系统的实时性能仿真。
国内具有代表性的岸基轮机训练仿真系统研制单位和产品有:大连海事大学的新型轮机模拟器系统DMS-2000,DMS-2005及DMS-2010;上海海事大学的SMSC-2000,SMSC-2006;武汉理工大学的WMS2000等;海军工程大学以军用舰艇为对象,研制出了多型训练仿真系统并投入使用。在实船训练系统(OBTS)方面,我国的研究与开发刚刚起步,还没有成功应用的例子。
2 训练仿真系统总体设计
在舰船动力平台训练仿真系统的总体设计中,需要解决的主要问题有:
1)训练仿真系统功能设计;
2)训练仿真系统体系结构设计;
3)训练仿真系统模块化模型库设计。
2.1 系统功能设计
在训练仿真系统的设计过程中,首先需要确定仿真系统的功能需求,然后选择相应的系统体系结构,包括仿真范围以及软、硬件组成等。
训练仿真系统的功能包括基本功能和扩展功能两个层次:基本功能主要面向初级使用管理人员,包括操作训练、应急处理、控制流程训练和管理过程优化;扩展功能主要面向高级使用管理人员,包括装备保障、装备维修、控制参数和控制策略优化等方面。在系统设计的第一阶段,需要根据系统的训练需求来确定系统应具备的功能,然后设计相应的系统体系结构。
2.2 系统体系结构设计
从构成上看,舰船动力装置及其监控系统主要包含3个层次的内容:
1)人机界面层:包括各控制台硬件和计算机人机界面。以计算机计算和显示终端为核心的多功能操作站是动力系统控制台硬件的发展趋势。
2)传感器、控制器层:包括各种温度、压力、位移等传感器网络和实现各种控制功能的控制器网络。
3)装置对象层,包括主机、推进轴系、传动装置、推进器等推进系统部件及相关的动力辅助系统。
相应地,推进装置训练仿真系统的构成也主要包含3个层次,分别实现对动力装置系统3个层次的模拟与仿真,以及对整个系统的运行管理。其中,动力装置实时性能仿真是整个训练仿真系统的核心层次。
传感器、控制器层通常可以采用3种实现形式:全范围仿真、全激励仿真和部分激励仿真。
全范围仿真是使用最多的仿真方式,其采用软、硬件替代的方法,仿真动力装置系统的传感器、控制器层。控制系统硬件采用COST硬件替代的方式,控制软件按照控制系统的外部可见功能重新开发,将所有的控制功能统一集中在仿真支撑软件中。
