
基于有色噪声自回归建模的惯性/卫星交互多模型滤波导航算法
2015-03-10 07:08赖际舟柳敏李志敏刘建业
导航定位与授时 2015年6期
赖际舟,柳敏,李志敏,刘建业
(1.江苏省物联网与控制技术重点实验室,南京210016;2.南京航空航天大学 自动化学院导航研究中心,南京210016)
基于有色噪声自回归建模的惯性/卫星交互多模型滤波导航算法
赖际舟1,2,柳敏1,2,李志敏1,2,刘建业1,2
(1.江苏省物联网与控制技术重点实验室,南京210016;2.南京航空航天大学 自动化学院导航研究中心,南京210016)
针对卫星量测噪声为有色噪声导致惯性/卫星组合导航系统滤波精度降低的问题,提出了一种基于有色噪声自回归建模的自适应交互多模型滤波算法。建立了有色噪声自回归模型,通过量测残差序列获取拟合模型系数,从而对称扩展得到系数模型集;并构建了交互多模型滤波框架,实现不同模型滤波器之间的数据融合。仿真结果表明,相比于传统卡尔曼滤波算法,该方法能有效改善有色噪声对滤波带来的影响并提高组合导航系统定位精度,具有较好的工程应用参考价值。
组合导航;多模型滤波;量测扩增;有色噪声;卫星定位系统
0 引言
随着区域导航(Area Navigation,RNAV)技术和所需导航性能(Required Navigation Performance,RNP)技术在民用航空应用的逐步深入,传统由陆基无线电为主的导航方式正逐渐转换为以星基导航系统为主,利用机载导航设备获取飞机精确的状态信息,从而保证飞行的安全性、可靠性和经济性[1]。
目前大型民航飞机上常用的机载导航传感器包括:惯性导航系统(Inertial Navigation System,INS)、卫星导航系统(Global Positioning System,GPS)、陆基无线电导航系统、大气数据系统等[2]。由于惯性导航是一种能全面提供导航参数、抗干扰性能强、动态性能好的自主式导航系统,但导航误差随时间积累;GPS是一种高精度的全球三维实时卫星导航系统,但其动态性能差,易受外界干扰,恰好与惯性导航系统的优缺点形成互补,因而INS/GPS组合导航系统成为机载导航的一种主要模式[3]。
在卫星定位导航方式中,由于选择可用性(Selective Availability,SA)、电离层传播误差、星历误差等的影响,GPS量测噪声呈现有色噪声特性[4-5],基于白噪声假设的卡尔曼滤波算法难以实现对有色噪声的有效处理,会导致组合导航系统的精度降低,从而影响飞机的飞行安全。为了解决有色量测噪声下的组合导航系统的信息融合,文献[6]等提出了一种相邻观测值组差法,即量测扩充法,将通过相邻历元的观测值线性组合形成新的观测值,从而将时间相关观测噪声转化为白噪声[6-8],但是,该方法需先获得精确的有色噪声模型系数;文献[9]等提出了一种基于滤波残差建模的方法[9-10],使用滤波所得的多个历元的残差序列对有色噪声进行拟合、预报和修正,但基于历史残差信息预报的当前历元的有色噪声也会存在一定偏差从而影响滤波效果。另外针对有色噪声的处理,常用的还有噪声协方差矩阵自适应估计[11]和渐消滤波方法[12],两种方法能在一定程度上减弱有色噪声的影响。
多模型滤波算法是一种自适应估计方法,采用多个基于不同模型的并行滤波器实现系统的融合,能解决滤波过程中模型和参数不确定对滤波带来的影响[13-15]。在量测扩充法的基础上,针对其中有色噪声模型系数难以精确获取的问题,本文提出了一种基于有色噪声自回归建模的自适应交互多模型(Adaptive Interacting Multiple Model,AIMM)滤波算法。该方法通过构建有色噪声自回归模型,根据量测残差数据获取拟合参数从而构建噪声系数模型集,并采用交互多模型滤波方法,实现不同模型滤波器之间的信息融合,能有效提高量测噪声为有色噪声情况下的惯性/GPS组合导航系统精度,对保障飞机高性能可靠飞行具有重要意义。
1 INS/GPS组合导航系统及有色噪声模型建立
1.1 惯性/GPS组合导航数学模型构建
惯性/GPS组合导航系统的状态方程和量测方程如下:
(1)
其中状态变量选取为[16]
X=[φE,φN,φU,δνE,δνN,δνU,δL,
δλ,δh,εbx,εby,εbz,εrx,εry,εrz,
(2)
式中,Xk为系统的状态变量,其元素为INS误差状态,包括平台误差角(φE,φN,φU)、速度误差(δνE,δνN,δνU)、位置误差(δL,δλ,δh)、陀螺常值漂移误差(εbx,εby,εbz)、陀螺一阶马尔可夫漂移误差(εrx,εry,εrz)和加速度计零偏(x,y,z)。Φk+1/k为系统状态转移矩阵,Gk为系统噪声转移矩阵,Wk为系统噪声,方差为Qk;Zk为量测向量,选取为惯性导航系统和GPS输出的位置和速度信息的差值,Hk为量测矩阵,Vk为有色量测噪声,且满足如下方程
Vk+1=Ψk+1/kVk+ξk
(3)
式中,Ψk+1/k为相关系数矩阵,ξk为白噪声,方差为Rk,且ξk与Wk不相关。
1.2 有色噪声自回归模型建立
考虑卫星导航系统量测噪声为有色噪声时,令
(4)

