
一种远距离水下光电成像的方法
2014-11-08 06:58邱卫根刘效东张补生孙建华
应用光学 2014年5期
张 平,邱卫根,刘效东,张补生,孙建华
(江苏北方湖光光电有限公司,江苏 无锡214035)
引言
水下探测在勘探、渔业、军事等领域是长期的课题,通常而言采用声纳系统可以获取较远的探测距离,但其分辨率较低,无法用于目标识别。近年随着合成孔径声纳系统[1-2]的发展,声纳用于高分辨率成像也成为了可能。但声纳系统采用了声波作为探测手段,并不能对所有的水下目标均获得较好的探测效果,且近场存在一定盲区。因而,采用光学方法在水下色散环境获取图像是水下成像探测的另一个途径,近年来国内外在该领域进行了较多的理论、系统及实验研究工作[3-5]。光波在水中传输时受到了介质阻挠而产生指数型衰减,因而光在水下传播距离较近。在水下光电成像技术手段中[3-6],距离选通[7-9]是一种有效获取远探测距离与高分辨率图像的技术手段。
增大探测距离是水下光电成像的努力方向,但随着距离的增大,目标回波能量急剧下降,图像特征无法在系统噪声水平下凸显,这是远距离探测的问题所在。为了获取更大的探测距离,可采用增大照明能量、增加接收口径、采用低噪声光锥耦合等技术手段。但这些都会付出价格昂贵或体积增大的代价,尤其是高峰值功率激光器,这些改进措施尽管可以提升系统探测距离,但不适合产品成本下降与推广。相比较而言,高频低峰值功率的激光器在系统成本及稳定性上更具优势,但一般会引起探测距离的下降。从光能量角度来看,探测距离的增大在于光能量的有效利用,高频低峰值功率激光器可以在单位时间内获取更高的平均功率输出,在适当的系统控制条件下,系统能够增大探测距离。
本文以水下探测的距离选通系统为出发点,分析了探测距离增大的可能性,根据水下目标特性,提出采用高频低峰值功率激光器提升系统整体运行频率的技术路线,通过多脉冲累计获取目标图像。
1 多脉冲累计
距离选通技术所获取的图像是激光在某时域段内积分图像,利用时域移动可进行不同时域内图像信息的获取。激光照明时,水体的后向散射极其强烈,尤其是在近场区。通过时域移动可有效避开这些区域的强散射光,提高接收时域段内的目标回波信号与水体散射的对比度。
激光照射水体所产生的散射光在理论上呈现出粒子散射特性[10-11]。由于水体密度较高,这些散射光需要经过多次散射才能够到达探测器。在这个复杂的光传播过程中,原先具有良好特性的光波变成了杂乱无章的漫射光,图像中表现为背景,且夹杂着探测系统自身噪声,形成了距离选通的背景噪声,更多表现出“噪声”特性。
目标回波在返回路途中同样要经历这些散射的过程,与水体散射不同之处在于回波带有目标反射特性,其表征为某种有序与相关。
利用水体散射、目标回波的不同特性,通过多脉冲累计可增强目标回波的信号、平滑水体散射信号,在图像上可表现为图像信噪比增强,探测距离增大。
利用上述原理,图1给出了距离选通系统通过降低激光峰值功率、提高运行频率而增大探测距离的示意。图1(a)为单脉冲距离选通成像示意图,发出的单脉冲能量较大,获取到的目标回波信号较强,同时伴随系统噪声;图1(b)为多脉冲距离选通成像示意图,发出的是多个单脉冲能量较低激光束,获取到的目标回波单个信号较低。如果将这些较低的信号在强度与时间上归一化至图1(a)情况,可以得到更高的单脉冲发射能量,带来更强的目标回波和噪声水平。由于噪声表现为随机性,在多脉冲累计后呈现为平均特性,而目标回波则为规律性累计,使得探测距离增大。

图1 多脉冲累计示意图Fig.1 Diagrammatic sketch of multiple-pulse accumulation
可见该方法需要在时域上进行多次的发射与接收,在牺牲系统的时间分辨率后获取更高的能量,从而得到更远的探测距离。