全激励式仿真是分散式仿真的一种,该方式是保留原有的分散控制系统软件和硬件。激励方式涉及激励系统至仿真计算机的接口,两个计算机系统之间的硬件接口可由高速并行数据接口、高速异步接口、通路或定做的接口实现。但两台计算机之间的通信及同步软件必须由用户提供。此外,激励软件须加以修改以适应仿真机冻结/运行、快/慢速、回退/重演、初始条件装/存等运行方式。激励方式保留了分散控制系统的全部功能,可以在仿真机上方便地进行控制算法分析研究及改进工作,激励软件和硬件能很容易做到与实际监控系统始终保持一致,监控系统备用硬件可用于仿真机。
部分激励方式是在全激励方式上发展出来的一种新型仿真方式,采用实际控制系统的软件和硬件复制人机界面,其实际功能(如控制回路)由仿真计算机实现。部分激励方式结合了仿真和激励两种方式的优点,容易适应仿真机的运行方式,具有很高的逼真度,其软、硬件维护费用最低。
人机界面层可以有3种实现形式,即硬件模拟人机界面、软件模拟人机界面,以及实装人机界面。其中硬件模拟人机界面是最常见的形式,其采用硬件替代的方法进行外形和功能模拟,既降低了开发成本,同时又保留了足够的操作沉浸感和真实感。为了增加单次训练人员的数量和开发时间,缩减系统规模,可以采用软件模拟人机界面,即将实装控制盘台人机界面以计算机虚拟界面的形式替代。为了使仿真训练系统具备一定的实装教学和保障功能,可采用实装人机界面的形式,采用与实际控制台完全一致的软、硬件和数据接口,可以对实装人机界面的特性和装备保障进行深入研究。
在动力平台训练仿真系统体系结构的设计中,要充分考虑系统需要实现的功能范围,选择各个系统层次的实现方式,最终确定整个训练仿真系统的整体体系结构。
2.3 实时性能仿真要求与模型库设计
2.3.1 实时性能仿真要求
动力装置性能仿真系统运行的实时性要求主要体现在4个方面:
1)仿真模型的实时性(妥善处理模型复杂性与计算快速性之间的矛盾);
2)仿真计算的实时性(计算机硬件资源CPU、内存的合理分配与使用,即操作系统的实时性、算法的实时快速性、仿真代码的编写质量等);
3)通信的实时性(软件之间、硬件之间、软硬件接口之间的实时通信);
4)计算机硬件的计算能力。
实时性能仿真必须从实际系统仿真模型建立时就开始考虑其模型精度和计算实时性的需求。实时仿真程序的运行时间取决于:源代码、编译器、计算机的体系结构和操作系统4个方面的共同作用。影响系统实时性的主要因素有两个:一是仿真模型过于复杂以至于计算机系统不能在给定的采样时间内完成仿真计算;二是由于操作系统对计算机资源的调用存在不可预知性,出现程序运行过慢甚至被阻塞,以至于不能满足时限要求。
