基于SIMULINK平面五杆机构运动学仿真
2014-01-15 09:33何珣,姚俊,张声
湖北工业大学学报 2014年4期
何 珣,姚 俊,张 声
(湖北省烟草公司武汉市公司物流配送中心,湖北 武汉430068)
平面连杆机构是由若干刚性构件用低副联接而成。其运动设计方法主要是图解法、解析法、图谱法和模型实验法等。随着数值计算方法的发展和计算机的普及应用,解析法已成为各类平面连杆机构运动设计的一种有效方法。Matlab的Simulink是一种即拖即用的方框式模块化仿真工具箱,只需编制较少的脚本文件或M文件就可实现复杂的动态仿真,本文以Simulink来解决连杆运动学仿真问题,可以方便地观察到机构运动特性的变化。
1 MATLAB和SIMULINK概述
1.1 MATLAB
MATLAB是当今国际上科技领域(尤其是自动控制领域)内最具影响力、最有活力的软件[1-3]。它起源于矩阵运算,并已经发展成为一种高度集成的计算机语言。它提供了强大的科学运算、灵活的程序设计流程、高质量的图形可视化与界面设计、便捷的与其他程序和语言接口的功能,被广泛应用于数值分析、数值和符号运算、工程与科学绘图、控制系统的设计与仿真、数字图像处理、数字信号处理、通信系统设计与仿真、财务与金融工程等领域,图1为MATLAB界面,图2为图形显示窗口。
1.2 SIMULINK
SIMULAB使得仿真软件进入了模型化图形组态阶段,它不但支持连续与离散系统以及连续离散混合系统,也支持线性与非线性系统,还支持具有多种采样频率的系统,不同的系统能够以不同的采样频率进行组合,从而可以对较大较复杂的系统进行仿真。同时SIMULINK还可以和 MATLAB、C/C++等其他软件进行数据传递,从而完成更为复杂的仿真工作。

图1 MATLAB界面

图2 图形窗口
Simulink的每一个模块实际上都是一个系统,一个典型的Simulink模块包括输入、状态和输出三个部分,在Simulink中,模块都是用矢量来表示这三个部分的,如图3所示。

图3 基本模型
在三个部分中,状态模块是最重要的,它决定了系统的输出,而它的当前值有时前一个时间模块状态的输入的函数。现有的状态模块必须保存前面的状态值,并计算当前的状态值。
1.3 SIMULINK的仿真过程
1.3.1 初始化阶段 主要完成的工作及其步骤如下:1)对模型的参数评估,得到它们实际计算的值;2)展开模型的各个层次;3)按照更新的次序对模块进行排序;4)确定哪些非显示化的信号属性,并检查每个模块是否能够接受连接到它们输入端的信号;5)确定所有非显示化的信号采样时间模块的采样时间;6)分配和初始化存储空间,以便存储每个模块的状态和当前值的输出。
1.3.2 模型执行阶段 对于一般的仿真模型是通过采用数值积分来进行仿真的,计算数值积分可以采用以下两步来进行:1)按照秩序计算每个模块的积分;2)根据当前输入和状态来决定状态的微分,得到微分矢量,然后把它返回给解法器,以计算下一个采样点的状态矢量。
2 机构运动分析的目的和方法
2.1 机构运动分析的目的
在机械设计或对现有机械的工作性能进行分析时,需要对机构进行运动分析。同时确定某一构件的行程或确定机壳的轮廓,为了避免各构件互相碰撞等原因,必须确定机构某些点的运动轨迹。这往往要求确定其机构构件上某些点的速度。而在确定机构构件上某些点的加速度或机器的动能和功率以及进行机构的力的分析时,也都必须先对机构进行速度分析。对于高速机械和重型机械,其构件的惯性力往往极大,必须先进行机构的加速度分析[4]。
2.2 机构运动分析的方法
研究平面运动分析的方法有图解法、解析法和实验法三种[5-6]。图解法较形象,但作图较繁琐,精度不高,常用的方法有速度瞬心法和相对运动图解法等;解析法则可得到较高的计算精度,但建立数学关系式时又较复杂,计算工作量也较大,随着计算机运用的普及,解析法将得到广泛的应用;实验法需要专门的仪器设备。
3 基于SIMULINK工具箱的平面五杆机构运动学仿真
3.1 平面五杆机构概述
平面五杆机构作为一种最简单的多自由度机构,在机械的创新设计中得到越来越多的应用。五杆机构由于具有较多的尺寸参数、不同的驱动方式及传动比,能实现更为丰富的连杆曲线,目前对于五杆机构的连杆曲线规律的研究还不够深入[7-8]。
五杆机构可以分为:双曲柄五杆机构、曲柄摇杆连杆机构、双摇杆连杆机构。闭链二自由度平面混合驱动五杆机构可实现复杂运动规律,是目前应用较普遍的一种机构,如平面二自由度并联机械手和混合输入型机电系统都采用二自由度平面五杆机构。要构成此五杆机构,各杆杆长之间需满足一定的关系[9]:
1)五杆中最短两杆长度之和小于其余三杆任一杆长,且其与最长杆长度之和小于其余两杆长度之和,以较长的三杆中任意相邻两杆为连杆;
2)五杆中最短的两杆长度之和大于(或等于)其余三杆任一杆长,最长两杆相等且相邻,且二者长度之和大于其余三杆长度之和,以相邻的最长两杆为连杆。
3.2 约束方程组的建立
每一根连杆均由一位移矢量来表示(图4)。取左边与固定机架相连的基础支座为坐标原点,两支座的连线为x轴,垂直于x轴的方向为y轴,建立直角坐标系[10-12]。

