
基于移动对象数据库的导航信息更新机制设计
2015-12-04 07:06郑艳
舰船科学技术 2015年1期
郑 艳
(武汉职业技术学院 计算机系,湖北 武汉430074)
1 移动对象数据库
移动对象数据库 (Moving Objects Database,MOD)是当前一个新的研究领域。建立MOD的目标是将移动对象的状态、轨迹等信息以相关的信息表示,并存储于数据库中,从而可以通过访问数据库实现对于移动对象位置和轨迹相关信息的获取。
在MOD 中,移动对象可以是汽车、船舶、飞行器或移动通信终端。在构建MOD的过程中,需要实时地将对象的位置信息上传并存储数据库,使得数据库中的对象信息能够及时更新,没有断点。
在当前的研究成果中,部分学者和企业提出了相关的位置跟踪和更新方法,主要有固定时间位置更 新 机 制 (Fixed- Distance Location Update Mechanisms,FTLU)和固定距离位置更新机制(Fixed- Distance Location Update Mechanisms,FDLU)。前者的工作原理是设置固定的更新时间,移动对象以该频率向数据库上传信息;后者与前者类似,只是按照固定的距离上传而不是时间。这2种方法实现较为简单,在实际生活和生产中得到了较为广泛的应用,但是在时间和距离的设置上,需要考虑到信息的分辨率和相应开销的平衡,而这一平衡较难达到。此外,基于移动向量的更新机制(Motion- Vector- based location update mechanism,MVBLU)也是研究的热点之一。在文献中,有学者提出了一种能够利用对象运动轨迹和交通网络拓扑实现位置实时更新的方法。并且在MVBLU的基础上,基于ID 触发的位置更新(IDTLU)、基于速度门限的位置更新(STTLU)等方法被提出。
在当前的实际应用情境中,有2 种方式获得移动对象的信息,一种是通过船舶的黑匣子,另一种是通过实时通信技术。通过获取对象的位置信息,并将其实时的存储入移动对象数据库,使得对于对象过去、现在和未来的航迹管理成为可能。
2 船舶航迹的数据建模
与火车的轨道和汽车的公路不同,船舶的航迹受到多种因素的影响,具有较大的不确定性。船舶在航行过程中,按照事先制定的航线行驶,然而由于海面环境情况复杂,船舶的实际航迹与既定航线往往存在偏差。
在本节中将讨论如何对船舶的位置信息进行建模,在航行过程中,船舶的位置以经纬度的形式表达,其航迹也通常采用这种直接的方式描述。因此有以下定义:
定义1:船舶的航迹R 定义为

式中:rid 为该航迹的ID,用于识别和区分航迹;geo 为一个连续曲线或折线,用来描述航迹的几何特性;len 为航迹的长度;ARS (automic route section)为航迹的集合。
一条船舶航迹地直观描述,如图1所示。
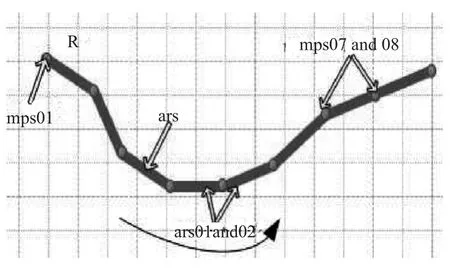
图1 航迹示意图Fig.1 The figure of ship route
根据图1 中的表示,可以对移动点进行定义:
定义2:移动点(mobile point,mp)是航迹的最小组成部分,ars 为一个移动点周围,前后2 条航迹之间的夹角,

式中:mid 为移动点的ID;(longitude ,latitude)为移动点的经纬度信息;course 为移动点的航向;dis为该点距离下一移动点的距离。则根据定义2,一条航迹可以看做1 组移动点的集合及定义移动向量。
定义3:移动点在t 时刻的移动向量可以定义如下:

式中:t 为某时刻;(longitude ,latitude)为移动点的位置;speed 为移动点的航速;course 为t 时刻移动点的方向;extra 为其他信息,包含操作参数、目的地、终端距离等。
为了更好地对航迹进行建模,将二维航迹扩展为三维,定义如下:
定义4:一个移动对象的空间-时间航迹是指为其二维航迹加上时间维度,其中时间维度记录的是该移动点被记录的时间。
一个移动对象的空间-时间轨迹如图2所示。

图2 空间-时间轨迹实例Fig.2 Example of spatial-time trajectory
根据图2所示的各个维度与轨迹,可将某个移动对象的轨迹表示为一组移动向量:

其中mvn为最后一个上传的移动向量,成为活动移动向量,如图3所示,通过活动移动向量,可以计算出移动对象的当前位置。
图3 是一个移动点的轨迹,其中虚线为在二维空间中观察得出的该移动点的轨迹。