因此,在开发实时性能仿真系统时,要充分考虑这两方面的约束:提高模型的代码效率,将模型复杂性限制在可以接受的范围内,并采用一种将操作系统有疑问的特性应用到最小的应用程序软件体系,以达到对计算资源充分的可预知性。
2.3.2 模型库设计
建立成熟的模型库是实现模型重用,降低开发风险与耗费的较好方法[10-13]。
动力装置的建模与仿真过程实际上是根据应用需要,确定合适的模型深度和建模体系。由于装置本身的复杂性,在确定模型体系时,可以采用系统分解的分析方法,构成具有模块化结构的系统数学模型。根据动力装置的结构特点,采用面向对象的模块划分方法,按照物理设备或部件逐层分解、划分模块。每个模块包含输入变量、输出变量、模块系数和故障系数,当模块需要修改时,只需修改它的系数,整体模型通过不同模块的组合搭建,可以快速调整。
3 训练仿真系统总体设计实例
图1所示为一种采用电力推进方式的潜艇动力平台系统典型的构成形式:包括柴油发电机组、推进电机、蓄电池组、推进轴系、螺旋桨、辅助机械以及其它辅助控制系统等。其中,推进电机分为主推进电机、经航推进电机和辅推电机等;辅助机械包括各类油泵、水泵、通风机、液压机构及空气压缩机等;辅助控制系统则包含潜艇操纵系统和全艇集中控制系统等。

图1 潜艇动力平台系统典型构成Fig.1 Typical components of submarine power system
3.1 动力平台仿真系统总体结构设计
根据图1所示动力系统的构成特点,建立如图2所示的训练仿真系统总体结构:仿真平台总体上采用半物理仿真的方法,即动力系统中各组成部分的操控台、操作开关、按钮、仪表和指示灯等元器件与实船部件基本相同,操作方法完全相同,各被控对象包括柴油发电机组、蓄电池组、主推进电机、经航电机、辅推电机及辅助机械等,采用计算机仿真模型进行模拟。整个仿真系统的硬件上包括动力操控台系统(人机界面)、计算机仿真系统、网络及接口系统,以及舱室环境仿真系统等。通信网络是整个系统的基础,所有的终端和人机界面软、硬件都连接到该网络上,整个系统具有分布式的结构,每个节点可以共享信息和数据,被设计成开放式的网络,可以通过标准通信协议连接实际设备。可编程逻辑控制器(PLC)接口系统主要有两个作用:一是对模拟控制台信号的采集和驱动,一些简单的逻辑可通过梯形图的形式写入PLC中以保证操作响应的实时性;二是连接实际的控制器,以作为实际控制器与仿真系统数据交互的接口。PLC终端的I/O数据通过以太网通信网络集成到I/O服务器,其它服务器终端的I/O数据也同时集成到I/O服务器。如果所构建的仿真平台还需要与其它仿真系统(如雷达、声呐、通信、指挥控制及综合导航等)进行联网,以实现与更大规模的仿真系统的互联互通,就需设计动力系统仿真平台的HLA接口系统,以使之成为HLA总线上的一个成员。
