
基于边界层理论的高超声速飞行器滚动通道自适应滑模控制
2015-03-10 07:08金顾敏陈光山
导航定位与授时 2015年6期
金顾敏,奚 勇,陈光山
(1.上海航天控制技术研究所,上海200233;2.上海市空间智能控制技术重点实验室,上海200233)
基于边界层理论的高超声速飞行器滚动通道自适应滑模控制
金顾敏1,2,奚 勇1,2,陈光山1,2
(1.上海航天控制技术研究所,上海200233;2.上海市空间智能控制技术重点实验室,上海200233)
针对倾斜转弯高超声速飞行器滚动通道控制中初始误差大,系统参数不确定和干扰严重的问题,基于边界层理论的相关结论,设计了一种自适应的滑模控制方法。该方法采用传统滑模面,避免了积分滑模在大初始误差下导致的大超调。改进的自适应调节律能够逼近系统的参数摄动和干扰上界,保证了整个控制过程的滑模可达性。同时,通过选取合理的参数,能够保证较小的稳态误差。理论分析和仿真结果验证了该方法的有效性。
高超声速飞行器;滚动通道;自适应滑模;切换增益
0 引言
理想的滑模控制对满足匹配条件的不确定性和外界干扰具有完全鲁棒性,为削弱控制器产生的抖振,同时抑制稳态误差,Slotine等在滑模控制的设计中引入了边界层,实现了准滑模控制,同时,在滑模面的设计中引入积分项来抑制稳态误差,为工程应用开辟了道路[1-3]。但在大的初始误差下,积分滑模会导致大的超调和长的调整时间而使系统暂态性能恶化。高超声速飞行器飞行速度大,飞行空域广,系统参数不确定性严重,还会受到各种干扰,具有强鲁棒性的滑模控制器可有效地应用于高超声速飞行器自动驾驶仪的设计。采用倾斜转弯控制技术的高超声速飞行器在做机动时,滚动控制系统要迅速把飞行器的最大升力面转到理想的机动方向,因此滚动角初始误差会比较大,这导致积分滑模控制器不能很好适用于高超声速滚动通道的控制[4]。
文献[5]在控制中采用了一种全局积分滑模,在抑制稳态误差的同时获得较好暂态过程,但控制器结构较复杂;另一方面,其滑模控制器参数的选取依赖于干扰信息,高超声速飞行器模型的不确定性要求选取较大的切换增益保证裕量,这会加剧舵机的抖振。文献[6]提出的根据当前滑模面距平衡面的距离为依据设计的切换增益自适应律结构简单,但实际应用中存在两个明显的问题。一是由于初始的滑模面距离较远,在初始阶段切换增益会迅速增大,远大于干扰上界值;二是在“实际”滑模控制情况下,仅能够保证滑模面趋于小量,这会使切换增益不断增大。
受以上文献启发,本文通过边界层理论分析系统稳态误差,对文献[5]中切换增益的自适应律做了改进,不仅能估计出广义干扰的上界,抑制了抖振,而且在保证稳态误差可控的同时获得良好的暂态过程。另外,控制方法实现简单,便于在工程上应用。
1 滑模控制
为方便叙述,考虑如下二阶单输入单输出系统,结论可推广到多输入多输出系统

(1)
式中:x为状态变量;u为控制量;d=Δf+Δg+w为有界的集中不确定性,其中,Δf和Δg为模型的不确定性部分,w为外部干扰;g(x)非奇异。
考虑跟踪问题,设xc为跟踪指令,则跟踪误差e=xc-x,设计如下切换函数
(2)
滑动运动的性能品质取决于参数c的值。采用趋近律方法设计控制器,选取指数趋近律如下

(3)
式中,k、ε为大于0的常数。
对式(2)求一阶导数,并结合式(3),可得
(4)