图3 移动点轨迹Fig.3 Trajectory of a moving point
3 船舶航迹位置的更新机制
本节将讨论如何将移动向量和航行相关的特征数据,上传到服务器。在服务器中保存着移动对象以往和当前的所有位置信息,通过更新规则,确保上传的数据与实际航迹相统一,并能够确保更新过程的开销尽量小。
3.1 数据格式转换
在实际应用过程中,需要将航迹信息映射到经纬度坐标系中。在本文中选取WGS84 作为基准,由于船舶的位置能够实时映射在坐标系中,因而可以通过坐标系中移动点的运动速度,判断船舶的实际运动虚度。在坐标系中,默认选择北方为y 轴,东方为x 轴。
需要注意的是,在将经纬度映射为坐标的过程中,有可能存在误差和错误,为了尽量避免船舶的位置失真,在映射的过程中,应当设定一定的阈值,当数据超过该阈值时,则被认为非法,在阈值内时则正常进行数据映射。
3.2 位置更新机制
当船舶在海面航行时,导航信息系统会通过实时采集信息(如金维度、航速、航向、目的地等),并与之前已经更新的移动向量相对比。通过两者的比对,如果达到了更新的条件,则系统记录当前的移动向量,并上传给服务器,从而可以精确地控制当前船舶的位置。
通过对船舶航行中的真实数据和特征进行分析,考虑对经纬度、航速、航向等对移动向量影响较大的数据,定义更新机制的触发规则如下:
移动对象在ti时刻的移动向量为

式中(xi,yi)为坐标系坐标;vi为航速ci为航向;hi为方向;ni为操作配置;di为吃水深度;desi为目的地;ei为剩余到达时间。
假设ai为ti时刻的加速度,则在下一时刻ti+1,可得移动对象的位置(xm,ym)和速度vm为:

根据以上计算公式,定义以下触发规则:
规则1:计算(xm,ym)和(xi+1,yi+1)的欧氏距离,当该距离大于一定门限值时,则更新过程被触发;
规则2:比较vm和vi+1,当二者的差距大于一定门限值时,则更新过程被触发;
规则3:测量船舶的转向角,当ci+1的变化大于一定门限值时,则更新过程被触发。
在以上规则中,门限值的制定需要根据船舶的具体特性、海面的具体环境和人工的设定,由于对于船舶来说,其体积较大,航行过程中的速度,航向等特性变化率较低,因而使用门限的方法来控制更新的过程具有较好的效果。
此外,由于海上通信环境较为复杂,为了避免上传服务器的数据发生冲突,要求2 次更新时间必须大于3 s。
4 实验与仿真
4.1 仿真设计
为了证明本文提出的方案能够减少服务器与船舶之间的交互流量,并能达到较高的精确性,对本文所提出的方法进行仿真,并对结果进行分析。
首先,利用C++开发了船舶移动对象模拟模块,和能够存储相应数据的服务器,二者通过socket通信,仿真运行的环境为core i3 2.1GHz,2G,Win7 64 bit 计算机。
为了反映航行过程中的真实情况,使用了4 艘船舶的真实历史航行数据作为实验数据,相应的移动向量均有这些数据获得,实验结果如表1所示。

表1 实验结果Tab.1 The result of the simulation
表1 显示了在实验过程中,4 艘船舶在位置更新过程中,与服务器的流量交互情况。其中MMSI(Maritime Mobile Service Identity)为海上移动注册名,用来标识使用移动服务的用户名;下载数据为船舶从服务器中下载的数据,包括地图数据、水文数据等;上传数据为船舶在更新自身位置信息时,向服务器上传的数据,这些数据记录了船舶的航迹;节省流量比例是指在当前的通信频率下,与传统的导航信息更新机制相比,本文提出的方法所节省的流量比例。
在实验的4 艘船舶中,其中110603267的航行状态为正常行驶,不包含其他客观影响;123456778的航行状态为静止,并且由于海面的波动,位置有着轻微的变动;200804300的航行状态为时而静止,时而航行,二者交替进行;209075000的航行状态为正常行驶,但是有2个航行目标。
为了显示航迹信息的精确性,我们将比较船舶的实际航行轨迹与数据库记录数据之间的差别。
船舶的实际航信轨迹如图4所示,通过数据库中存储的移动对象信息还原出的船舶航迹如图5所示,在图中细小原点代表每次船舶更新位置信息时所在的点,也就是更新的移动向量,方形的点是标志点,当船舶的更新次数达到一定界限时,则标注一个标志点。
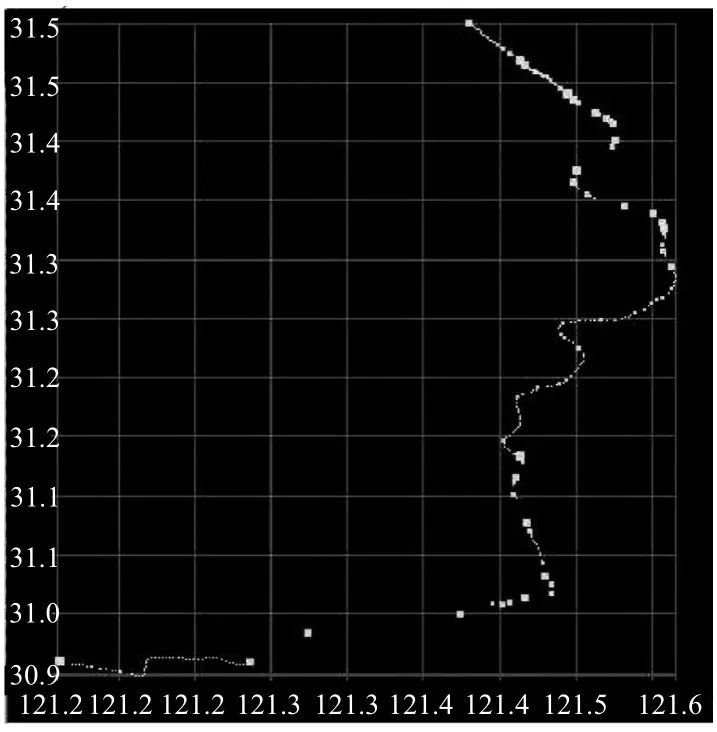
图4 船舶实际航迹图Fig.4 The real track of navigation