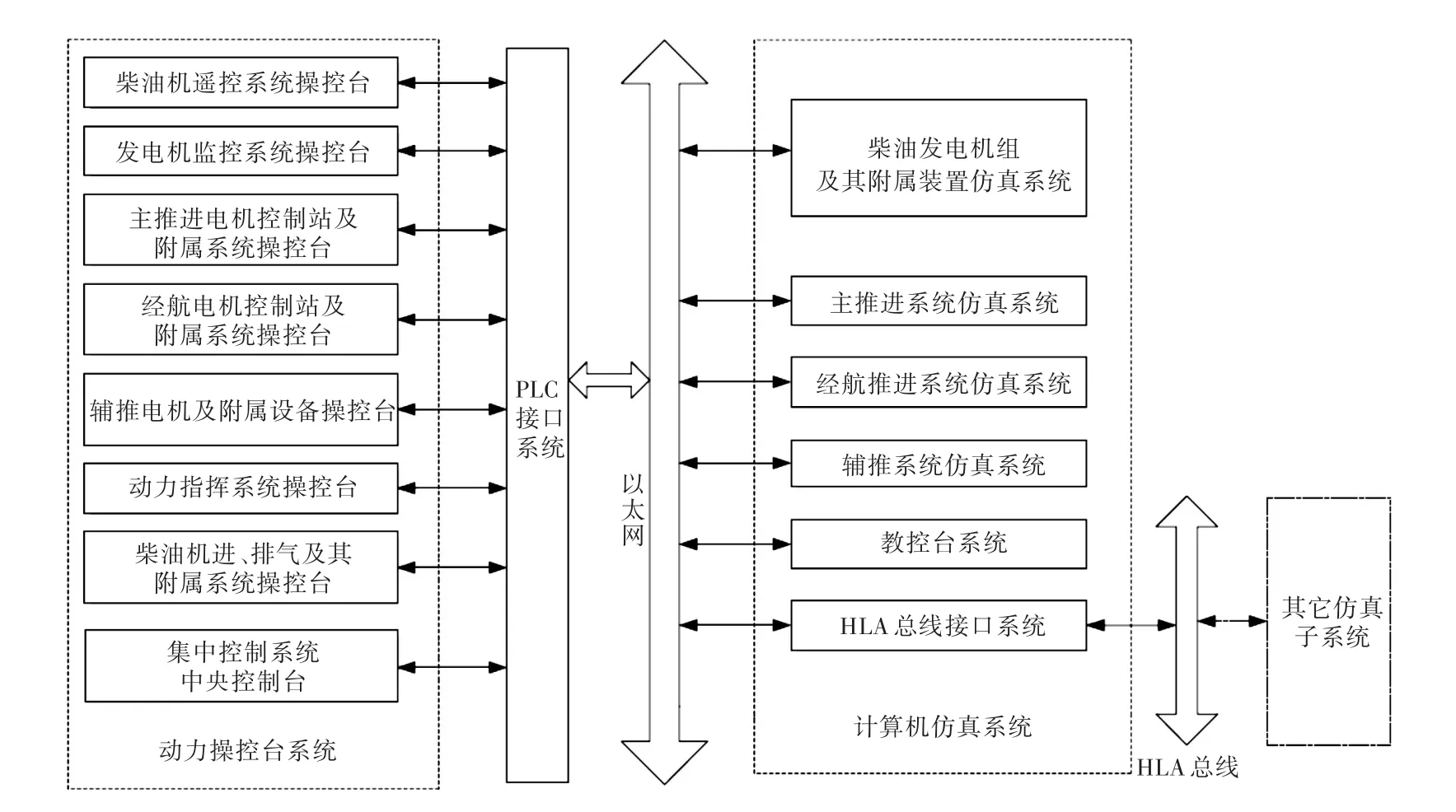
图2 训练仿真系统总体结构Fig.2 System structure of training simulation system
3.2 软件系统设计
软件系统分为3个层次:下层数据层、中间核心层、上层教练层。软件系统的总体原理结构框图如图3所示。
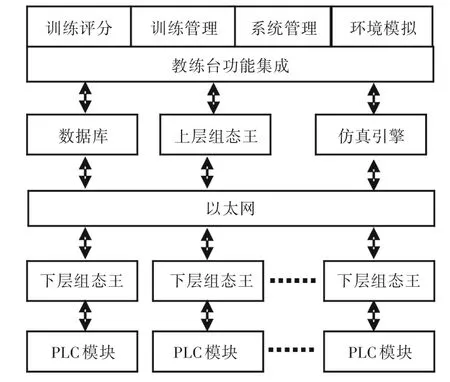
图3 软件系统原理框图Fig.3 The principle diagram of software system
下层数据层包括分布式的下层组态王数据采集/驱动模块和PLC模块。其中PLC模块负责采集和驱动硬件盘台的信号;下层组态王用于与PLC直接通信,通过数据转换的方式将各自对应PLC的信号转换为标准以太网数据,并连接到核心层的公用以太网,与网上其它模块进行通信。
中间核心层包括数据库、上层组态王和Simu-Works仿真引擎。其中数据库负责记录所有的系统运行数据和人员操作数据,为教练台的功能集成提供数据支撑。上层组态王是整个训练仿真系统的中心,主要通过网络管理整个平台的运行:一方面,它通过以太网与下层组态王通信,将整个训练仿真平台的数据集成到一起;另一方面,它通过OPC的方式与SimuWorks仿真引擎交换数据,实现训练仿真,此外,它还将运行数据通过网络存入数据库中。SimuWorks仿真引擎是训练仿真系统的核心模块,负责提供计算环境,加载性能计算模型,实现实时性能计算。
整个训练仿真系统通过上层教练层实现人机交互和教练台功能集成。上层教练层功能主要包括系统管理、训练管理、训练评分,以及机舱环境模拟。其中系统管理包括训练仿真系统的用户登录和权限管理;训练管理包括训练工况设置、运行、冻结、回溯、重演、故障的投入与撤出等方面;训练评分系统根据数据库中存储的运行数据和人员操作数据,按照训练科目的具体要求对人员操作情况进行评价,打分的标准包括操作结果的正确性、操作顺序的正确性及操作时间等因素。此外,为了在训练过程中增加训练的真实感,在训练仿真系统中对机舱声环境进行了模拟,包括对各种电机、柴油机、通风机、泵、阀门,以及进、排气挡板等设备运行声音的模拟。