2 系统设计
距离选通系统框图如图2所示,包括激光照明器、ICCD探测器、系统控制器、图像采集器、显控终端等。系统采用的激光器为半导体泵浦Nd:YAG激光器,通过二倍频获取的激光波长为532nm,脉宽为6ns(峰值半宽),激光束散角约1°。ICCD探测器由接收物镜、超二代像增强器及耦合CCD组成。接收物镜中插有光学窄带滤光片,中心波长为532nm,带宽为10nm;像增强器采用超二代近贴管,后端通过光学耦合进行CCD耦合成像获取荧光屏图像。ICCD的选通方法为像增强器阴极选通,电压为+50V~-200V,脉宽为5ns~1s可调。系统控制器用于控制激光器与ICCD之间的有序工作和增益控制,采用FPGA结合模拟延长线实现激光器与ICCD之间的信号同步。图像采集卡用于高速图像采集,显控终端用于探测图像的显示与系统综合控制。系统工作时,由控制器控制激光器发射出光脉冲,且像增强器、CCD、采集卡都按照系统时序运行,当目标回波到达ICCD接收器时打开电子快门,在显控终端上实现图像显示。

图2 距离选通系统框图Fig.2 Block diagram of range-gated system
通常半导体泵浦激光器的单脉冲能量在100mJ时频率约为25Hz,若进一步提高系统能量会使激光器研制难度及代价较大;若进一步提高系统频率,则需要加上散热装置,这限制了系统的应用灵活性,且成本过大。若将单脉冲激光能量下降,则频率可以大幅提升,激光器系统稳定性得以增加,可以获取更多的平均光功率输出。ICCD的帧速率主要由像增强器及CCD决定,对于像增强器其阴极选通频率可达到上万赫兹,瓶颈在于荧光屏的余晖时间,将常用的P22荧光粉更改为P43荧光粉,余辉时间缩短一个量级,像增强器选通图像帧频由原来的50Hz提高为500Hz;将CCD的曝光时间更改为长时间积分,获取多激光脉冲产生的目标图像信号累计。通过CCD的长曝光更改,可以利用CCD自身的曝光特性进行噪声和目标回波的累计,避免了原系统方式下的图像频率提高而产生的大图像数据流传输及后端处理要求的提高,降低了系统硬件要求,更有利于系统集成与成本控制。
通过系统更改,原距离选通系统由单光脉冲成像系统变为一个高频运行、帧累计系统。高频运行可有效增大激光器的平均光功率,从能量角度来看可实现更远的探测距离、更高的图像信噪比。
3 结果与分析
实验在国营第五五九厂水下光电成像实验室进行,激光器与ICCD探测器采用分窗口水平放置,朝前方水域内目标进行照明与探测,探测目标为镂空铝质靶板。
实验时,首先将激光能量设定为100mJ,ICCD选通门宽设定为20ns,进行单脉冲距离选通成像。通过调整激光器与探测器之间的光轴及选通参量获取目标图像信号,实现发射与接收光轴的“一致”。随即,将水下目标距离增大而系统参量保持不变,发现系统无法获取到此距离的目标图像,在增大系统增益后,可以获取到微弱的目标信号。靶板实物如图3所示。此时的信号过于微弱,无法用于图像识别,此即为系统最大探测距离约为24m,如图4所示。

图3 靶板形状Fig.3 Target shape

图4 24米处的微弱目标信号Fig.4 Weak objective signal of 24 m far away
按照设计,降低系统单脉冲能量,利用多频方式获取远距离的图像。将单脉冲能量降低至15mJ,其他参量均保持不变,并将靶板移至29m。在单脉冲成像情况下,系统无法获取目标信号,更多表现为随机噪声。控制激光器至高频工作状态,形成时序上多脉冲输出;且此时ICCD的选通门宽依旧保持为20ns,对多脉冲分别开门逐个接收;同时增大ICCD内的CCD曝光时间至相应多脉冲时间。此时由于开门时间只有20ns,激光器高频工作的脉冲时间间隔为毫秒量级,因此脉冲相互间不会发生混叠干扰。通过此更改,实现了多脉冲累计成像,发现系统可有效获取目标图像,且图像信号随着激光频率而显示不同特征。
