
一种船用太阳跟踪系统的设计
2014-11-29 03:07季本山
中国航海 2014年4期
季本山
(南通航运职业技术学院, 江苏 南通 226010)
一种船用太阳跟踪系统的设计
季本山
(南通航运职业技术学院, 江苏 南通 226010)
为提高船舶上太阳能光伏板的光电转换效率,充分利用太阳能,提出一种适用于船舶航行特点的太阳跟踪系统设计方案。在总结陆用太阳跟踪设计方案的基础上,根据船舶航行机动性大、具有摇摆特性等特征,通过GPS、陀螺罗经或磁罗经提供的船位、时间、日期和航向信息,运用模糊控制算法完成太阳跟踪系统的粗方位跟踪,利用新型光电跟踪传感器实现方位角和高度角的精确跟踪,形成一种双轴船用太阳跟踪系统。经过实船测试,验证了跟踪系统的正确性与可行性,达到了设计目的,提高了太阳能的利用率。
船舶工程;太阳跟踪;航向跟踪;光电跟踪;模糊控制;方位角;高度角
近年来,太阳能在船舶(尤其是沿海船舶、内河船舶)上的运用日益广泛,给船舶运输企业带来可观的经济效益。然而,由于船舶具有航向机动性大的特点,目前太阳能电池板只能水平固定在甲板上,这样在一天中的任何时刻,太阳光线都无法垂直射向光伏电池平板组件,使得光电转换效率较低,影响了太阳能的利用率。因此,设计一种太阳自动跟踪系统,在优化双轴跟踪系统的基础上增加船舶航向跟踪功能,使太阳能光伏平板能自动跟踪太阳照射最大的方向,从而提高太阳能板接收太阳能照射的能力,获得最大的光伏发电效率。
目前,国内外陆上太阳伺服跟踪系统按信号控制方式的不同可分为光电跟踪系统、视日运动轨迹跟踪系统、光电与视日运动轨迹相结合的跟踪系统[1];按机械控制方式的不同可分为单轴跟踪系统和双轴跟踪系统[2]。光电跟踪系统采用光电传感器,检测太阳的高度和方位变化,经过数据处理后控制太阳能电池板实时地跟踪太阳,保证太阳能电池板与太阳光线垂直。视日运动轨迹跟踪系统以太阳视日运动规律数据为基础,由于太阳日运动变化引起的太阳高度和方位不仅与时间有关,而且与地理位置有关,因此控制器数据处理量大,计算复杂。
船舶具有航向机动性大的特点,在船舶上直接使用陆上太阳伺服跟踪系统是不合适的。基于此,在综合考虑各种伺服跟踪系统特征后,设计一种新型光电位置传感器,在方位跟踪上以航向跟踪为初步调节,以光电跟踪为精细调节;在太阳高度上采用光电跟踪调节机构,使太阳能电池板保持与太阳光线垂直或基本垂直,从而构成适应船舶航行特点的双轴太阳跟踪系统。
1 太阳跟踪系统结构设计
1.1光电跟踪传感器结构
船舶上安装的太阳跟踪系统在进行太阳方位和船舶航向跟踪中,船舶航向跟踪起主导作用,且航向调整的频次更多。根据这一实际情况,设计太阳方位传感器阵列时主要考虑的因素是降低成本、提高跟踪的可靠性和稳定性。本设计方案中,所设计的跟踪传感器结构见图1,其中图1(a)为平面图。V1~V5为光敏电阻,其中:V1和V3为高度检测元件,当太阳高度变化时,受遮光体影响,其电阻阻值产生差异;V2和V4为方位检测元件,当太阳方位变化时,由于遮光体遮挡,其电阻阻值产生差异;V5为光照强度检测元件,用于检测阴天或夜晚的光照度。在此光电跟踪传感器中,因为船舶航行中会有一定摇摆,遮光体采用了正方体,试验证明正方体遮光效果比圆柱体更好。检测针垂直安装在传感器底板上,长度为10 cm,用来检验跟踪系统稳定后的跟踪效果,如果跟踪性能良好,检测针在底板上应没有或只有很短小的太阳影,即太阳能光电平板与太阳光线垂直或几乎垂直。

(a)(b)
图1 光电跟踪传感器结构图
1.2双轴机械跟踪结构