在软件系统设计中,动力系统的实时性能仿真是关键,必须重点考虑以下几个方面的问题:
1)模块化建模体系的构建
根据所研究动力系统的特点,可将整个系统划分为众多子系统,通过对子系统的分析,可将模块分为两部分:逻辑控制模块化建模体系和被控对象模块化建模体系。
逻辑控制模块主要用于实现在动力系统的操作使用中存在的大量控制、自动保护及报警等逻辑过程的功能,如图4所示。
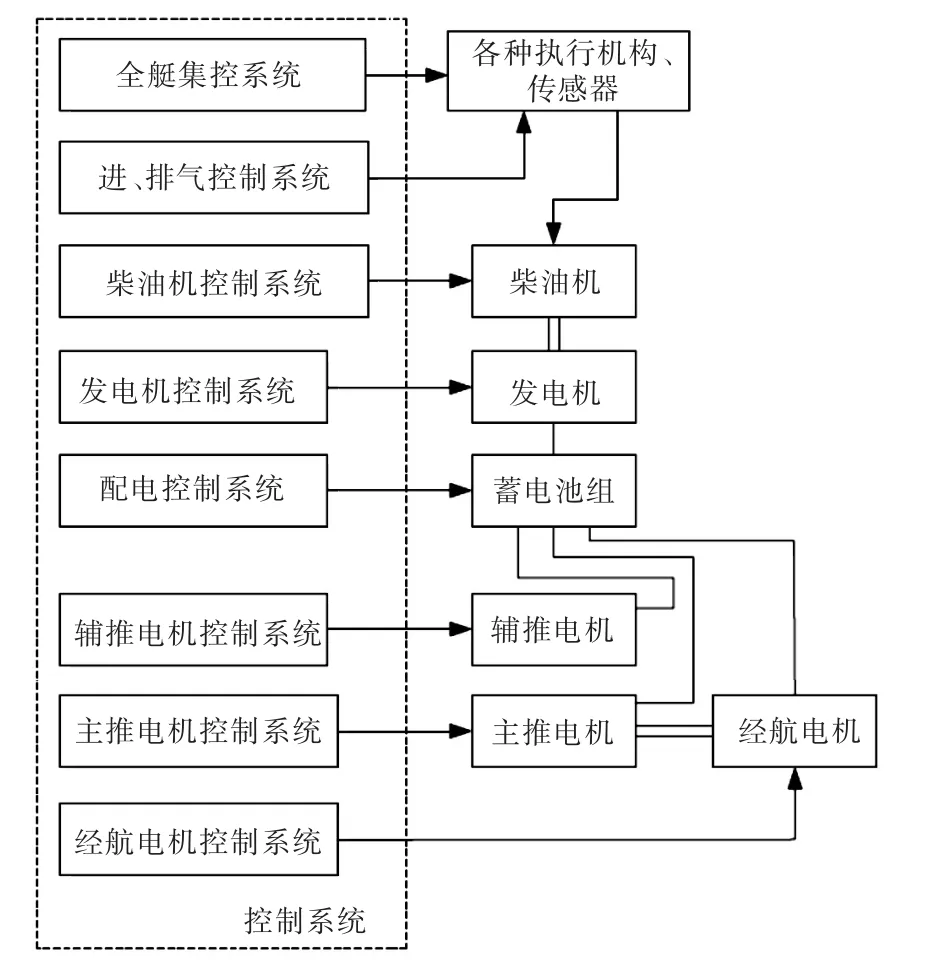
图4 控制系统结构Fig.4 Control system structure
被控对象模块包括设备模块及子系统模块。由于动力系统本身的复杂性,在确定模型体系时,应进行合理的模块化分解,在分解过程中应保证模块间的物理独立性和数学独立性。
图5与图6所示分别为主推进系统及辅推进系统模块化分解方案。根据建模需要,有些设备模块还应继续分解为若干相对简单的部件或环节(图7所示为根据柴油机的结构特点进行进一步模块分解的实例),利用相应的理论知识分别建立各子系统或环节的数学模型,然后将相应的子模型进行综合(图8所示为艇体和螺旋桨模块的综合示例)。
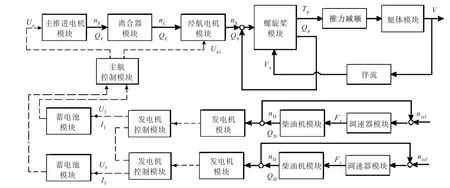
图5 主推进系统模块化建模结构Fig.5 Modular structure for main propulsion system
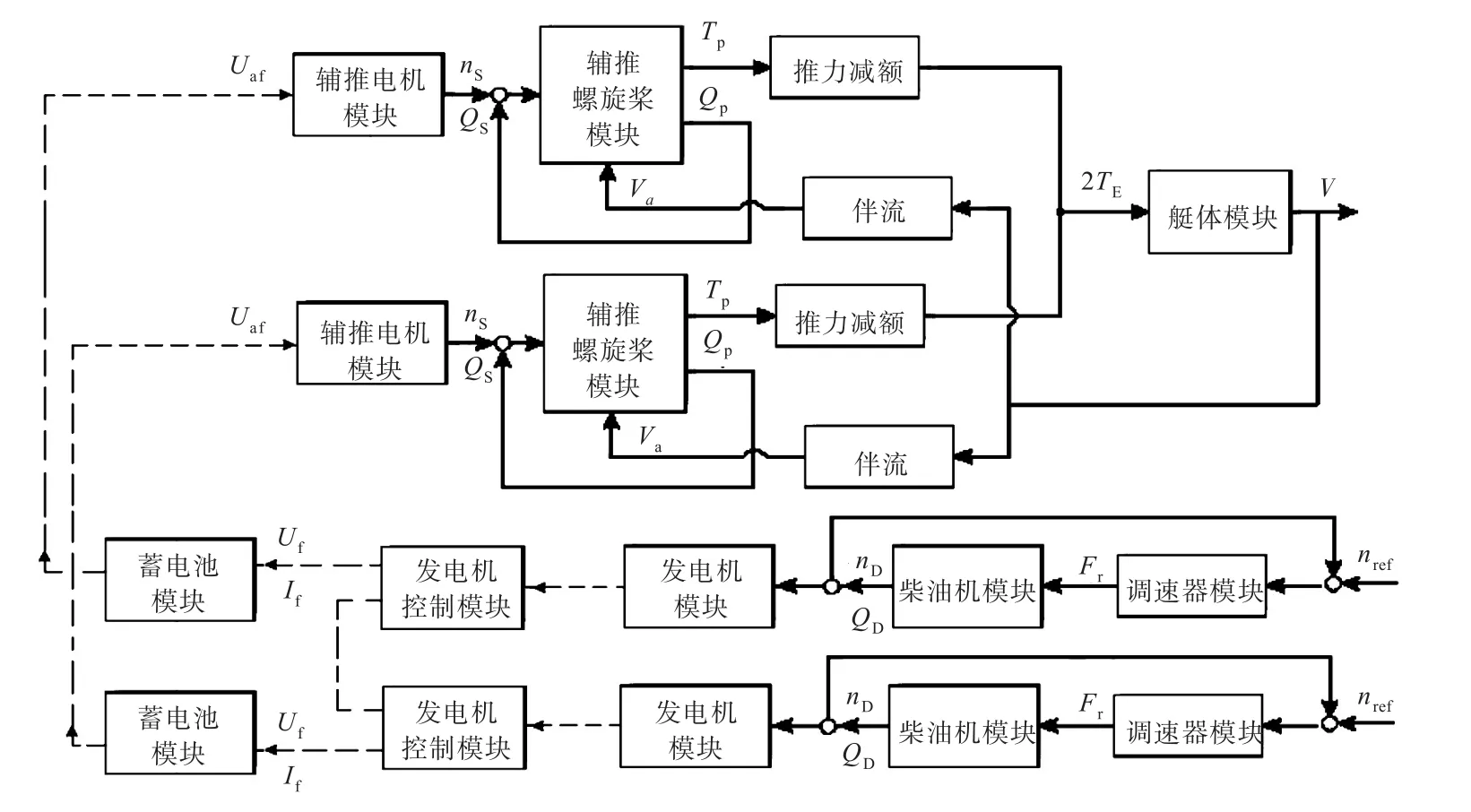
图6 辅推进系统模块化建模结构Fig.6 Modular structure for auxiliary propulsion system

图7 柴油机模块分解Fig.7 Model decomposing of diesel engine
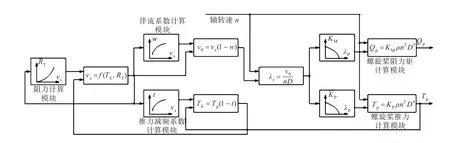
图8 艇体模块与螺旋桨模块的综合Fig.8 Integration of hull and propeller models
2)模型的精度与实时性
根据各子系统或子模块在整个系统中的地位与作用不同,所需仿真模型的精度要求也不尽相同的特点,采用不同的建模方法,以保证在精度要求范围内满足仿真的快速性和有效性,使整体模型的计算实时性满足应用要求。例如,对于柴油机,由于其结构复杂,可依据图7所示进行进一步的模块分解后分别建模;对于直流推进电机,可采用如图9所示的框图进行仿真计算;而对于辅助机械,在不同的工况下辅助设备的工作状态各不相同,可采用的简单的处理方法是在已知电网电压的情况下,由辅机功率确定辅机耗电电流,将其并入总网路参与仿真计算。