图5为不同脉冲累计条件下的图像特点,图5(a)10次累计,图5(b)15次,图5(c)20次,图5(d)30次。发现,随着激光脉冲数量的增加,目标信号强度在增大,同时噪声也在增大。从图像特征来看,由于此时是系统的极限探测能力,像增强器的噪声表现较为明显,且CCD的噪声表现也极为明显。目标图像的绝对信号强度随脉冲数量的增大而增大,当强度超过一定程度后,目标图像出现了过饱和现象,而在噪声累计达到一定程度后,系统的图像质量开始下降,表现为目标-背景对比度下降,甚至无法界定目标-背景界限。
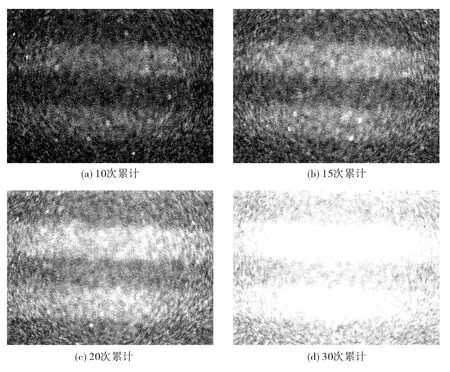
图5 多脉冲累计实验图Fig.5 Experimental pictures of multiple-pulse accumulattion
从图像中的噪声与目标特性角度分析,可以发现噪声更多的显示为一种非相关累加,因而整体背景亮度得以增大,但却无法体现某种相关性。水体的后向散射在理论上应当符合一定的散射定律,因而在散射中可获取某种相关性增强。但实验中发现,噪声更多地体现了随机性。可见实际过程中散射表现得非常复杂,回波已表现为随机噪声特性。因此,若考虑消除背景噪声,提高系统最远探测距离的难度较大。
目标图像更多的表现为某种相关特性,在多次脉冲照射后,目标强度在增强,形状清晰,可见目标回波在这类偏振激光照明下表现出更为稳定的固有反射特性。
通过实验与分析可以发现图像对比度的增强效果与累计的激光脉冲数量有关,实验发现10次脉冲的图像质量更高,脉冲数量的进一步增大反而使得图像的对比度下降不利于识别。实际应用中,利用这一特性进行脉冲数确定,并实时调整系统增益,使系统参量最优化。
可见,通过增大系统运行频率,利用水体散射与目标反射的相关特性差异,可在高频率、低脉冲能量情况下获取距离更远、质量更高的图像。增大距离数值受到影响的因素较多,这主要取决于CCD积分时间内的激光发射次数,若能量足够大,则探测距离可大幅增加。但该方法采用了累计方式,一定程度上减弱了系统的实时性,实际工程中不可能做CCD极长时间积分,因而增大的探测距离数值也随系统设计而异。需要指出的是,本方法以牺牲时间分辨率为代价,因而无法适用于高速运动物体,更适合一些相对“静止”或低速运动目标的观察。
4 结论
本文从水下距离选通系统的实际工程应用背景出发,分析了目前系统在远距离探测上的手段和问题,根据系统特性,提出了基于背景、目标不同反射特性的多脉冲累计方法。通过降低激光单脉冲能量,提高系统运行频率,保持CCD长时间积分的方式进行了系统改进,并进行了实验。实验发现,水体后向散射更多表现为一种随机噪声,而目标信号表现为相关特性,在进行一定累计后,系统可提高图像质量与探测距离。该方法可应用于勘探、军事中的一些实时要求不高场合,尤其适用于一些静止或准静止的物体探测。该方法可大幅降低距离选通系统的研制难度和价格,带来更远的探测距离,有利于水下光电成像产品的商业化发展。
[1] Duan Jiangtao,Huang Yong,Liu Jiyuan.A kind of synthetic aperture sonar using multidimensional waveform encoding[J].Acta Acustica,2013,38(4):453-458.段江涛,黄勇,刘纪元.多维波形编码合成孔径声纳技术研究[J].声学学报,2013,38(4):453-458.
