超磁致伸缩致动器结构设计与静态特性实验
2014-01-15 09:33阳学进邓思琪李涛涛张争艳陶孟仑陈定方
湖北工业大学学报 2014年4期
阳学进,邓思琪,李涛涛,张争艳,陶孟仑,陈定方
(武汉理工大学智能制造与控制研究所,湖北 武汉430063)
磁致伸缩材料是一种能够实现电磁能与机械能相互转化的材料[1],具有高能量密度、大耦合系数与高磁致伸缩量等性能优势。超磁致伸缩致动器(GMA)是在超磁致伸缩材料基础上发展起来的,具有响应速度快、应变大、驱动电压低、控制力大的优点。GMA的结构设计在很大程度上影响其输出特性,本文详细介绍了GMA结构设计过程,并通过实验获得了GMA的静态特性曲线。
1 GMA结构设计
如图1所示,GMA主要由底座、壳体、螺母、顶杆、预压弹簧、冷却水管、GMM 棒、永磁体组成,GMM棒、底座、壳体、顶杆、螺母构成了一个封闭的磁路空间。
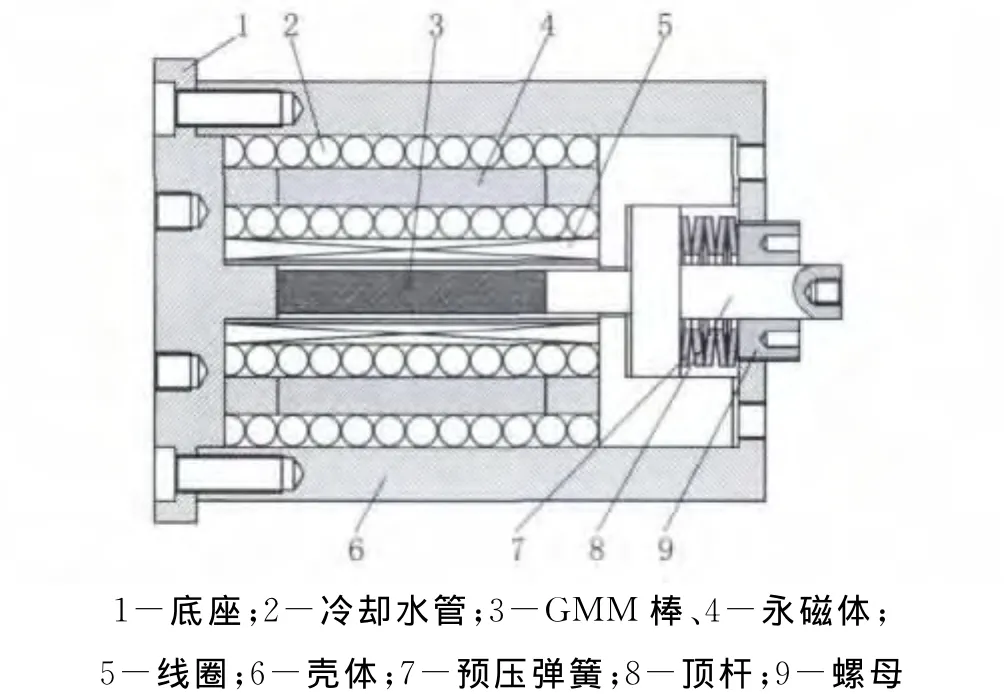
图1 GMA的基本结构
超磁致伸缩致动器的工作原理基于材料的Joule效应。Joule效应是指磁性体的长度随着外加磁场的变化而相应变化的现象。因此,外加磁场的设计是超磁致伸缩致动器结构设计的核心。
超磁致伸缩致动器的设计一般基于以下的考虑:优化磁路设计、优选GMM材料、优化线圈尺寸、设计合适的偏置磁场、沿着轴线施加与材料轴线严格平行的预压力、需要专门的温控装置[2-3]。
1.1 基本磁路设计
1.1.1 GMM棒选择 由于所设计的致动器应用于动态环境,因此需要考虑材料在动态条件下的损耗。文献[4]通过实验,对堆叠结构超磁致伸缩棒和整体超磁致伸缩棒的阻抗频谱曲线进行了对比,发现在动态条件下堆叠结构的超磁致伸缩棒损耗更小。本研究即采用堆叠结构超磁致伸缩棒。
1.1.2 驱动磁场设计 驱动磁场的设计主要包括电流密度、激励电流、导线直径、单位长度安匝数、单位高度安匝数、线圈内半径、线圈厚度、线圈总匝数、轴向磁场强度等的选择。驱动磁场各参数如下:尺寸大小,8mm×50mm;电流密度,4A/mm2;电流,1A;排绕系数,1.05;叠绕系数,1.15;线圈匝数,390;线径,0.8mm。
1.2 偏置磁场设计
部分磁畴的转动引起磁致伸缩,使得材料的内部发生形变,从而引起材料在磁场方向的伸长。随着磁场的增加,磁畴最后达到饱和。此时若是反向磁场,磁畴的转动也沿着磁场的方向发生反向,同样导致材料长度的增加。
在致动器中,驱动磁场由线圈通电产生,施加反向电流与施加正向电流都可产生正的磁致伸缩,发生机械运动的频率为输入电流频率的2倍,此时会产生倍频现象。
为了避免倍频现象,需要添加偏置磁场,其大小为磁化曲线线性段一半处所对应的值。在偏置磁场的作用下,超磁致伸缩棒产生一个初始伸长。当施加一个正向交流电流时,产生的磁场使磁致伸缩棒伸长。在交流电流的负半周,施加磁场与偏置磁场相互抵消,磁致伸缩棒的位移从中心位置逐渐减小。采用偏置磁场在交流激磁的条件下可得到与电流频率相同,以位置Δ为中心的机械振动。
在本设计中,利用永磁体提供偏置磁场,永磁体的矫顽力为895 000A/m。
1.3 预压机构设计
在棒材轴向施加预压力,一方面可显著提高材料在低磁场下的磁致伸缩,另一方面避免超磁致伸缩材料在工作时承受拉应力的作用[5]。在所设计的超磁致伸缩致动器中,为能够较好地提高超磁致伸缩棒的性能,选取的预压力大小为4MPa。预压结构实物组成见图2。

图2 预压机构组成
1.4 水冷结构设计
致动器驱动线圈通电会产生大量的热,而温度上升会导致超磁致伸缩棒发生热膨胀以及磁致伸缩系数不稳定[6],因此必须设计水冷结构来控制致动器的发热。目前采用比较多的冷却方式分为水冷腔和铜水管。本设计采用铜水管缠绕的方式进行冷却。本研究所设计的超磁致伸缩致动器的加工实物见图3。

图3 GMA的加工实物图