由于太阳日视运动是由高度和方位决定的,因此必须在高度和方位2个自由度上对跟踪太阳的伺服机构进行调整。不过,由于跟踪伺服机构安装在甲板上,船舶航行时方位跟踪更为复杂。本设计方案中采用的双轴跟踪器是在HYGD-20双轴跟踪器[3]的基础上改造的,高度和方位机构旋转均由减速器和电机驱动,高度角由安装在支柱上端的俯仰轴旋转来实现,电池板的法线相对于水平面可进行0°~90°调节;方位角由安装在机构底盘上的方位轴旋转来实现,电池板的法线相对垂直面有0°~180°的调整范围。2个自由方向均设有极限位置限位开关,防止在系统出现故障时损坏机械或烧坏电动。
双轴跟踪器支柱固定在陆地上,由地球作参考点,保证电池板的方位大方向是向南的(北半球),其余通过方位轴旋转来跟踪太阳。双轴跟踪器装船后,方位上失去了参考点,电池板的方位大方向无法确定,为获得参考点,在方位轴上增加了绝对光电旋转编码器,其与方位轴的转速比为1∶1。由于绝对式光电旋转编码器是将码盘角度直接进行数字化编码的,且具有零点位置固定、圆形码盘的旋转角度与输出编码一一对应等特点,将其作为双轴跟踪器方位检测传感器具有合理性和科学性。绝对式编码器的分辨率即为分辨角α,取决于码盘上的码道数n,两者之间的关系为:α=360°/2n[4]。在此选择单圈编码器码道数为10,并行输出有10位,最大测量范围为1 024,分辨角为0.35°, 编码器数据输出格式为格雷码。在安装时,将绝对式编码器零位调到与电池板平面垂直,即零位指向北时电池板应该对着南。另外,将方位轴的旋转调整范围改造为0°~360°,实现全回转,以适应船舶航行特点。
2 太阳跟踪控制系统硬件设计
2.1光电跟踪传感器信号处理电路
光电跟踪传感器上的5个光敏电阻(V1~V5)分别承担高度、方位和光照度信号检测的任务。信号的处理由运算放大器LM358构成的电压比较器完成,图2为高度角信号处理电路,可看出,当太阳升高时,由于遮光体遮挡,V1接收的光照强度小于V3,这时运放LM358的U1A中的2号脚获得的参考电压高于3号脚的输入电压,U1A中的1号脚输出OUT1为低电平;而在U1B中,因6号脚的输入电压高于5号脚上的参考电压,7号脚输出OUT2为高电平。OUT1为低、OUT2为高,两信号驱动跟踪器俯仰轴旋转,使电池板向上翻转,直到V1和V3光照度相同为止。方位角信号的处理电路与高度角信号相同(这里从略)。图3为光照强度信号处理电路,阴天时因V5光照度不足,运放U3的2号脚电位高于3号脚,比较器U3A的输出为低电平,而U3B的输出为高电平。这时控制系统将跟踪器俯仰轴旋转,使电池板至水平,跟踪系统停止工作。

图2 高度角信号处理电路

图3 光照强度信号处理电路
2.2电动机伺服电路
海宝是2010年上海世博会的吉祥物,以汉字“人”字为核心创意,体现出中国文化的特色。海宝的造型是汉字“人”和现代卡通形象的结合体。他有海浪般的头发、卡通化的表情、又大又圆的眼睛、圆润的身体,高高竖起的大拇指和站稳地面的大脚,全身是象征生命的海蓝色,充满想象力,这个形象可爱、个性、活泼,是中国对世界人民的盛情邀请,也象征了逐步发展和潜力无限的中国。“人”是中国的人,也是世界的人。文字把人类社会的原始阶段和文明阶段区分开来,文字可以记录语言、交流信息、积累知识,从而形成文化。汉字是中国几千年来特有的文字文化,它与卡通形象的结合加快了中国文化的传播。
