
基于WebAccess的精密球研磨网络控制系统设计
2013-05-08 23:32吕俊,张耀
机电产品开发与创新 2013年6期
吕 俊, 张 耀
(浙江机电职业技术学院 电气电子工程学院,浙江 杭州 310053)
0 引言
本系统从精密球的双自转研磨机理出发,采用模糊控制算法控制上研磨盘压力,基于MODBUS总线通信实现下内外研磨盘的转速协调控制,采用B/S网络结构的组态软件Advantech WebAccess,为磨球机控制提供了基于以太网现场数据采集、速度控制、远程管理、配方控制、数据记录等功能,很好的解决现有设备手动操作,无法进行网络监控的问题[1~6]。
1 磨球机的机械构成
双自转磨球机采用三研磨盘V形槽结构,包括上研磨盘、下内研磨盘和下外研磨盘。上研磨盘通过伺服电机拖动经压力弹簧实现对球坯的压力加载,下内研磨盘和下外研磨盘形成V形槽,支撑并带动球坯转动,下内外研磨盘转速分别通过伺服电机经减速机构独立控制。下研磨盘内外不同转速的组合,可实现三盘研磨方式下球体自转轴与公转轴的相对方位可变,使球坯表面获得均匀研磨,并提高研磨精度和效率。

图1 磨球机机械构成图Fig.1 Mechanical structure of Ball-grinding machine
2 磨球机的网络控制系统总体要求
为了保证磨球机的操作便利,并实现远程控制及高的加工精度和效率,对磨球机提出以下要求:①自动实现上研磨盘的上升与下降动作,使加载在精密球的压力控制精度在±1%,加压过程中要求实时显示压力值及加压过程;②实现精密球体磨球机下内/外研磨盘转速在0~100rpm范围内任意设定,且能够按照任意设定的速度曲线无级调速运行;③具有触屏功能,可通过触摸屏进行基本数据的输入与设定,亦可通过鼠标与键盘进行数据输入与输出;④建立工艺数据库,历史加工参数数据库。可随时调出数据库中的历史数据,以指导精密球体研磨机的加工;⑤周期记录上研磨盘压力,环境温度,下内/外盘转速,球体磨削量,研磨液流量值,并将其存储在实时数据库中;且每个参数均能将其数据绘制成历史曲线,并能随时参阅这些曲线;⑥具备Internet网络功能,可远程控制磨球机。
3 磨球机网络控制系统结构
Advantech WebAccess完全基于B/S网络架构,其基本组成部分如下:
(1)监控节点(SCADA node)用于连接自动化硬件设备,并且通过网络向客户端、其他监控节点及工程节点传输数据。
(2)工程节点(PROJECT node)用于系统设置的中央数据库服务器,客户端可通过工程节点动态浏览监控节点运行状况。
(3)客户端(CLIENT)直接连接到监控节点,显示实时数据的动态图面,而且允许线上管理员更改点值,确认警报和实时控制。
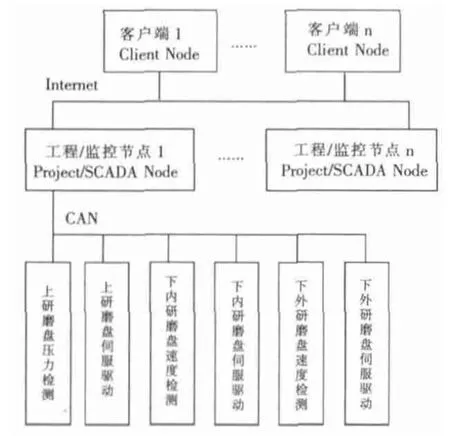
图2 磨球机网络控制系统框架图Fig.2 Network control system frame of ball-grinding machine