2 超磁致伸缩致动器静态特性实验
GMA静态实验研究的目的在于分析不同工作条件对GMA输出特性的影响,为GMA动态实验研究工况选择提供依据。本研究主要分析预压力及驱动磁场的变化对GMA输出特性的影响。
2.1 预压力对GMA输出的影响
在预压力实验中,通过调节所设计的销螺母高度来改变弹簧的伸缩量,从而达到实现不同预压力下实验的目的。选择预压力分别为1.38MPa、2.76 MPa、4.14MPa和5.53MPa的工作条件进行实验,得到GMA的输出位移曲线(图4)。
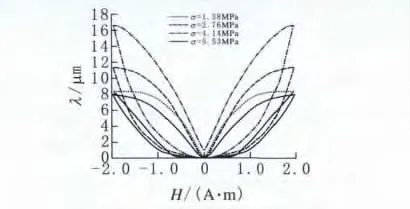
图4 不同预压力下GMA位移输出曲线
由图4可得:1)在不同预压力作用下,输出位移与驱动磁场形成良好的滞回环形状,验证了超磁致伸缩材料磁滞特性的存在;2)当预压力在1.38~4.14MPa范围内时,GMA最大输出位移随着预压力增大而呈现递增状态,当预压力增大到5.53MPa时,GMA最大输出位移骤然降低,且低于预压力为1.38MPa时的输出量。综合实验结果可知,预压力在4.14MPa以内,GMA最大输出位移随着预压力增大而增大;当预压力超过4.14MPa后,GMA最大输出位移随着预压力增大反而减小。因此GMA的最佳预压力大小为4.14MPa。
2.2 驱动磁场对GMA输出影响
GMA的输出受到预压力与驱动磁场大小的共同影响,综合预压力实验结果与磁场驱动范围影响结果,才能最终确定GMA的最优工作状态。在相同的预压力、不同的驱动磁场作用下,GMA的输出曲线见图5。
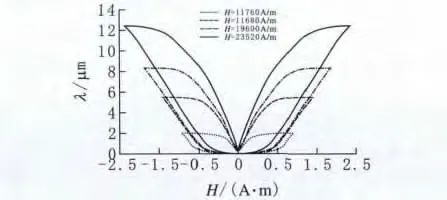
图5 不同驱动磁场下GMA位移输出曲线
从图中曲线可以看出,在同一预压力下,随着驱动磁场强度增大,GMA输出位移不断增大,说明局部范围内磁场强度增加,利于发挥GMA输出特性。另一方面,随着磁场强度增大,磁滞回线的滞环面积增大,说明超磁致伸缩材料位移增大的背后隐含着更多的磁滞能量损耗,因此驱动磁场的选取要在合理的区域。
3 结语
本文重点阐述了超磁致伸缩致动器的结构设计,并加工出致动器实物。同时通过实验测得了不同预压力、不同驱动磁场强度条件下GMA的输出位移曲线,并得到了相应的结论,为GMA的设计及工作情况优选提供了理论支持与实验依据。
[1] 姜德生.智能材料 器件 结构域应用[M].武汉:武汉工业大学出版社,2000.
[2] 邬义杰,刘楚辉.超磁致伸缩驱动器设计方法的研究[J].浙江大学学报(工学版),2004,38(06):747-750.
[3] 贾振元,杨 兴,郭东明.超磁致伸缩材料微位移执行器的设计理论及方法[J].机械工程学报,2001,37(11):46-49.
[4] 陶孟仑,陈定方,卢全国,等.超磁致伸缩材料动态涡流损耗模型及实验分析[J].机械工程学报,2012,48(13):146-151.
[5] 王博文.超磁致伸缩材料制备与器件设计[M].北京:冶金工业出版社,2003.
[6] 卢全国,陈定方,钟毓宁.超磁致伸缩致动器热变形影响及温控研究[J].中国机械工程,2007,18(01):16-19.
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
中国信息化(2022年5期)2022-06-13
当代陕西(2022年6期)2022-04-19
娃娃乐园·综合智能(2021年12期)2022-01-18
山西化工(2019年2期)2019-06-05
西南民族大学学报(自然科学版)(2019年2期)2019-05-17
中学生数理化·高二版(2016年12期)2017-02-28
北京航空航天大学学报(2016年6期)2016-11-16
光学精密工程(2016年6期)2016-11-07
Coco薇(2016年1期)2016-01-11