本设计方案的跟踪器驱动电机采用永磁直流电动机,由蓄电池供电,驱动芯片采用H桥MC33186[5]驱动芯片。MC33186的主要技术参数有:工作电源电压为5~28 V、连续输出电流5 A,最大输出电流6.5 A,输出电流gt;8 A时短路保护动作等。该芯片最常用的使用方式是将COD和DI1接地,DI2接高电平时,利用IN1和IN2的电平控制使OUT1和OUT2输出不同极性的电压,从而使永磁直流电动机实现正反转。图4为MC33186的典型应用,IN1输入高电平、IN2输入低电平时,OUT1通过晶体管接到电源正极,OUT2通过晶体管接到电源负极,电动机正向运转;相反,N1输入低电平、IN2输入高电平时,OUT1通过晶体管接到电源负极,OUT2通过晶体管接到电源正极,电动机反向运转。

图4 MC33186芯片典型应用电路
2.3系统控制主电路
太阳跟踪控制系统以单片机为核心,整体框图见图5,主电路见图6。全球卫星定位系统(Global Positioning System,GPS)输出数据根据NMEA0183协议,通过RS485接口(主电路中J02)为跟踪控制系统提供时间、日期和经纬度信息;陀螺罗经(或磁罗经传感器)输出数据根据NMEA0183协议,通过另一个RS485接口(主电路J03)为系统提供船舶航向信号;2个MX485接口芯片分别由P2口的P2.4和P2.5置高电位实现GPS和陀螺罗经数据信号的分时接收;太阳能电池板相对船首的位置信号由十位光电旋转编码器通过主电路J04提供;方位角、高度角、光强度、风速信号经过主电路中的J01从P0口提供相关信号。风速信号经过J06送P3口的P3.4和P3.5。所有输入信号经过单片机处理后,由P2口的P2.0~P2.3经J05控制H桥MC33186驱动模块,从而控制方位角电机和高度角电机驱动方位轴、俯仰轴的转动。

图5 跟踪控制系统框图
3 太阳跟踪系统控制软件设计
根据船舶航行状态的特征,要使太阳跟踪系统具有良好的跟踪性能,必须解决方位角跟踪问题。分析太阳日运动规律可知,太阳方位在视时上午10时前和下午14时后一般每小时在15°以下变化,而在视时上午10时后和下午14时变化较快,一般每小时有30°甚至40°的变化;太阳的方位和相对航向的变化总是连续、缓慢、有规律的。在设计程序时,方位角跟踪以航向为初步跟踪,以光电跟踪为精确跟踪。双轴跟踪机构底座固定到船舶甲板上之后,太阳能电池板平面与光电旋转编码器零线垂直,而光电旋转编码器零线平行船舶首尾线并指向船首,这样太阳能电池板平面和船首(即航向)就建立了方位上的关联。通过船舶航向旋转方位电机可以使光电旋转编码器零线指向真北,这时太阳能电池板平面指向南,在地球的北半球能保证太阳光线直射的基本方向。但是,利用光电跟踪传感器对太阳方位进行跟踪的动态范围小,以北半球为例,如果总以光电旋转编码器零线指北为基准确定电池板的一个基本方向,那么,每次船舶改向后,光电跟踪的调整方位范围会很大,这样光电跟踪的效率就会降低,跟踪稳定性就会变差。为找出船舶改向后光电旋转编码器零线指向基准,在指北(北半球时)的基础上,利用模糊控制算法,根据时间、日期计算出当时太阳方位的修正量,确定一个新的光电旋转编码器零线指向基准,确保船舶改向后光电跟踪方位角调节范围很小或为零,提高跟踪效率和可靠性。

图6 跟踪控制系统主电路
