
超大型船舶安全纵向间距计算模型
2014-11-29 03:07刘敬贤王先锋
中国航海 2014年4期
明 力, 刘敬贤 , 王先锋
(1. 武汉理工大学 航运学院, 武汉 430063; 2. 内河航运技术湖北省重点实验室, 武汉 430063)
超大型船舶安全纵向间距计算模型
明 力1,2, 刘敬贤1,2, 王先锋1,2
(1. 武汉理工大学 航运学院, 武汉 430063; 2. 内河航运技术湖北省重点实验室, 武汉 430063)
在分析船舶倒车冲程的基础上,应用交通流跟驰理论,研究超大型船舶纵向间距,建立超大型船舶安全纵向间距计算模型,并分不同情形给出计算实例。运用该模型对渤海深水航路超大型船舶的安全纵向间距进行计算,并将结果与用其他模型计算的结果相比较。发现:在水深吃水比lt;1.5时,运用该模型算得的安全纵向间距较大,更能保证船舶安全;在水深吃水比≥1.5时,运用该模型算得的纵向间距较小,有利于提高船舶通过能力、充分利用水域资源。结果表明:该模型在计算船舶安全纵向间距方面更有优势。
水路运输; 超大型船舶; 安全纵向间距; 倒车冲程; 交通流跟驰理论
随着天津港、曹妃甸港等环渤海沿岸港口大型原油码头、散矿码头陆续建成投产,渤海海域超大型船舶(15万吨级及以上且满载吃水为16.5 m及以上的船舶)流量持续增加,通航风险也越来越大。
渤海海域水深大部分在30 m以下,根据2006年年底交通运输部海事局对“老铁山水道至天津新港”和“老铁山水道至营口仙人岛”两条渤海海域超大型船舶深水航路进行扫测的结果,渤海海域内存在24.5~25 m的浅水区,起止范围为119°52′E~120°15′E,长度为35 km,对超大型船舶来说,水深吃水比lt;1.5,属于浅水海域;在深水航路之外,水深更浅,只有23 m左右。目前,经过扫测的深水航路宽度为1 000 m,超大型船舶在其中只能顺次前行,不能追越。为了保障超大型船舶的航行安全,需确定顺深水航路航行的超大型船舶的前后间距。
对于船舶纵向间距的研究,最早出现在参考文献[1]提到的船舶领域的研究中,认为船舶领域与船速、交通密度和潮流等因素有关,大型船舶的船舶领域纵向距离应取7倍船长;英国学者GOODWIN[2]对船舶领域作了进一步研究,认为船舶领域与船长、海域类型和交通密度等因素有关,船长300~400 m的船舶领域,船首部分为1.2 n mile,船尾部分为0.6 n mile;英国学者DAVIS[3]在船舶领域研究的基础上提出了动界(Arena)的概念,认为在船舶周围存在一个超级领域,即直径为5.4 n mile的圆,他船进入该领域时,驾驶员应立即采取行动以避免紧迫局面;国内许多学者[4-8]也已开始对船舶纵向间距进行研究,运用了不同的方法,并将其研究成果在内河某些航道上进行了应用,但目前的研究主要集中在内河。按照我国航海界的习惯做法,一般船舶前后间距保持在2 n mile,对于超大型船舶,应适当增加至2.5 n mile。
1 基于倒车冲程的纵向间距计算模型
1.1船舶倒车冲程
确定船舶航行安全纵向间距时,主要考虑在同一航路上行驶的两船,当前船因采取措施制动或因其他原因制动时,后船是否因来不及停船而与前船碰撞。这种情形主要与船舶的倒车冲程有关。
船舶在全速前进中开“后退三”,从发令开始至对水停止移动船舶所行进的距离,称为倒车冲程。倒车冲程又称紧急停船距离或最短停船距离。[9]
倒车冲程的经验估算法为
(1)
式(1)中:Sc为倒车冲程,m;g为重力加速度,9.8 m/s2;W为船舶排水量,t;kx为船舶前进方向虚质量系数,可经实验取得,超大型油轮(Very Large Crude Carrier, VLCC)或肥大型船舶可取1.07;Tp为螺旋桨倒车拉力,t,估算时可用Tp=0.01Np(倒车功率)来估算;V0为船舶倒车时船速,m/s。
