
舰载火箭弹弹道重构与模型验证
2012-11-12 08:04丁传炳胡一峰
中国舰船研究 2012年6期
丁传炳 胡一峰 陶 勇
中国舰船研究设计中心,上海 201108
0 引 言
为了提高火力系统的设计和估计精度,根据试验飞行数据,应用各种统计滤波方法重构火力系统的飞行状态,可以更精确地校订系统的仿真模型。文献[1-2]将扩展卡尔曼滤波(EKF)应用到了炮弹质点弹道模型的参数估计中,得到了较好的估计效果。但扩展卡尔曼滤波在对非线性函数进行线性化的过程中,需要对高阶项采用忽略和逼近的措施,而这样势必存在高阶项截断误差,使得滤波算法不稳定。另外,扩展卡尔曼滤波需要计算Jacobin矩阵,其求解计算量较大,特别是对于六自由度的弹道模型,Jacobin矩阵的计算更是复杂。而采用无迹卡尔曼滤波(UKF)算法直接应用于非线性系统则避免了引入线性化的误差,从而可提高滤波精度,而且算法也较易实现。
运用仿真手段来考核武器的性能,其前提条件是要对仿真模型进行验证。仿真模型验证[3-4]是通过比较模型结果与实际系统运行结果的偏差来表示模型准确度,由于实际系统所处环境的复杂性和科学理论的局限性,要使仿真模型系统与实际模型系统的行为完全一致不现实,但二者所表现出的特性应该基本相同[5]。本文将利用UKF算法,结合GPS观测数据,对六自由度弹道模型的参数进行最优估计,并采用TIC不等式系数法,利用弹道重构得到的数据对弹道仿真模型进行定量分析和验证,以为仿真模型的可靠性提供依据。
1 弹道重构的实现
1.1 弹道重构状态模型
弹道重构的任务就是弹道参数估计,它是基于测量数据的弹体飞行状态参数估计。因GPS定位存在误差,为提高定位精度,必须对动态定位数据进行滤波处理,以估计出弹在飞行时的动态参数,进而有效地重构弹道。
GPS弹载接收机用于对飞行的弹箭进行探测,通过对实测到的弹道参数进行数据处理来计算出弹的实时位置、速度和姿态信息。根据上述弹道执行过程,在基于GPS测量数据的滤波过程中,需要用到弹道模型,整个状态方程组在地面坐标系下建立,描述无控火箭弹的空间运动方程组为:
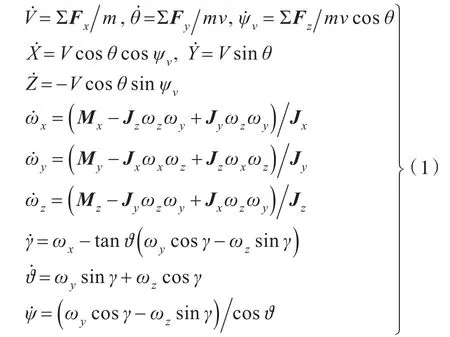
式中各符号的意义见参考文献[6]。非线性方程(1)只是对弹箭运动状态的近似描述,存在一定的误差,为了补偿这个误差,引入了一个随机噪声矢量作为状态扰动量,于是,系统的状态方程模型可简化为:

式中,w(t)为系统的过程白噪声矢量;X(t)为行为向量,

1.2 弹道重构量测模型
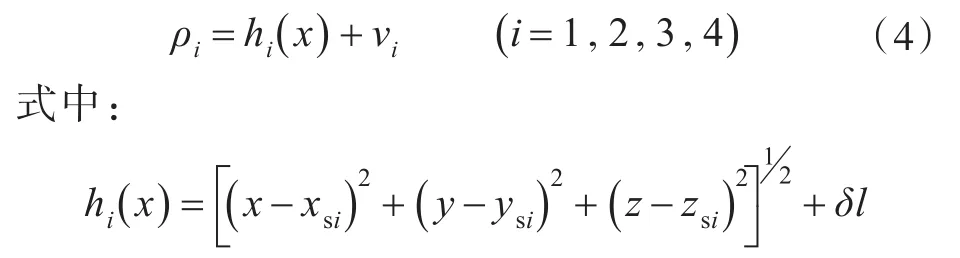
GPS接收机测量的是弹星之间的伪距:
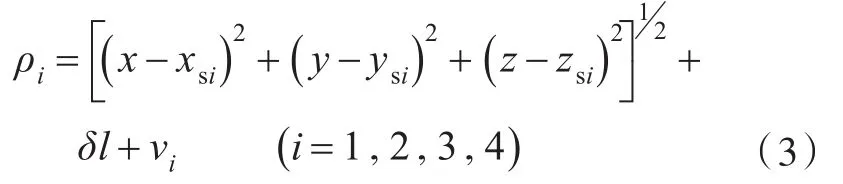
式中,vi为量测噪声;(x,y,z) 和 (xsi,ysi,zsi) 分别为弹和卫星在天球坐标系中的位置坐标;δl为由卫星钟差引起的距离误差。上式可以写为:
2 UKF滤波
系统模型(1)和量测模型(2)均为非线性,非线性滤波主要解决的问题是随机量沿非线性系统的传播。UKF算法是用一组确定性的采样点来近似状态分布,通过U变换得到变换采样点来近似状态的均值和方差,完成状态沿非线性函数的传播,对于Guass噪声变换采样点的分布,能够以三阶精度近似真实的均值和方差。
由于UKF使用的是离散时间非线性系统,因此,需要对系统模型进行离散化处理。本文采用四阶Runge-Kutta法以数值积分的形式实现,处理后的系统模型和观测模型为:

则UKF算法如下所示。
1)初始化
给定
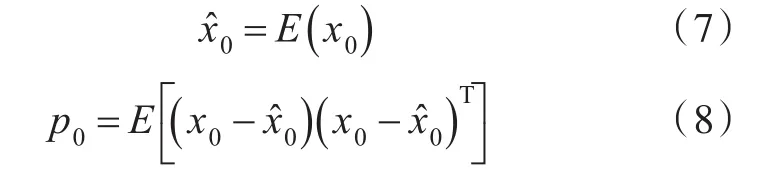
2)采样点及权值的计算
在初始化的基础上,按照如下规则选取采样点及其权值。
将上述采样点分别通过非线性系统。其状态预测值为:
上述整个算法流程及算法过程如图1所示。

图1 算法流程Fig.1 Flowchart of the algorithm
3 模型验证
模型验证就是比较仿真系统输出与实际系统输出的一致性,它分为静态性能验证和动态性能验证。对于弹箭这类复杂系统,人们往往关心的是其动态过程的性能参数,动态性能验证的实质是两个平稳时间序列谱密度的相容性检验。仿真模型最好能给出这些动态参数的定量验证指标,因此,本文将采用TIC不等式系数法对六自由度弹道模型进行验证。
TIC不等式系数法是在相同输入条件下,根据仿真数据和实际数据构造一个标量函数,以此作为衡量两类输出一致性和动态关联性的定性指标。这种方法对数据序列的要求比较宽松,不要求独立性和正态性,而且原理简单、计算量小,是验证模型输出与实际输出动态关联性的有效方法。
设αi和 βi分别为实际和仿真输出序列,数据长度为M,则TIC不等式系数为:

ζ越小,表明αi与 βi的一致性越好。将仿真数据序列与实际序列带入上式,便可求得ζ。
4 仿真与分析
已知火箭弹发射点的气象条件及卫星概略星历:发射点的纬度为45.004°,经度为120.01°。根据六自由度的弹体运动方程组,解算得到弹体的运动轨迹,将弹体飞行轨迹加载到GPS卫星模拟器内,卫星模拟器即可模拟产生该飞行轨迹上弹载GPS接收机接收到的卫星信号,并将该信号发射出来。弹载接收机则通过天线接收该信号并实现定位功能。
按上述方案进行数值仿真计算,采用6D弹道模型计算生成弹道数据。弹在飞行中会受到各种因素的干扰,如弹体初始扰动和发动机推力偏心。将各种干扰加入弹道进行仿真。火箭弹的射程为80km,飞行时间180s,滤波周期为0.5s。
仿真初始条件:x0=y0=z0=0 m,V0=80m/s,ωx=360 r/min,ωy=ωz=0 r/min ,ψv=ψ=γ=0°,ϑ=58°,位置误差均为15m,速度误差均为2 m/s,姿态误差均为2°。
根据弹载GPS飞行观测数据进行弹道重构。为了清晰地反映状态估计值与真实值之间的差异,采用误差曲线来反映算法的优劣。图2~图10给出了弹的位置、速度及姿态的误差重构结果。
由图2~图7可知,x方向上的位置和速度误差精度分别可达6 m和0.4 m/s,滤波稳定时间分别为45 s和35 s;y方向上的位置和速度误差精度分别可达10 m和1.0 m/s,滤波稳定时间分别为40 s和35 s;z方向上的位置和速度误差精度分别可达5 m和0.3 m/s,滤波稳定时间分别为28 s和30 s。弹道的位置估计误差和速度估计误差分别降低到了单纯的GPS观测误差的1/3和1/4左右,而且滤波发散问题和实际工程应用中的精度问题也得到了有效解决。
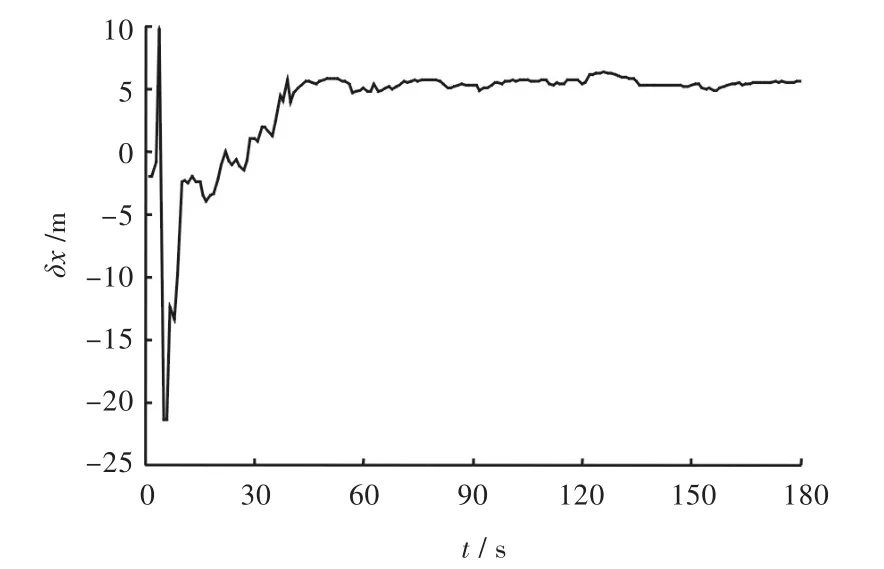
图2 x方向上的位置误差曲线Fig.2 Position error curve in the x-direction of coordinates