在同一地理位置,太阳方位的变化不仅与时间有关,而且与日期有关,分析太阳方位年变化规律和时变化规律,建立模糊控制规则。将太阳年方位变化率CE作为模糊集合的论域,并取为[-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6],模糊子集为[NL,NM,NS,Z0,PS,PN,PL];将太阳时方位变化量E作为误差输入量,设E和CE的隶属度函数为三角形状(见图7),建立二维模糊控制器。根据太阳方位变化制定模糊控制规则(见表1),并计算得到模糊控制查询表;单片机程序通过查表的方式完成模糊控制算法,得到太阳方位的修正量Ae。
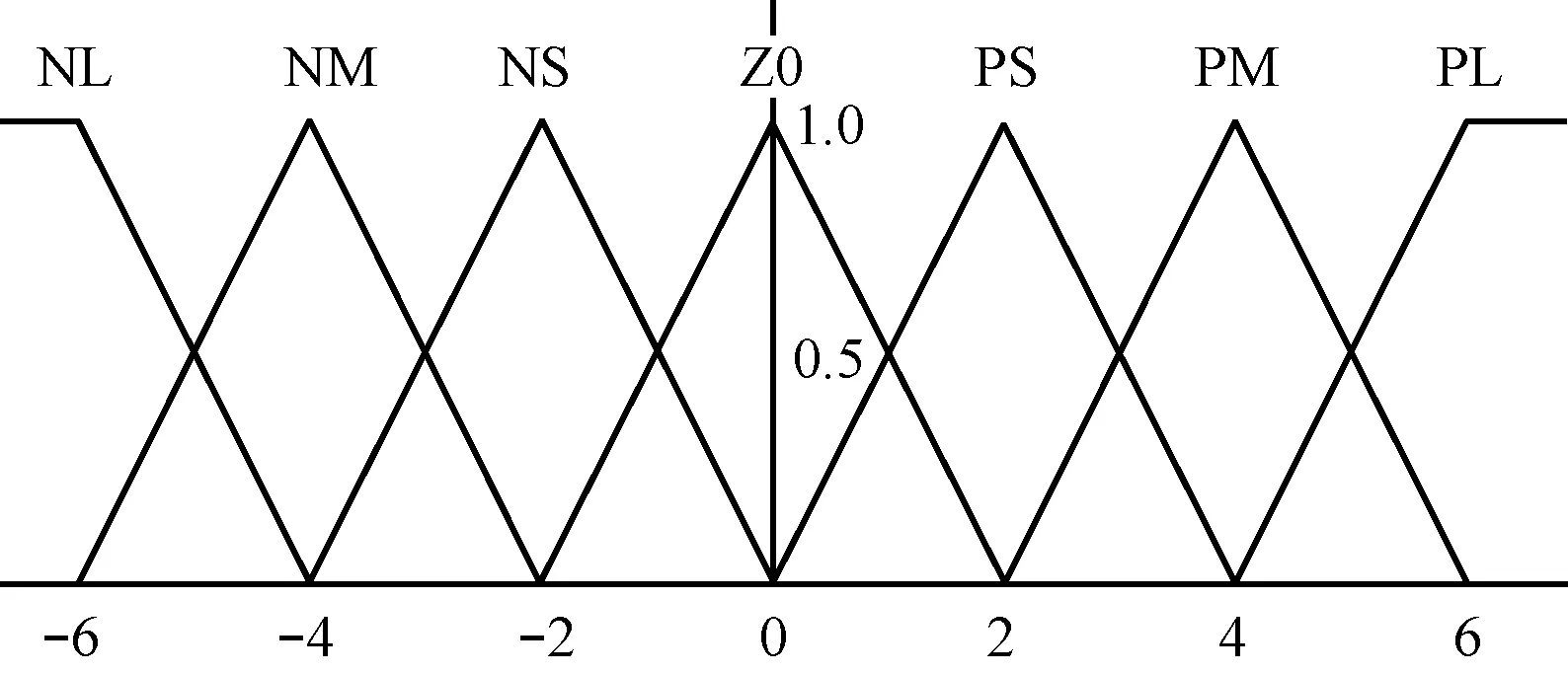
图7 隶属函数曲线图
跟踪系统从陀螺罗经串行数据输出接口或磁罗经传感器的信号序列的$-HDT[7]语句中提取出船舶的真航向,方位角跟踪电机以与真航向相反的方向旋转,使光电编码器的零线转至航向值上,即-TC(北半球时)。这样,船舶航向改变后,太阳跟踪系统将光电旋转编码器的零线调整为A=-TC+At+Aλ+Ae,此时电池板平面应与太阳光线垂直或基本垂直,船舶航向稳定后再通过光电传感器进行方位角精确跟踪。

表1 模糊控制规则
船舶在夜间航行时,航行灯或探照灯的干扰会使跟踪系统误动作,通过从GPS输出序列信号的GPRMC语句中获取UTC时间信号,并将其转换为区时(或船时)来确定跟踪系统的工作时间段,保证系统只在白天起动,在夜晚、光照强度传感器检测为阴天或检测到风力gt;12 m/s时停止工作,使太阳能电池板旋转呈水平态。
单片机通过J04接口读取光电旋转编码器的十位太阳能电池板位置信号,再用公式计算的方法把格雷码转换为二进制数,确定太阳能电池板相对船首角度。其算法是将二进制数Ci与格雷码Ri之间的关系表示为:Cn=Rn;Cn-1=Rn⊕Rn-1;Cn-2=Rn⊕Rn-1⊕Rn-2;…;C1=Rn⊕Rn-1⊕Rn-2⊕…⊕R1;C0=Rn⊕Rn-1⊕Rn-2⊕… ⊕R1⊕R0。
太阳跟踪系统控制程序流程图见图8。

图8 太阳跟踪控制程序流程图
4 实测数据与验证
将太阳跟踪系统安装在实船上进行试验,注意光电旋转编码器的零线位置与船首线的相对位置。经过实测,在阴天、夜晚和大风状态下都能使电池板置于水平。船舶航向机动时,跟踪系统的方位角调整响应时间lt;3 s;由于采用了模糊控制算法,船舶改向后光电传感器的方位角控制量很小,保证了光电跟踪的方位控制精度,方位跟踪精度达到了1°。由于船舶横摇周期短,船舶横摇时高度角跟踪有振荡现象,在高度角信号处理中增加了延时控制,克服了高度角跟踪的振荡,高度精度也达到了1°。用检测杆检查,跟踪系统稳定后检测杆的影子长度≤0.2 cm。太阳光线几乎垂直照射到太阳能光伏板上,船用太阳跟踪系统达到了设计的要求。
5 结 语
设计太阳跟踪系统时,首次提出适用于船舶航行状态的太阳能跟踪控制关键技术,最大限度地提高了太阳能的利用率。该系统具有结构简单、控制可靠、跟踪精度高、维护方便的特点。
[1] 陆仲达,田群宏,张金龙.一种太阳方位跟踪器控制系统的设计[J]. 鲁东大学学报:自然科学版, 2012(28): 18-22.
[2] 舒志兵,汤世松,赵李霞. 高精度双轴伺服太阳能跟踪系统的设计应用[J]. 伺服控制, 2010(4):31-33.
[3] HYGD-20双轴自动跟踪器聚光太阳能发电站说明书[K].山东华艺阳光太阳能产业的有限公司,2008.
[4] 孟扬, 张伟, 程君业. 编码器基础及应用[J]. 国内外机电一体化技术, 2007(1): 36-38.
[5] Motorola Inc.MC33186 Automotive H-Bridge Driver[EB/OL].[2010-04-05].