根据上述公式,选取一些实船数据进行计算,结果见表1。

表1 船舶倒车冲程计算实例
1.2船舶安全纵向间距模型构建
假设两艘船舶在同一航道上一前一后同向航行,可根据交通流跟驰理论[10]确定船舶的安全纵向间距。
交通流跟驰理论来源于公路交通,主要研究在限制超车的单车道上行驶的车队中,前车的速度变化引起的后车的反应。在同一航道上顺次航行的船舶不能追越时,前船的制动对后船的影响与公路交通的情形非常类似,因此可根据交通流跟驰理论的基本原理确定船舶安全纵向间距(见图1)。
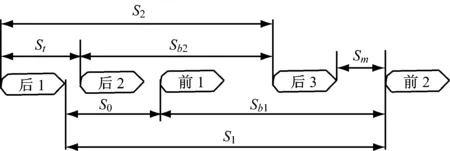
图1 交通流跟驰理论示意图
图1中:前1和后1分别为前船和后船的初始位置;后2为后船开始采取制动的位置;前2和后3分别为前船和后船完成制动时的位置。
以前船开始制动的时刻为参考时刻,前船完成制动时与后船初始位置的距离S1为
S1=S0+Sb1
(2)
式(2)中:Sb1为前船的制动距离;S0为前船制动前两船净间距。
对于后船而言,从发现前船制动、后船作出反应而发出命令到后船作出制动动作这段时间(反应时间)内,后船继续航行的距离为St,后船的制动距离为Sb2,故从前船制动到后船完成制动,后船的移动距离S2为
S2=St+Sb2
(3)
式(3)中:St=Vt,V为前船制动时后船的速度,t为后船反应时间,包括驾驶员对前船制动的反应时间和制动动作时间。
在两船先后完成制动时,两船的距离应大于安全余量Sm,即
S1-S2≥Sm
(4)
将式(2)、式(3)代入式(4),整理可得船舶安全纵向间距模型为
S0≥Sb2+St+Sm-Sb1
(5)
式(5)中:S0为前船制动前两船净间距;St为反应时间内后船航行的距离;Sm为两船先后完成制动时两船应保持的安全余量;Sb1为前船的制动距离;Sb2为后船的制动距离。
1.3模型计算实例
在船舶安全纵向间距模型中,后船的制动距离Sb2应选用后船的倒车冲程,其值可从本船船舶资料中查得。当本船速度非表列引数时,可根据同一艘船舶的倒车冲程与船舶速度的平方成正比的关系算出(由式(1)可知)。
确定St和Sm时,对于St来说,主要在于确定反应时间。现代大型船舶都已配备自动识别系统(Automatic Identification System, AIS),前船的速度和航向信息会作为动态信息出现在后船的AIS中,船舶AIS动态信息的刷新时间为10 s,考虑到前船速度需要降低到一定的数值才能被发觉,驾驶员发现前船制动的时间取80~85 s,制动动作时间取3~5 s,反应时间共计90 s。考虑到雷达测距时未包括本船的长度和安全余量所提供的必要安全保障,安全余量Sm取1倍后船船长较合适。
为更好地诠释船舶安全纵向间距模型,利用表1中提供的具体船舶资料,分不同的情形给出计算实例。
1.3.1前船出现“撞墙式”停船的情形
船舶依次顺航路前行时,一旦前船发生搁浅事故,前船的制动距离Sb1就是所有可能发生的情况中的最小值(Sb1≈0)。因此,船舶安全纵向间距应为S0=Sb2+St+Sm。
假设后船为船舶1,并以额定航速航行,可算得
St=676 m,S0=5 924 m
同理,可算出其他船舶与前船之间的安全纵向间距(见表2)。

表2 船舶安全纵向间距计算结果 m
1.3.2后船速度大于前船速度的情形
当后船速度大于前船速度时,由于不能追越,后船必须减到与前船相同的航速航行,此时后船的倒车冲程应按照倒车冲程与航速的平方成正比的关系进行换算。
船舶3在船舶1后面行驶时,船舶3的航速必须减至14.6 kn,其倒车冲程也相应地减少为4 858 m。由船舶安全纵向间距模型可得
S0=Sb2+St+Sm-Sb1=905.6 m
1.3.3后船制动距离小于前船制动距离的情形