采用自回归方法建立有色噪声模型,利用残差序列实现对有色噪声的拟合,即k时刻的残差vk表示成
vk=β1vk-1+β2vk-2+…+βmvk-m+ek
(5)
对于整个残差序列,式(5)可以写为误差方程的矩阵形式
E=Bβ-V
(6)
其中

(7)
文中采用不含常数项的一阶自相关模型,根据历史观测残差数据对有色噪声的模型系数进行拟合。
2 基于有色噪声自回归建模的自适应多模型滤波算法设计与实现
采用基于量测扩增的卡尔曼滤波算法对有色噪声进行处理时,若要得到好的滤波效果,需要获取精确的有色噪声模型系数,但实际中无法事先获取。本文针对该方法的不足,提出一种基于有色噪声自回归建模的自适应多模型滤波算法,建立有色噪声的自回归模型,根据观测残差进行噪声系数的拟合,以估计的系数为中心,对称扩展得到模型集,采用交互多模型滤波算法,构建多个不同模型系数的滤波器,并假设多个模型之间的转换符合一阶马尔可夫过程,在滤波过程中,基于模型概率和模型转移概率实现输入交互,交互后的信息作为模型的输入,各个不同模型系数的滤波器在滤波过程中并行运行,最终利用更新后的模型概率值获取整个多模型滤波器的输出,从而实现组合导航系统的状态估计。基于有色噪声自回归建模的自适应多模型滤波方案如图1所示。
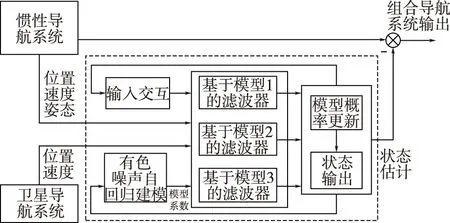
图1 基于有色噪声自回归建模的自适应多模型滤波方案图Fig.1 Schematic diagram of adaptive interactingmultiple model filter based on the colorednoise regression modeling

(1)输入交互
通过输入交互计算得到初始的状态估计和协方差估计,作为各自滤波器的输入值,包括状态交互和状态协方差交互。
(8)
(9)
(10)
(2)状态滤波
根据输入交互得到的参数作为滤波器输入,估计各自滤波器下一时刻的状态估计和协方差估计,采用的基于量测扩增的卡尔曼滤波器,其滤波方程如下所示,公式中各符号定义参照文献[17]
(11)
(12)
(13)

(14)
(15)
(16)
(17)
新息和新息协方差矩阵如下:
(18)
(19)
(3)模型概率更新
通过状态滤波后,计算得到第j个滤波器的新息和新息协方差信息,结合预测模型转移概率得到当前时刻模型概率的估计。模型的似然概率如下