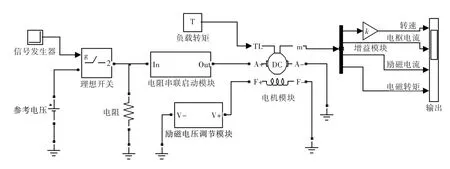
图9 直流推进电机仿真计算框图Fig.9 Simulation diagram for DC propulsion motor
3.3 硬件接口系统设计
接口系统用于实现硬件台屏元件与仿真计算机之间的信息交互。接口系统的设计通常可有两种方案供选择:
1)采用工业控制计算机以及相应的硬件接口。此种方案的优点是成本较低、选型方便快捷、开发调试方便。但由于这种接口系统依赖于WINDOWS操作系统运行,可靠性不高。
2)采用PLC作为接口。此种方案的优点是可靠性高、开发调试方便、易于维护,但成本稍高。最新推出的PLC可以连接以太网模块,便于构成接口系统网络,如OMRON CJ系列PLC:具有以太网接口,采用模块化结构,分为电源模块、CPU模块、以太网接口模块、数字量输出模块、数字量输入模块、模拟量输出模块、模拟量输入模块及脉冲输入/输出模块等。接口系统结构设计如图10所示。

图10 采用PLC的接口系统结构Fig.10 Structure of the interface system
在动力平台系统训练仿真系统的开发过程中使用了并行工程的方法,每个部分独立开发,联合调试,缩短了研制周期,提高了效率。
4 结 语
在舰船推进装置训练仿真系统的设计中,需要确定的问题主要包括系统功能定位、总体结构设计、软/硬件系统设计以及实时性能仿真模型库的建立等。本文结合作者近年来研制训练模拟器的经验,通过实例研究,对上述关键技术问题进行了总结,以期为舰船平台训练仿真系统的设计与研究水平的提高奠定良好的基础。
[1]程刚,倪何,曾涛,等.基于支撑平台的船舶动力模拟训练系统研制[J].系统仿真学报,2009,21(23):7460-7463.CHENG G,NI H,ZENG T,et al.Development of virtual training system for ship’s propulsion plant based on simulation support software[J].Journal of System Simulation,2009,21(23):7460-7463.