[2] Yue Jun,Tian Jiwei.Study on multi-subarray interferomentric synthetic aperture sonar [J]. Acta Acustica,2008,33(1):51-55.岳军,田纪伟.多子阵干涉合成孔径声纳[J].声学学报,2008,33(1):51-55.
[3] Chen Chao,Yang Hongru,Wu Lei,et al.Under water target detection with electro-optical system[J].Journal of Applied Optics,2011,32(6):1059-1066.陈超,杨鸿儒,吴磊,等.水下目标光电探测技术及其进展[J].应用光学,2011,32(6):1059-1066.
[4] Jin Weiqi,Wang Xia,Cao Fengmei,et al.Review of underwater opto-electrical imaging technology and equipment[J].Infrared Technology,2011,33(3):125-132.金伟其,王霞,曹峰梅,等.水下光电成像技术与装备研究进展[J].红外技术,2011,33(3):125-132.
[5] Cao Fengmei,Jin Weiqi,Huang Youwei,et al.Review of underwater opto-electrical imaging technology and equipment(I)——underwater laser range-gated imaging technology[J].Infrared Technology,2011,33(2):63-69.曹峰梅,金伟其,黄有为,等.水下光电成像技术与装备研究进展(上)——水下激光距离选通技术[J].红外技术,2011,33(2):63-69.
[6] Zhang Li,Sun Chuandong,He Junhua.Underwater imaging system based on adaptive optics[J].Journal of Applied Optics,2010,31(5):690-694.张利,孙传东,何俊华.基于成像自适应光学的水下成像系统研究[J].应用光学,2010,31(5):690-694.
[7] Chen Chao,Yang Hongru,Li Gaoping.Underwater objects detection using range-gated imaging system[J].Journal of Applied Optics,2011,32(4):662-666.陈超,杨鸿儒,黎高平,等.基于距离选通成像系统的水下目标探测技术研究[J].应用光学,2011,32(4):662-666.
[8] Wang Rongbo,Zhong Sencheng,Li Zeren,et al.Development of underwater range-gated imaging system based on laser illumination[J].High Power Laser and Partical Beams,2013,25(7):1666-1670.王荣波,钟森城,李泽仁,等.激光照明水下目标距离选通成像系统的研制[J].强激光与粒子束,2013,25(7):1666-1670.
[9] Kong Jie,Zhang Baomin.Computer simulation for underwater photoelectric imaging system[J].Journal of Nanjing University of Science and Technology:Natural Science Edition,2010,34(3):396-400.孔捷,张保民.水下光电成像系统计算机仿真[J].南京理工大学学报:自然科学版,2010,34(3):396-400.
[10] Ge Weilong,Hua Lianghong,Zhang Xiaohui.Singal to noise research in range-gated underwater laser imaging system[J].Infrared and Laser Engineering,2013,42(8):2022-2026.葛卫龙,华良洪,张晓晖.距离选通水下激光成像系统信噪比分析与计算[J].红外与激光工程,2013,42(8):2022-2026.
[11] Ge Weilong,Hua Lianghong,Zhang Xiaohui.Simulation and experiment of change rule of water backscattering light energy[J].Laser Technology,2013,37(6):756-759.葛卫龙,华良洪,张晓晖.水体后向散射光能量变化规律的仿真与实验[J].激光技术,2013,37(6):756-759.
猜你喜欢
天文学报(2022年6期)2022-12-12
数学物理学报(2022年3期)2022-05-25
北京航空航天大学学报(2020年3期)2021-01-14
河北省科学院学报(2020年4期)2020-03-19
科学(2020年6期)2020-02-06
数学物理学报(2019年5期)2019-11-29
电子制作(2018年9期)2018-08-04
中成药(2017年12期)2018-01-19
制导与引信(2016年3期)2016-03-20
雷达学报(2014年4期)2014-04-23