(20)
由上一时刻模型概率、似然概率,以及概率转移矩阵得到当前时刻各模型的概率为
(21)
(4)状态输出
以当前时刻的模型概率为加权值将各个模型的状态估计和协方差估计进行融合得到当前时刻的状态估计和协方差估计的输出结果。
(22)
(23)
3 仿真结果与分析
设置如下仿真条件,并与传统卡尔曼滤波(Kalman Filter,KF)算法进行对比。
总飞行时间为2000s,飞机初始位置为东经106.49°,北纬29.53°,高度300m。GPS量测噪声设定为有色噪声,其中水平位置量测误差设定为30m,高度量测误差设定为50m,速度量测误差设定为0.1m/s;惯性导航系统中的陀螺等效精度为0.01(°)/h,加速度计等效精度为10-4g。载体飞行航迹为动态航迹,包括加速爬升、巡航飞行、机动转弯等多项机动动作。
多模型滤波器中一阶马尔可夫转移概率矩阵选取为
(24)
分别采用传统卡尔曼滤波算法(KF)及本文提出的自适应多模型滤波算法(AIMM)进行惯性/卫星组合导航系统信息融合,图2~图5分别为两种算法的经度误差、纬度误差、东向速度误差以及北向速度误差的对比曲线。
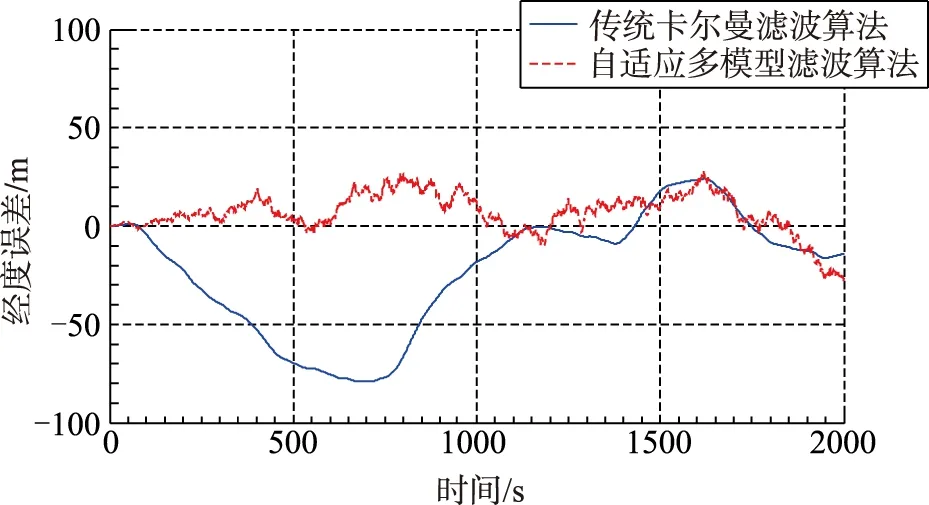
图2 经度误差对比曲线Fig.2 Comparison curve of the longitude error

图3 纬度误差对比曲线Fig.3 Comparison curve of the latitude error

图4 东向速度误差对比曲线Fig.4 Comparison curve of the east velocity error

图5 北向速度误差对比曲线Fig.5 Comparison curve of the north velocity error
文中选用均方根误差(Root Mean Square Error,RMSE)作为性能评估指标,对应不同误差类别得到的统计数据如表1所示。