当后船制动距离小于前船制动距离(即Sb2≤Sb1)时,按照船舶安全纵向间距模型计算有可能出现负值的情况。例如,当船舶1在船舶2后面航行时,船舶1的航速减至14.1 kn,其倒车冲程也相应地减少为4 625 m。按照船舶安全纵向间距模型可得
S0=Sb2+St+Sm-Sb1=-427 m
结果显然是错误的,当后船的制动距离小于前船的制动距离时,只要考虑后船在反应时间内所行使的距离和安全余量即可,即S0=St+Sm。
上例中,船舶1在船舶2后面航行时,其船舶安全纵向间距应为
S0=St+Sm=943 m
2 模型应用——渤海深水航路超大型船舶安全纵向间距的确定
渤海深水航路超大型船舶的纵向间距主要由后船控制,后船驾驶员对本船的倒车冲程资料可从本船的船舶资料中查得,即Sb2应是已知的(见表3)。
为便于计算,不妨假设后船为前述船舶3。对于前船的制动距离Sb1,要视前船的船舶参数及其所采取的制动措施或发生的情况而定。根据船舶安全纵向间距模型分析,从安全角度考虑,Sb1应取较小值。

表3 船舶在额定航速时的倒车冲程
2.1水深吃水比lt;1.5(深水航路浅水区段)
超大型船舶在浅水中航行时,容易发生搁浅事故。一旦前船发生搁浅事故,前船的制动距离Sb1就是所有可能发生的情况中的最小值(Sb1≈0)。因此,船舶安全纵向间距应为
S0=Sb2+St+Sm
由“1.3.1”中的情形可知
S0=Sb2+St+Sm=6 905 m
2.2水深吃水比≥1.5
主要考虑前船采取其他制动措施或主机发生故障,其制动距离Sb1均应大于倒车冲程。因此,后船在确定安全间距时,前船制动距离Sb1取其倒车冲程是最有利的。
为获得比较准确的Sb1,在实践中可通过甚高频(Very High Frenquency, VHF)与前船联系,或通过其他手段获取前船的倒车冲程,从而确定Sb1的取值;然后根据上述模型算出船舶安全纵向间距。
当无法获得前船倒车冲程的准确值时,可根据各类船舶在额定航速时的倒车冲程经验数据确定前船的制动距离Sb1。
1) 当前船为15万~20万吨级的船舶时,由上述模型可得船舶安全纵向间距为
S0=Sb2+St+Sm-Sb1=3 005 m
2) 当前船为30万吨级的船舶时,由上述模型可得船舶安全纵向间距为
S0=Sb2+St+Sm-Sb1=1 405 m
2.3应用总结
将渤海海域深水航路中超大型船舶安全纵向间距计算结果与船舶领域理论及航海习惯做法关于船舶的纵向间距的要求进行比较(见表4)。

表4 船舶安全纵向间距计算结果比较 m
从表4中可看出,船舶动界给出的船舶安全纵向间距偏大,虽比较安全,但是船舶通过能力很低,水域资源浪费较大;水深吃水比lt;1.5时,即前船容易搁浅的情形,船舶领域和航海习惯做法给出的安全间距都偏小,不利于船舶安全航行;水深吃水比≥1.5时,船舶安全间距模型可在前船不同的情形下给出不同的计算结果,而其他方法都可给出同样的计算结果。比较计算结果可知,运用船舶安全间距模型得出的船舶纵向间距可在保证船舶安全的前提下提高船舶通过能力,可充分利用水域资源。
3 结 语
运用交通流跟驰理论建立了船舶纵向安全间距模型,并运用该模型对渤海深水航路超大型船舶的安全纵向间距进行了计算,计算结果是可信的。经过比对分析可看出,计算结果既可保证船舶安全、提高船舶通过能力,又能充分利用水域资源。但是从实际应用的角度看,该模型主要适于在航道或宽度受限水域航行的船舶间纵向距离的限定。在具体的船舶操纵过程中,还需考虑船舶倒车过程中船首会出现横向偏移,而在停车阶段采取向左操舵[11-12]的措施等,这些有待进一步研究。
[1] FUJII Y, TANAKA K. Traffic Capacity[J]. Journal of Navigation, 1971,24(4):543-552.