本系统采用WebAccess单机架构,系统框架如图2所示,工程节点与监控节点均安装于研华触控平板电脑上,置于机旁柜现场通过运行View-DAQ实现传统模式组态监控,并通过Internet发布监控画面和数据给客户端使用。每台触控平板电脑负责一台磨球机,通过MODBUS总线采集现场的数据:上研磨盘压力、下研磨盘转速,并发出控制指令给上下研磨盘的伺服驱动以实现实时控制。客户端使用Web浏览器访问工程/监控节点,实现磨球机的远程可视化监控。
4 磨球机网络控制系统设计与实现
本系统选用WebAccess作为软件开发平台,主要功能包括:上研磨盘压力控制、下研磨盘内外盘速度协调控制、参数实时监控、实时趋势、历时趋势、配方、报表打印等功能,具体框架见图3所示。
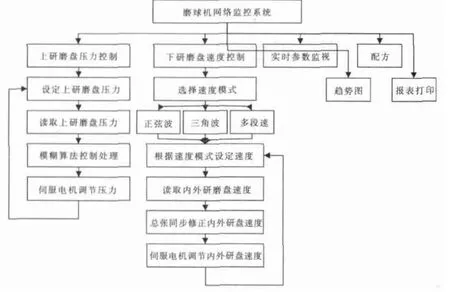
图3 磨球机网络监控系统主流程图Fig.3 Program flow diagram of ball-grinding machine network control system
4.1 上研磨盘压力控制的实现
上研磨盘主要用于精密球研磨的加压,压力具有较大的时变性、滞后性和非线性,压力加载系统好坏直接决定了材料去除效率,并影响球度。
研磨压力检测点在上研磨盘的加载块处,选用轮辐式称重测力传感器,相比传统的拉压式传感器,具有精度高、滞后小、重复性好、线性好等特点。
控制采用双输入单输出模糊控制算法,其原理如图4所示,模糊控制输入为给定压力SP与实测压力PV的差值E和压力差值变化率EC,输出量为伺服驱动电机的运行速度V。
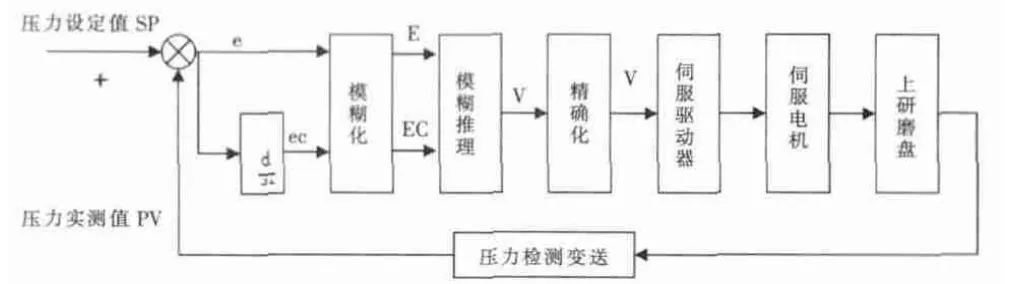
图4 上研磨盘压力模糊控制原理框图Fig.4 Structure frame of top-tray pressure fuzzy control
(1)模糊化处理和精确化。针对偏差e、偏差变化率ec和速度v进行模糊化,模糊论域分别定义为E、EC、V,论域范围统一为 [-6,6]。
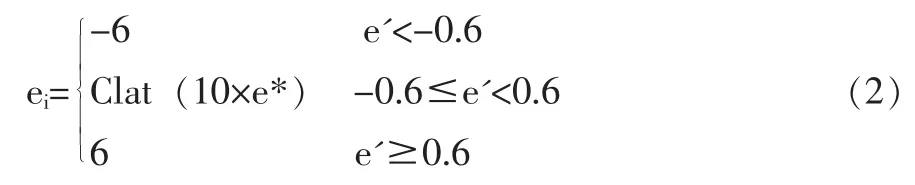
由于偏差信号e若不加处理进行模糊化,则在高分辨率的模糊集上变化会引起输出的激烈变化;而在低分辨率的模糊集上变化不明显的特点,故采用下列分段算式(2)进行模糊化, 对论域 E=[-6,6],ei={-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},ei∈E 有:

其中,标定因子K1=6/SP,SP—控制系统的设定值,设e的基本论域为 [-SP,SP]。
对于模糊论域E、EC、V,模糊语言值统一定义为NB,NM,NS,ZO,PS,PM,PB, 隶属度函数选用高斯型,偏差e隶属度见表1所示,其他语言变量一致。
为了将模糊推理结果用于伺服驱动器控制上研磨盘的压力,需要进行反模糊化处理模糊论域V,本文采用重心法。