图3 x方向上的速度误差曲线Fig.3 Velocity error curve in the x-direction of coordinates

图4 y方向上的位置误差曲线Fig.4 Position error curve in the y-direction of coordinates

图5 y方向上的速度误差曲线Fig.5 Velocity error curve in the y-direction of coordinates

图6 z方向上的位置误差曲线Fig.6 Position error curve in the z-direction of coordinates
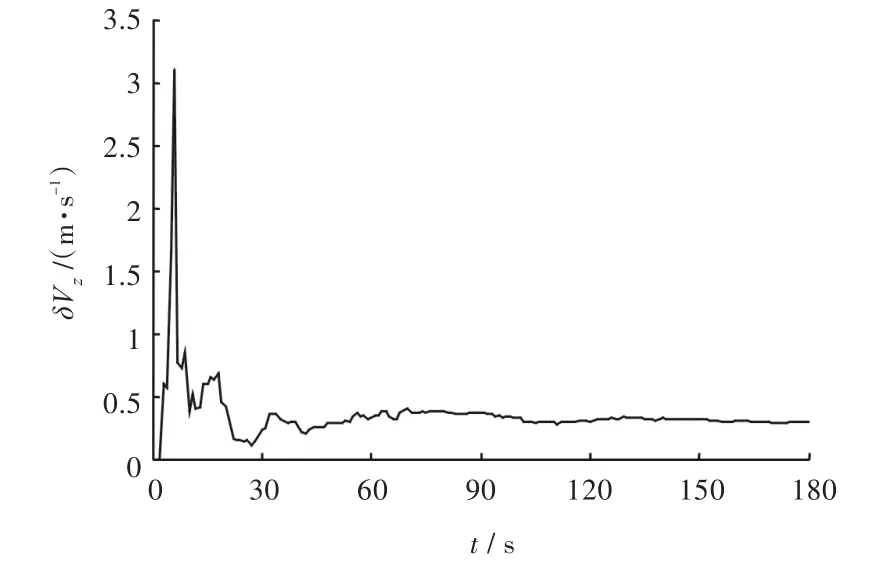
图7 z方向上的速度误差曲线Fig.7 Velocity error curve in the z-direction of coordinates
由图8~图10可知,弹的姿态角误差没有很好的收敛效果,系统状态变量误差的大小和敛散性由外部的观测信息决定。对于可观测的状态变量,经过卡尔曼滤波器后,其状态变量的误差会收敛,从而能将这些状态变量估计出来,但对于不可观测的状态变量,卡尔曼滤波器则无法观测。因此,还有待于进一步开展对GPS姿态测量系统的研究,从而有效提高弹的飞行姿态估计能力,提高火箭弹的射击精度。
利用弹道重构数据计算得到的赛氏系数如表1所示。结果表明,仿真模型的计算结果与实际飞行状态的一致性较好,证明利用弹道重构对弹箭六自由度仿真模型进行验证是有效的。
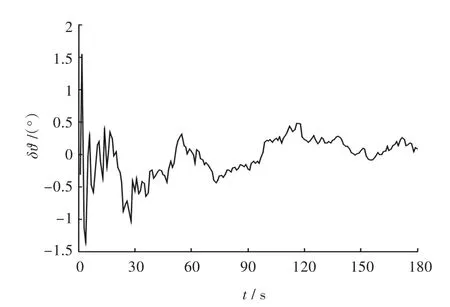
图8 俯仰角ϑ误差曲线Fig.8 Error curve of pitch angleϑ