[2] GOODWIN E M. A Statistical Study of Ship Domains[J]. Journal of Navigation, 1975,28(3):328-344.
[3] DAVIS P V. A Computer Simulation of Marine Traffic Using Domains and Arenas[J]. Journal of Navigation, 1980, 33(2): 215-222.
[4] 何良德,姜晔,殷兆进,等.内河船舶跟驰间距模型[J].交通运输工程学报,2012,12(1), 55-62.
[5] 张玉喜,贲锋,李国帅.狭水道中航行船舶间距控制的研究[J].船海工程,2009,38(4):1-3.
[6] 侯海强,李祎承,初秀民.长江繁忙水域船舶间距模型[J].大连海事大学学报,2013,39(4):21-24.
[7] 刘绍满.内河船舶拥挤水域通过能力的研究[D].大连:大连海事大学,2006.
[8] 朱俊,张玮.基于跟驰理论的内河航道通过能力计算模型[J].交通运输工程学报,2009,9(5):84-87.
[9] 陆志材. 船舶操纵[M].大连:大连海事大学出版社,2000:34-36.
[10] 胡明伟. 交通工程学[M].北京:中国质检出版社,2012:73-76.
[11] 沈定安,刘洪梅.大型船舶倒车制动性能实用预报方法[J].船舶力学,2011,15(10): 1097-1101.
[12] 刘勇,黄向阳,刘明俊.船舶的制动和保向性研究[J].武汉船舶职业技术学院学报,2009(1):9-11.
CalculationModelofSafeLongitudinalDistanceforVeryLargeVessels
MINGli1,2,LIUJingxian1,2,WANGXianfeng1,2
(1. Navigation school, Wuhan University of Technology, Wuhan 430063, China; 2. Hubei Key Laboratory of Inland Shipping Technology, Wuhan 430063, China)
The crash stopping distance of vessels, and the calculation model of safe longitudinal distance for very large vessels are studied by the following theory of traffic flow. Several calculation instances in different situations are given. The safe longitudinal distance of very large vessels in deep water route of Bohai Sea is calculated by the proposed model and the result is compared to the results calculated by other models. The comparison indicates that the safe longitudinal distance worked out by the proposed model is better than others: it is bigger, therefore, is safer when depth draft ratio is less than 1.5, while it is smaller when depth draft ratio is equal to or greater than 1.5, which means the vessel transit capacity can be higher, and good for effective use of the water resource.
waterway transportation; very large vessel; safe longitudinal distance; crash stopping distance; following theory of traffic flow
2014-08-21
国家自然科学基金(51179147,51479156);交通运输部2012年海事科技项目(2012-35);中央高校基本科研业务费专项资金(2013-YB-004)
明 力(1973—),男,湖北阳新人,博士生,主要从事水上交通环境与安全保障技术研究。E-mail: limingt12@163.com
1000-4653(2014)04-0040-04
U676.1
A
猜你喜欢
初中生学习指导·中考版(2021年9期)2021-09-27
疯狂英语·新读写(2021年6期)2021-08-05
儿童故事画报(2020年7期)2020-08-03
小学科学(2020年6期)2020-06-22
火力与指挥控制(2020年2期)2020-04-02
创新作文(1-2年级)(2017年7期)2017-12-26
汽车之友(2017年2期)2017-04-14
电子制作(2017年24期)2017-02-02
北京航空航天大学学报(2016年7期)2016-11-16
海军航空大学学报(2015年3期)2015-11-11