表1 两种算法的性能统计对比Tab.1 Comparison of the performance statistics between two algorithms
可以看出,在观测噪声为有色噪声的条件下,传统的卡尔曼滤波算法由于噪声特性不符合白噪声假设,载体的位置和速度误差较大甚至呈现发散的趋势,而本文提出算法能根据建立的有色噪声自回归模型以及量测残差序列获取有色噪声相关系数,扩充得到模型系数集,采用交互多模型滤波器实现组合导航系统信息的有效融合,相比于传统卡尔曼滤波算法具有更好的导航性能,能较好地改善有色噪声给组合导航系统精度带来的影响。
4 结论
本文提出了一种基于有色噪声自回归建模的自适应交互多模型滤波算法。该方法针对传统量测扩增法中的不足,根据量测残差序列,采用自回归技术建立有色噪声模型,获取动态模型系数,对称拓展得到不同的模型集,能够以较少的模型个数实现对实际模态的覆盖,通过交互多模型滤波算法实现组合导航系统的信息融合。仿真结果表明,与传统卡尔曼滤波算法相比,本文提出的方法能有效提高有色量测噪声下惯性/卫星组合导航系统的精度,对保障飞机可靠安全飞行具有较好的参考应用价值。
[1] 赖际舟,王玮,刘建业,等.基于数值积分的机载导航系统ANP评估算法[J].交通运输工程学报,2013,13(5):115-120.
[2] 李大川,程农,李清,等.基于AFDX网络的飞行管理仿真系统[J].北京航空航天大学学报,2011,37(7):861-867.
[3] Liang Y,Jia Y.A nonlinear quaternion-based fault-tolerant SINS/GNSS integrated navigation method for autonomous UAVs[J].Aerospace Science & Technology,2015,40:191-199.
[4] Kim D M,Suk J.GPS output signal processing considering both correlated/white measurement noise for optimal navigation filtering[J].International Journal of Aeronautical & Space Sciences Volume Number,2012,13(4):499-506.
[5] 张小红,朱锋,薛学铭,等.利用Allan方差分析GPS非差随机模型特性[J].测绘学报,2015,02(2):119-127.
[6] 隋立芬,黄贤源,王冰.处理有色噪声的现代时间序列分析法[J].测绘科学技术学报,2013,30(5):443-447.
[7] Chang G.On kalman filter for linear system with colored measurement noise[J].Journal of Geodesy,2014,88(12):1163-1170.
[8] Petovello M G,O’Keefe K,Lachapelle G,et al.Consideration of time-correlated errors in a Kalman filter applicable to GNSS[J].Journal of Geodesy,2009,83(1):51-56.
[9] 杨元喜,崔先强.动态定位有色噪声影响函数—以一阶AR模型为例[J].测绘学报,2003,32(1):6-10.
[10] 崔先强,杨元喜,张晓东.导航解算中的有色噪声及其协方差矩阵自适应拟合[J].空间科学学报,2012,32(4):592-597.
[11] 杨元喜,高为广.两种渐消滤波与自适应抗差滤波的综合比较分析[J].武汉大学学报,2006,31(11):980-982.
[12] 宋迎春,朱建军,陈正阳.测量噪声时间相关的卡尔曼滤波[J].测绘科学,2006,31(6):60-62.
[13] 宋青平,刘荣科.自适应融合IMM的自主无线电载波跟踪算法[J].宇航学报,2015,36(5):605-612.
[14] Seah C E,Hwang I.Algorithm for performance analysis of the IMM algorithm[J].IEEE Transactions on Aerospace and Electronic Systems,2011,47(2):1114-1124.
[15] Nadarajah N,Tharmarasa R,McDonald M,et al.IMM forward filtering and backward smoothing for maneuvering target tracking[J].IEEE Transactions on Aerospace and Electronic Systems,2012,48(3):2673-2678.
[16] Xiuzhi Wu,Jizhou Lai,Min Liu,Pin Lv.Homologous fault monitoring technology of redundant INS in airborne avionics systems[J].Journal of Systems Engineering and Electronics,2013,24(6):1038-1044.
[17] 秦永元,张洪钺,等.卡尔曼滤波与组合导航原理(第2版)[M].西安:西北工业大学出版社,2012.
Interacting Multiple Model Filter Algorithm of the Inertial/GPS IntegratedSystem Based on the Colored Noise Regression Modeling
LAI Ji-zhou1,2,LIU Min1,2,LI Zhi-min1,2,LIU Jian-ye1,2
(1.Jiangsu Key Laboratory of Internet of Things and Control Technologies,Nanjing 210016,China;2.Navigation Research Center,College of Automation Engineering,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China)
Aiming at the problem that the filtering precision would degrade when the satellite measurement noise is the colored noise,a method of adaptive interacting multiple model filter algorithm based on the colored noise regression modeling is proposed.The regression model of the colored noise is established,and the fitting model coefficient is obtained from the measuring residual sequence which can be symmetric extended to be a coefficient model set.Interactive multiple model filtering framework is built to realize data fusion between different model filter.The simulation results show that the method can effectively reduce the impact of the colored noise to the filter,and improve the positioning accuracy of the integrated navigation system,so it has a great value of engineering reference.
Integrated navigation;Multiple model filter;Measurement expand;Colored noise;Global positioning system
2015 - 09 - 30;
2015 - 10 - 15。基金项目:国家自然科学基金项目(61174197,61428303)
赖际舟(1977 - ),男,教授,博士生导师,主要从事惯性导航及多信息可靠融合导航技术研究。
E-mail:laijz@nuaa.edu.cn
V249.3
A
2095-8110(2015)06-0019-06
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
中老年保健(2022年6期)2022-08-19
北京航空航天大学学报(2021年7期)2021-08-13
中学生数理化·八年级物理人教版(2020年11期)2020-12-14
电子制作(2019年23期)2019-02-23
Coco薇(2017年11期)2018-01-03
北京航空航天大学学报(2017年9期)2017-12-18
Coco薇(2017年8期)2017-08-03
百科探秘·航空航天(2016年9期)2016-12-01
太空探索(2015年5期)2015-07-12