图4 五杆机构矢量图
取固定支架为固定杆件0,顺时针一次为连杆1、连杆2、连杆3、连杆4和连杆5,长度分别为L0、L1、L2、L3、L4。规定连杆角速度为连杆与x轴正向的夹角,如图4所示分别为θ0、θ1、θ2、θ3和θ4,其中θ0=0°。这样对于这一组位移矢量就可以构成一个便于正确表达和易于推导的闭环矢量方程,并且L2的矢端与L3的矢端在同一点,所以L1和L2的矢量和与L0和L3及L4的矢量和是相等的,即:

无论机构运动到何种状态,只要能够保证机构的几何装配条件,这个闭环矢量方程就一定能够成立,由于四连杆机构具有单一的自由度,因此当任意确定机构的某一个节点转角时,就必然同时限定了其余两个转角。为了将矢量方程(1)对时间求导数,首先将矢量方程分解成两个标量表达式,一个沿着x轴方向分解,一个沿着y轴方向分解,得

将式(2)和式(3)对时间求导数得:

整理得如下矩阵方程形式

同理可求出C点位移的矩阵方程式

根据矩阵方程式(6),通过 MATLAB中SIMULINK模块即可求出ω2和ω3,再对其积分,可求出杆件的角位移θ2和θ3;而对其求微积分,则可求出杆件的角加速度α2和α3。
3.3 编写M文件程序
为了在Matlab/Simulink中进行运动仿真,需要先编制二个函数文件,这二个函数为Simulink仿真模型的核心模块。其中依据式(6)编制的five_bar函数用于计算连杆及从动杆的角速度等,相应的M文件如下:


根据式(7)编制的position_C函数如下:

3.4 建立SIMULINK仿真模型
3.4.1 仿真模型的建立 仿真模型见图5。
3.4.2 仿真初始条件的确定 仿真时,需先确定双曲柄机构中各杆件的长度(L0、L1、L2、L3和L4)、初始位置(θ1、θ2、θ3和θ4)以及两个曲柄的转速值 (ω1和ω4)。
将函数five_bar嵌入到 Matlab Function模块中:在四个积分模块中输入初始条件,即当θ1和θ4为某一确定值时,求θ2和θ3的确切值。
可利用Auto CAD按尺寸画出四连杆位置结构图,调整标注精度尽量大,对θ1、θ2、θ3和θ4进行标注,再将其转换成弧度值,然后填入积分模块初始条件中。
3.5 仿真结果
点击start进行仿真,将五杆机构的原动杆和从动杆的角位移θ1、θ4、θ2和θ3、角速度ω1、ω4、ω2和ω3、角加速度α2和α3分别输入到Simout和Scope模块中,即可得到仿真结果。
3.6 仿真实例分析
如图4所示:分别取L0=250mm,L1=300 mm,L2=300mm,L3=400mm,L4=450mm,θ1=45°,θ2=259°,θ3=204°,θ4=0°,ω1=6.28 rad/s,ω4=3.14rad/s。
曲柄1每1s旋转1周,曲柄2每2s旋转一周。设仿真时间为4s,使曲柄1旋转4周,而曲柄2旋转8周,以利于观察仿真结果。设置Simulink中第一个常量模块ω1的值为6.28,设置第2个常量模块ω4的值为3.14,设置第3个常量模块的值为180/π。