当ε>D时,取如下滑模控制率使系统在有限时间内趋于滑动模态,即s=0
(5)
证.取Lyapunov函数为

(6)
式(6)表明,系统采用式(3)的滑模面和式(5)的控制律,在干扰上界D已知,切换增益满足ε>D条件时,系统状态能够在有限时间内到达滑模面,系统稳定。
2 基于边界层理论的自适应滑模控制
式(1)在式(5)的作用下会出现抖振现象,为了消除抖振,通常采用饱和函数sat(s,β)来替代式(5)中的符号函数sgn(s),β表示边界层厚度,取为一个非常小的正数。
(7)
于是,滑模控制率变为
(8)

(9)
(10)
(11)
由上述推导可知,控制器中的参数ε的选取依赖于干扰信息D,若ε取得过小,控制器不能保证滑模面的可达性,系统将不再具有鲁棒性;当ε过大时,又会加强抖振,引发系统高频的不确定性,同时消耗更多能量,所以参数ε的选取是滑模控制器的关键。
(12)

证明.分四种情况分析

(13)
通过选取合适的参数c、k、β,能保证较小的稳态误差。
3 仿真分析
高超声速飞行器滚动通道控制系统仿真分析基于MATLAB/SIMULINK平台展开,仿真的目的是比较传统滑模、积分滑模,改进自适应滑模的暂态和稳态性能。
倾斜转弯高超声速飞行器滚动通道的动力学方程经过简化后可描述为
(14)
其中,ωx为滚动角速度,γ为滚动角,δx为副翼偏转角,c1为滚动力矩阻尼系数,c3为滚动舵面控制力矩系数,w为干扰。简化舵机动态环节为一阶环节,时间常数0.005s,±20°限幅。
在某一特征点下式(14)中的参数标称值为c1=-0.0945s-1,c3=-169.54s-2,流场扰动造成的气动参数误差、动力学方程线性化等引起的系统参数误差考虑极限情况,即系统参数+30%拉偏,外部扰动d根据力矩平衡关系以等效舵偏角的形式加入,设初值γ=0,ωx=0,滚动角指令为γc=20°,干扰作用等效为5°常值舵偏干扰。
分别设计以下3种控制器,为削弱抖振,3种控制律均用边界层函数替代符号函数,边界层厚度β=0.05。