[2]王晓雯.集散控制手自动操作站的仿真[J].电力学报,2007,22(3):356-358.WANG X W.The imitation of manual acting and automatic operation station with concentrated and dispersive controlling[J].Journal of Electric Power,2007,22(3):356-358.
[3]FONG K Q,HODHOD A,SAKAMOTO D,et al.Integrated machinery control system operator training tools for the Canadian Navy[C]//11th Ship Control Systems Symposium.Southampton,UK,1997:357-371.
[4]ROZMYSLOWSKI J,KUCHARZEWSKI H G,BURG J.Simulation programmes for computer based training frigate 124(SIM/CBT F124)[C]//The Sixth International Naval Engineering Conference and Exhibition.UK,2002:295-304.
[5]CORNATON F.Training simulator for la Fayette class frigate[C]//11th Ship Control System Symposium.Southampton,UK,1997:403-416.
[6]SMIERZCHALSKIR.Simulation system for marine engine control room[C]//International Biennial Baltic Electronics Conference. Tallinn,Estonia,2008:978-983.
[7]COOLEY J.Shipboard equipment turns into trainers with simulation technology[EB/OL].(2007-08-03)[2008-09-05].http://www.Tsjonline.com/Simulating stuff.htm.
[8]Training and simulation systems-command teamtrainers AWU 206[EB/OL].(2009-05-21)[2010-06-15].http://www.eisc.com.cn/webdata/data.asp? nRecno=55112&recno=8002&kw=[Radar].
[9]刘亮显.英国海军的模拟训练平台[J].现代军事,2008,11(6):56-59.LIU L X.Navy training simulated platform in UK[J].Modern Military,2008,11(6):56-59.
[10]KLUJ S.The modular architecture of the engine room simulator[C]//17th IASTED International Conference on Modeling and Simulation.Montreal,Canada,2006:348-353.
[11]APSLEY J,GONZALEZ A,BARNES M,et al.Propulsion drive models for full electric marine propulsion systems[J].IEEE Transactions on Industry Applications,2009,45(2):676-684.
[12]CASTELLAN S,MENIS R,PIGANI M,et al.Modelling and simulation of electric propulsion systems for all-electric cruise liners[C]//Electric Ship Technologies Symposium.Arlington,VA,2007:60-64.
[13]陈虞涛,曾凡明,丁东东,等.相继增压柴油机推进装置增压系统特性研究[J].海军工程大学学报,2005,17(5):100-103.CHEN Y T,ZENG F M,DING D D,et al.On characteristics of diesel propulsion plant with sequential turbocharging system[J].Journal of Naval University of Engineering,2005,17(5):100-103.
猜你喜欢
导航定位学报(2022年4期)2022-08-15
成都信息工程大学学报(2022年3期)2022-07-21
中学生数理化(高中版.高考理化)(2022年5期)2022-06-01
电子乐园·下旬刊(2021年3期)2021-02-08
中学生数理化·七年级数学人教版(2020年10期)2020-11-26
汽车文摘(2019年3期)2019-03-04
电子技术与软件工程(2017年19期)2017-11-09
汽车导报(2017年5期)2017-08-03
中学生数理化·高二版(2016年4期)2016-05-14
科技视界(2014年20期)2014-08-21