表1 压力偏差ei对模糊子集{Ei}的隶属度Tab.1 Membership degree of eito fuzzy subgroup{Ei}
(2)模糊推理。根据双自转三轴研磨工艺理论,建立模糊推理规则如表2所示。

表2 模糊状态表Tab.2 Fuzzy status table
(3)模糊控制实现。根据得到的模糊表格在WebAccess Tcl脚本程序中建立表格数组;利用离散化的e(k)和e(k-1)值进行查表运算。经精确化后的速度指令通过MODBUS总线发送至伺服驱动器。
4.2 下研磨盘速度控制的实现[7]
下研磨盘由内外两个研磨盘组合成V型槽,内外研磨盘分别由伺服电机驱动,选用珠海运控PSDA系列伺服驱动器和配套伺服电机,经过减速箱速度控制在200rpm之内。内外转盘转速的不同组合以及研磨盘的转数决定了精密球球度和材料去除率,利用WebAccess TCL脚本程序实现下磨盘转速的协调控制及转数的控制,通过MODBUS总线传送至伺服驱动器。针对内外转盘分别提供了三角波、正弦波、多段速等三种方式供用户选择,不同转速的组合为磨球的均匀性提供了保证。在现场用户根据磨球机工艺原理和实际经验,多采用多段速方式工作。具体实施步骤如下:
(1)PSDA 伺 服驱动器的设置。0x51号参数:控制模式,选为APCM模式(内置 PLC); 0x52号参数:通信波特率,为38400bps。

图5 磨球机网络控制系统监控主画面Fig.5 Main monitoring picture of ball-grinding machine network control system
(2)WebAccess的组态编程。①添加通讯端口,接口名称为SERIAL,波特率为 38400bps,数据位8,停止位1,无奇偶校验;②添加通讯设备,设备类型为Modicon,报文大小设为数字包512,模拟包10;③添加数据变量点,以伺服电机实际转速vact为例,伺服驱动器相关参数电机当前速度n地址为0x05A0,转换为十进制为1440, 根据Modbus通讯时地址为实际地址加1,故而设为41441(首位4表示模拟量读写),据vact=n*vrat/4096=n*3000/4096≈n*0.732(rpm),标定因子设为0.732;④绘制监控画面,磨球机网络控制系统主画面如图5所示;⑤根据Modbus总线读取的内外研磨盘实际转速与设定转速的偏差值,使用Tcl脚本语言编写程序实时调整内外研磨盘转速。
5 结论
本系统已在浙江某精密机械加工厂实际在线运行,完全达到用户提出的要求,实现了精密球体研磨机下内/外研磨盘转速在0~100rpm范围内任意设定,按给定的速度曲线无级调速。实现了上研磨盘的上升与下降动作,压力控制精度在±1%。经实测本系统控制下的研磨机材料去除率达到了15μm/h,球度达到1.8μm。
[1]YUAN Ju-lng,WANG Zhi-wei,LV Bing-hai.Simulation study on the developed eccentric V-grooves lapping mode for precise ball[J].Key Engineering Material,2006.
[2]周兆忠,赵萍,陈苗青,等.精密球体研磨技术的现状与发展方向[J].新技术新工艺,2005,5.
[3]Rong Tsong Lee,Yih-Chyun Hwang,Yuang-Cherng Chiou.Lapping of ultra-precision ball surfaces.Part II.Eccentric V—groove lapping system[J].InternationalJournalofMachineToolsandManufacture,2006,10.
[4]LV Bing-hai,Yuan Ju-lng,Yao Y X,et al.Study on wear mode of silicon nitride balls in lapping process[J].Key Engineering Materia1,2006.
[5]金巧芬,金初云.对双自转式球体研磨机构V形槽夹角的仿真研究[J].新技术新工艺,2011,8.
猜你喜欢
厦门大学学报(自然科学版)(2022年4期)2022-07-15
铸造设备与工艺(2022年3期)2022-07-13
数学大王·低年级(2021年4期)2021-04-27
消费电子(2020年5期)2020-12-28
现代装饰(2020年7期)2020-07-27
运筹与管理(2019年10期)2019-12-17
中国金属通报(2019年3期)2019-05-24
现代冶金(2018年5期)2018-12-06
池州学院学报(2017年5期)2018-01-23