图9 偏航角ψ误差曲线Fig.9 Error curve of yaw angleψ
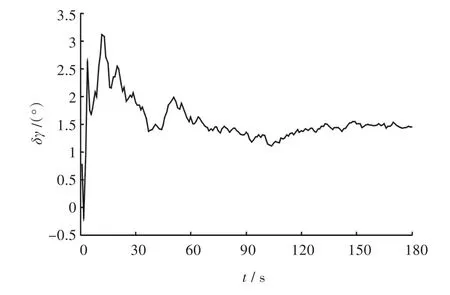
图10 滚转角γ误差曲线Fig.10 Error curve of roll angleγ
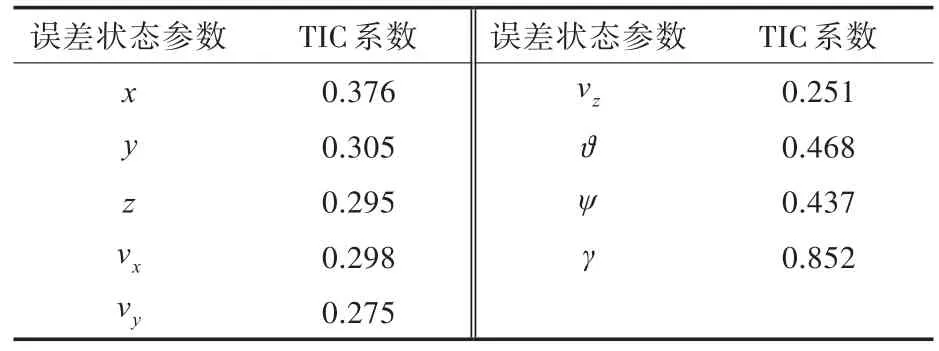
表1 TIC不等式系数计算结果表Tab.1 TIC inequality coefficients calculation results
5 结 语
本文采用弹载GPS观测数据对弹道重构进行了建模、仿真及分析,重构出了用于模型验证的火箭弹飞行状态误差参数,提出了以TIC不等式系数法作为火箭弹仿真模型验证的定量方法。计算结果表明,利用弹道重构对舰载火箭弹六自由度弹道仿真模型进行验证是有效的。该算法对舰载火箭弹的导航性能具有较大的现实意义,为在舰载火箭弹箭上的工程应用提供了一定的参考。
[1]史金光,徐明友,王中原,等.卡尔曼滤波在弹道修正弹落点推算中的应用[J].弹道学报,2008,20(3):41-43,48.SHI J G,XU M Y,WANG Z Y,et al.Application of Kalman filtering in calculation of trajectory falling point of trajectory correction projectiles[J].Journal of Ballistics,2008,20(3):41-43,48.
[2]唐吉祥,沈云山.卡尔曼滤波器在炮位侦察雷达中的应用[J].电光与控制,2004,11(1):48-49,52.TANG J X,SHEN Y S.Application of Kalman filter in cannon locating radar[J].Electronics Optics and Control,2004,11(1):48-49,52.
[3]廖瑛,梁加红,杨雪榕,等.导弹武器系统六自由度仿真模型验证方法[J].上海航天,2007,24(6):34-38.LIAO Y,LIANG J H,YANG X R,et al.Research on validation methods of six-degree-of freedom simulation model of missile weapon systems[J].Aerospace Shanghai,2007,24(6):34-38.
[4]杨祖快,刘鼎臣.反舰导弹射击精度的建模与模型验证[J].战术导弹技术,2002(3):18-22.YANG Z K,LIU D C.Modelling and model validation for firing accuracy of antiship missile[J].Tactical Missile Technology,2002(3):18-22.
[5]王红卫.建模与仿真[M].北京:科学出版社,2002.
[6]钱杏芳,林瑞雄,赵亚男.导弹飞行力学[M].北京:北京理工大学出版社,2008.
[7]李新国,曾颖超,刘金,等.弹道重构在导弹仿真模型验证中的应用[J].飞行力学,1998,16(4):82-86.LI X G,ZENG Y C,LIU J,et al.A trajectory reconstruction method of model validation on missile simulation[J].Flight Dynamics,1998,16(4):82-86.
[8]朱安福,景占荣,羊彦,等.UKF及其在目标跟踪中的应用[J].火力与指挥控制,2008,33(8):27-29.ZHU A F,JING Z R,YANG Y,et al.UKF and its application to target tracking[J].Fire Control and Command Control,2008,33(8):27-29.
[9]NORGAARD M,POULSEN N K,RAVN O.New developments in state estimation for nonlinear systems[J].Automatica,2000,36(11):1627-1638.
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
小哥白尼(趣味科学)(2022年3期)2022-06-09
北京航空航天大学学报(2021年7期)2021-08-13
电子制作(2019年7期)2019-04-25
电子制作(2019年23期)2019-02-23
北京航空航天大学学报(2017年9期)2017-12-18
制导与引信(2016年3期)2016-03-20
弹箭与制导学报(2015年1期)2015-03-11