(15)
仿真结果如图1~图5所示。
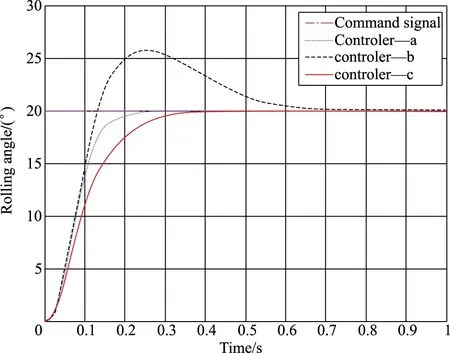
图1 滚转角响应曲线Fig.1 The response curves of rolling angle
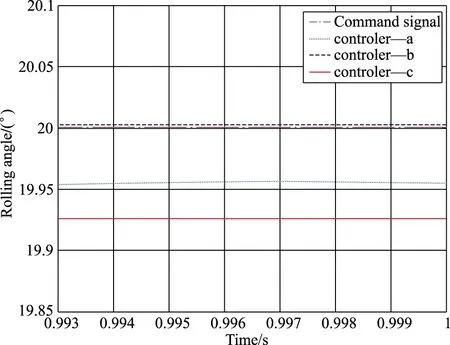
图2 稳态误差曲线Fig.2 The curves of steady-state error
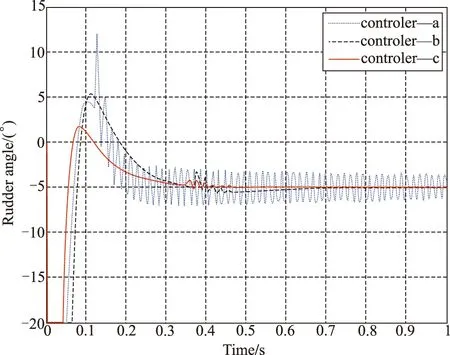
图3 舵偏角曲线Fig.3 The curves of yaw angle
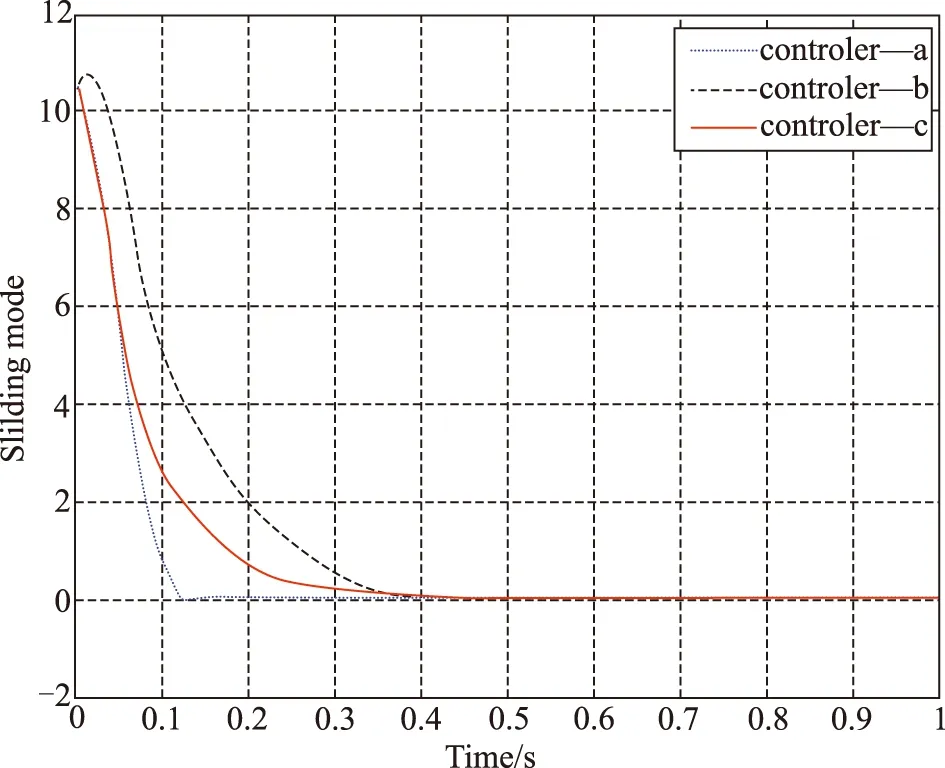
图4 滑动面曲线Fig.4 The curves of sliding mode
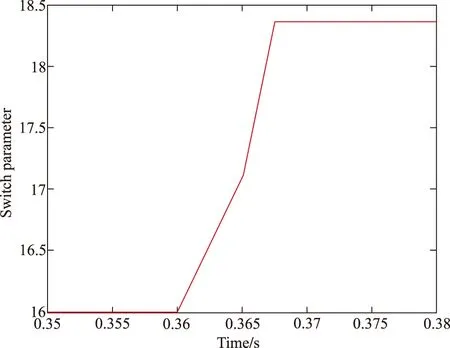
图5 自适应切换增益曲线Fig.5 The curve of self-adapting switch gain
采用控制器a时,实际应用中,由于不确定大小和未知扰动上界,为使滑模面在有限时间内到达边界层内,需要设定较高的切换增益。从响应曲线上看,在控制器a的作用下,系统能获得较大的响应快速性,tr=0.15,稳态误差0.04°。由于切换增益大,舵偏抖振明显,舵偏经过两次积分作用变换为滚转角,稳定时舵偏振动对滚转角的响应影响不大。但高频舵偏振动在消耗能源的同时,易诱发高频的谐振和不确定性,减低了系统的鲁棒性,这是滚转通道控制不期望的。
采用控制器c时,由图5可知,为克服广义干扰,从t=0.36s开始,切换增益由16增加到18.36后保持不变。稳态时广义干扰大小与等效舵偏和拉偏大小有关,其形式为
(16)
式中,η为拉偏系数,δs为稳态舵偏角,δw为等效的舵偏干扰。