图5 Simulink仿真模型
从Scope中可查看运动参数随时间t变化的波形图。从工作空间中可查看每一步长的运动数据及对应的时间。图6、图7、图8分别为连杆1、2、3、4的角位移、角速度、角加速度随时间变化的波形输出。Scope模块图形输出见图6~图8。
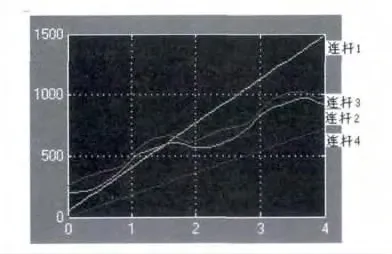
图6 连杆的角位移
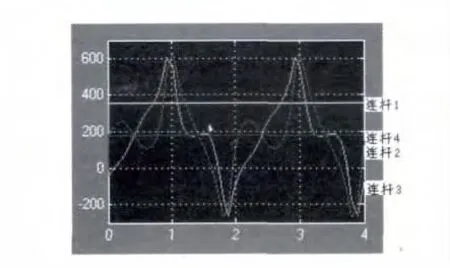
图7 连杆的角速度
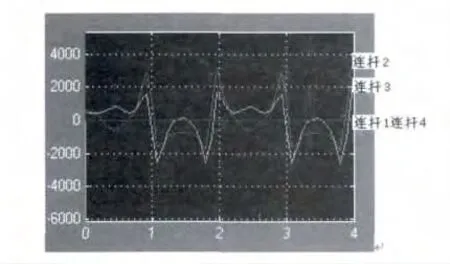
图8 连杆的角加速度
4 结论
本文对平面连杆机构中的双曲柄五杆机构进行了运动学仿真,根据机构的尺寸参数,借助复数矢量法建立连杆机构连杆运动参数数学模型,列出了所要分析机构角速度关系的闭环矢量方程后,用Matlab编制M文件,利用 Matlab/Simulink进行连杆机构的运动仿真,求出了机构在所计时间域内连续运动中各个构件的瞬时位置、速度和加速度。它得到的结果精度高,修改简单,只需修改个别参数即可对不同的平面连杆机构进行运动学分析。
SIMULINK仿真是实现机构优化设计的重要方法,特别是对于复杂机构系统,这一方法更加显示出其优越性。
[1] 张 森,张正亮.MATLAB仿真技术与实例应用教程[M].北京:机械工业出版社,2004.
[2] 张志涌.精通Matlab[M].北京:北京航空航天大学出版社,2003.
[3] 郑文纬,吴克坚.机械原理[M].北京:高等教育出版社,1997.
[4] 加德纳.机构动态仿真[M].周进雄译.西安:西安交通大学出版社,2002.
[5] 张启先.空间机构分析与综合[M].北京:机械工业出版社,1984.
[6] 王 勇,宋德朝.基于 MATLAB/SIMULINK的四杆机构连杆点轨迹仿真[J].机械研究与应用,2007,20(03):98-100
[7] Shimojima H,Ogama K.Kinematic synthesis of adjustable mechanisms(Part 2,Function generators)[J].Bulletin of JSME,1984,27:1025-1031.
[8] Shimojima H,Ogama K.Kinematic synthesis of adjustable mechanisms (Part 3,6-Link Mechanisms)[J].Bulletin of JSME,1986,29:2718-2723.
[9] 李学刚.平面五杆机构双曲柄存在的充要条件研究[J].机械科学与技术,2005,24(01):51-53.
[10]于红英,唐德威,王建宇.平面五杆机构运动学和动力学特性分析[J].哈尔滨工业大学学报,2007,39(06):940-943.
[11]卢刘明,蓝兆辉.平面五杆机构连架杆转角空间分析[J].机械科学与技术,2002,21(03):418-420
[12]廖汉元,孔建益,李 佳,等.平面两自由度铰链五杆机构的类型及判别[J].湖北工业大学学报,2006,21(03):4-6.
猜你喜欢
石油矿场机械(2022年3期)2022-06-17
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年11期)2021-09-05
装备制造技术(2020年2期)2020-12-14
设备管理与维修(2019年22期)2019-12-19
汽车实用技术(2017年16期)2017-09-21
中南大学学报(自然科学版)(2016年2期)2017-01-19
现代防御技术(2016年1期)2016-06-01
铁道通信信号(2016年10期)2016-06-01
新高考·高一物理(2016年1期)2016-03-05