图5 数据库记录数据图Fig.5 The track of database records
4.2 结果分析
对比图4 与图5的航迹可以发现,导航信息的更新机制,过滤掉了一些不需要的点,同时能够较为精确将实际航迹进行还原。结合上文所述的算法机制,可知本文提出机制的精确性由算法中设置的位置、速度、时间门限决定,而这些门限的确定仍需要在下一步的工作中继续研究。
同时,根据本文设计的算法,由数据库记录所还原的航迹图像,其记录点的误差不会大于所设定的相应的门限值,说明了本文提出的方法具有较高的效率和较好的精确性。
5 结 语
移动对象数据库的相关研究已经趋于成熟,然而移动对象数据库的更新机制如何制定,仍然缺少相应的研究和实践。本文提出了一种基于移动向量和船舶导航信息的移动对象信息更新机制。这种方法通过对船舶航线的建模,设计了自动化的移动对象信息更新算法。通过仿真和实验,证明了本文提出的方法与传统的真实航线信息更新方法相比,具有更好的性能表现,能够在较低的系统开销下,实现较高的精确度。
在下一步的工作中,我们将根据船舶移动对象的特点,对海上移动数据更新、存储和查询,进行优化。设计和建立海事领域的移动对象数据,并通过高效的管理使之在更多的领域中发挥更大的作用。
[1]RALF H G,MARKUS S.Moving objects databases[M].USA:CRC Press,2007:15-18.
[2]许昭霞,王泽元.国外水下导航技术发展现状及趋势[J].舰船科学技术,2013,35(11):99-103.XU Zhao-xia,WANG Ze-yuan.Recent advances and future trends in foreign undewater navigation techniques[J].Ship Science and Technology,2013,35(11):99-103.
[3]陈启楠.舰船稳定性实时监测系统研究与设计[J].舰船科学技术,2011,33(S):59-65.CHEN Qi-nan.Research and design of monitoring system for ship stability[J].Ship Science and Technology,2011,33(S):59-65.
[4]DING Zhi-ming,CHEN Qi-nan,RALF H G.Managing moving objects on dynamic transportation networks[C]//Proceedings-16th International Conference on Scientific and Statistical Databse Management,SSDBM,2004.
[5]OURI W,YIN Hua-bei.Accuracy and resource consumption in tracking and location prediction[J].SSTD,2003(27):89-96.
[6]CHRISTIAN D,THOMAS B,RALF H G.BerlinMOD:a benchmark for moving object databases[J].The VLDB Journal,2009(18):1335-1368.
[7]DIETER P,CHRISTIAN S J.Capturing the uncertainty of moving-object representations[J].Lecture Notes in Computer Science,1999(3):111-131.
猜你喜欢
中学生数理化(高中版.高考数学)(2022年4期)2022-05-25
疯狂英语·新读写(2021年6期)2021-08-05
读友·少年文学(清雅版)(2020年4期)2020-08-24
儿童故事画报(2020年7期)2020-08-03
读友·少年文学(清雅版)(2020年3期)2020-07-24
小学科学(2020年6期)2020-06-22
青年歌声(2019年12期)2019-12-17
创新作文(1-2年级)(2017年7期)2017-12-26
北京航空航天大学学报(2017年7期)2017-11-24
北京航空航天大学学报(2016年7期)2016-11-16