4 结论
倾斜转弯高超声速飞行器滚动通道因其初始误差较大,传统的积分滑模控制方法不能很好地应用于自动驾驶仪的设计。文章通过边界层的理论,分析了滑模面的稳态误差,并以此为依据,结合当前滑模面离平衡态的距离,设计自适应律逼近系统参数摄动和干扰上界,避免了对复合干扰上界的先验要求,减小了滑模控制的保守性,抑制了滑模控制的抖振。同时,通过选定合适的参数,能够保证稳态滑模面,稳态误差较小。仿真结果表明,采用提出的自适应滑模姿态控制器,系统输出对姿态指令的跟踪性能良好,而且对气动参数不确定性和外部干扰具有较好的鲁棒性。
[1] 刘金琨,孙富春.滑模变结构控制理论及其算法研究与进展[J].控制理论与应用,2007,24(3):407-418.
[2]SlotineJJ,LiWP.Applicationnonlinearcontrol[M].NewJersey:Prentice-Hall,1991.
[3]ChernTL,WuYC.Designofintegralvariablestructurecontrollerandapplicationtoelectrohydraulicvelocityservosystems[J].IEEProceeding-D,1991,138(5):439-444.
[4] 熊柯,夏智勋,郭振云.倾斜转弯高超声速飞行器滚动通道的自适应全局积分滑模控制[J].国防科技大学学报,2012,34(2):114-118.
[5] 唐意东,李小兵,韦道知,等.基于反馈线性化的导弹姿态滑模控制律设计[J].现代防御技术,2013,41(6):61-65.
[6] 耿洁,刘向东,盛永智,等.飞行器再入段最优自适应积分滑模姿态控制[J].宇航学报,2013,34(9):1215-1223.
Adaptive Sliding Mode Control for Roll-channel of Hypersonic Vehicle Based on Boundary Layer Theory
JIN Gu-min1,2,XI Yong1,2,CHEN Guang-shan1,2
(1.Shanghai Institute of Spaceflight Control Technology,Shanghai 200233,China;2.Shanghai Key Laboratory of Spatial Intelligence Control Technology,Shanghai 200233,China)
Due to the large initial errors,uncertainties and disturbances in roll-channel of bank-to-turn hypersonic vehicle,an adaptive sliding mode control rule was introduced based on boundary layer theory.Traditional sliding mode is adopted to avoid the large overshoot when using integral sliding mode.Improved adaptive law can approximate the upper bound of parameter uncertainties and disturbances,which ensures the reachability of the sliding-mode during the whole control process.At the same time,error is controlled to a small extent on the basis of reasonable parameters.Theoretical analysis and simulation results show the effectiveness.
Hypersonic vehicle;Roll-channel;Adaptive sliding mode;Switch-gain
2015 - 09 - 18;
2015 - 10 - 13。
金顾敏(1990 - ),男,硕士,研究方向为导航制导与控制。
TJ765.2
A
2095-8110(2015)06-0007-05
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28
大电机技术(2022年2期)2022-06-05
军民两用技术与产品(2022年2期)2022-06-01
凤凰动漫(军事大王)(2022年1期)2022-04-19
空间科学学报(2020年3期)2020-07-24
航空发动机(2020年3期)2020-07-24
空间科学学报(2020年4期)2020-04-22
北京航空航天大学学报(2017年4期)2017-11-23
北京航空航天大学学报(2016年7期)2016-11-16
太空探索(2016年7期)2016-07-10