[6] 赵志礼,孟庆辉,张松涛,等.基于单片机的GPS定位信息处理[J]. 电子测试,2009(10):45-48.
[7] 黄凌.船舶偏航报警及航向记录仪的设计及实现[D]. 南京:南京理工大学,2007.
DesignofSun-TrackingSystemforShips
JIBenshan
(Nantong Shipping College, Nantong 226010, China)
A sun-tracking system is proposed to make full use of solar energy so as to improve the photoelectric conversion efficiency of solar photovoltaic panels onboard ships. The design is different from land sun-tracking designs because it must deal with maneuvering and swaying of ships. A twin screw ship sun-tracking system is designed working in coarse-fine mode. The coarse tracking of sun azimuth is performed by fuzzy control algorithm according to date, time, the position from GPS, and the heading from the gyro or magnetic compass, and the fine tracking of the sun giving azimuth and elevation angle is achieved by a new type of photoelectric tracking sensor. The design is verified through ship trial, which shows noticeable improvement of solar energy utilization.
ship engineering; untracking; course tracking; photoelectric tracking; fuzzy control; azimuth; elevation angle
2014-08-29
季本山(1961—),男,江苏如东人,教授,硕士生导师,从事船港电及其自动化教学与研究。E-mail:jbs@ntsc.edu.cn
1000-4653(2014)04-0100-05
TM615
A
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
舰船科学技术(2022年10期)2022-06-17
铝加工(2021年5期)2021-12-02
军事文摘(2021年18期)2021-12-02
新世纪智能(高一语文)(2021年3期)2021-07-16
湖南电力(2021年1期)2021-04-13
民用飞机设计与研究(2019年4期)2019-05-21
文教资料(2018年32期)2018-12-24
电子制作(2018年12期)2018-08-01
山东工业技术(2018年4期)2018-02-07
