
一种嵌入式航海数据采集系统方案设计
2015-12-04 08:05黄孝平
舰船科学技术 2015年1期
黄孝平
(南宁学院机电与质量技术工程学院,广西 南宁530200)
0 引 言
近些年,分布式信号处理系统、Ad hoc 网络组网以及并行计算的发展,使得小型化分布式的无线传感网络[1-2](WSN)在数据采集系统中得到广泛应用。另一方面,虽然分布式的无线传感网络在电源供应、网络协议以及系统结构都进行了深入研究,但是其对于网络服务质量[3](QoS)仍然有较大的改进空间,如对数据采集精度、采集覆盖率以及采集系统的延迟时间等都有更高的要求。
舰船雷达是其航海重要辅助设备,其信号采集的及时性、准确性、高精度性直接关系到船舰的位置测定、运行中的碰撞、海面浮标的观测、以及与岸线的方位和距离等一系列目标参数,同时船舰数量的增加以及海面复杂多变的气候,更迫切的需要获知船舰周边的障碍物信息[4-5]以及当前的气候条件。所以,对船舰雷达数据的采集成为航海安全的关键,数据采集的实效性以及精确性也是船舰避免碰撞自动化系统的重要性能指标。
本文在分析了航海雷达数据特性以及最新的无线传感器组网数据采集系统的基础上,提出了一种新的组网方式以及采集汇聚算法,并基于DSP 芯片设计了嵌入式航海雷达数据采集系统,最后通过仿真,证明了该传感数据采集系统组网方式以及对应的算法满足雷达数据采集对实时性要求。
1 雷达数据采集整体系统
1.1 雷达数据采集原理
一个完整的雷达数据采样经过高频采样、量化、编码、A/D 转换最终经由无线传感网络传输。
式(1)是雷达数据采样最常用的平顶采样[6],其中采样脉冲宽度为τ,H(w)为采样滤波器的频域卷积值。经过式(1)采样后数值虽然在时间序列上是离散,但是在幅值上还是连续的,通过式(2)进行映射:

1)量化后信号与噪声比和参数N (量化间隔数)的平方成正比。
2)使用式(2)的过程中,通过信号的幅度范围以及信噪比参数确定N的选择。
3)当量化参数N 确定后,随着信号幅值的降低,对应的信噪比恶化与量化精度的降低。
量化后需要对其进行编码,本文使用双极性编码,公式如下:

其中vout为对应的量化信号an编码后的输出,最后经过双积分型A/D 转换器得到最后幅度与时序的离散信号,双击分形A/D 转换器原理如图1所示。
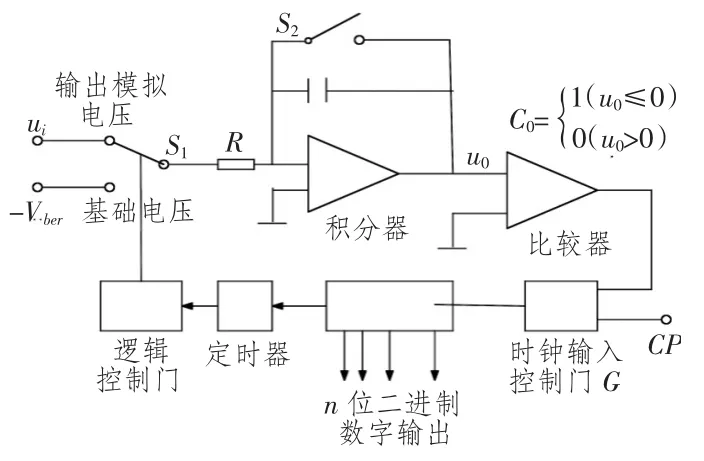
图1 A/D 转换器模拟图(双积分型)Fig.1 Structure of A/D (double integral)
双击分A/D 转换器对输入信号进行2 次积分,将模拟信号转换为二进制控制的数字信号。双积分型A/D 转换器具有输出信号精度高、且有较强的抗噪声性能,由于本文海面噪声、气候条件、以及反射折射等干扰,所以选用此类型A/D 转换器。
1.2 雷达数据采集系统结构
雷达数据采集系统接收从船舰信息控制中心发送的控制信息,并根据此信息按照不同的方式读取传感器经由无线网络发送的原始数据,并最终将所有信息发送到信息控制中心,整个船舰控制系统如图2所示。

图2 船舰信号采集控制总系统Fig.2 Ship data acquisition and control system
数据采集系统是信息控制融合中心数据获取准确信息的关键性所在,数据采集的精度以及传输性能决定了整个控制系统对船舰的指挥速度与准确性。
2 基于无线传感网络(WSN)的汇聚算法
2.1 线性WSN 网络雷达数据采集系统
线性WSN 网络雷达数据采集系统抽象图如图3所示。
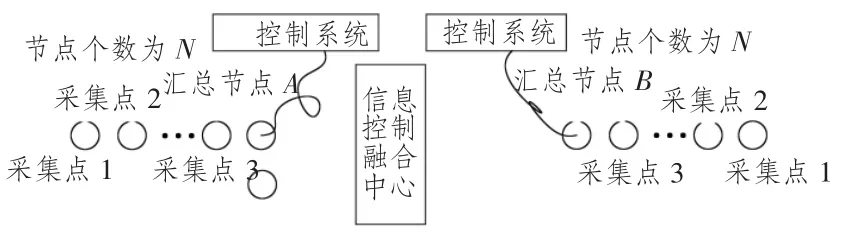
图3 单节点WSN数据采集逻辑图Fig.3 Logic diagram of WSN data acquisition based on single node
1)假设现在有2 组舰艇,网络拓扑结构如图3所示,信息控制中心与2 组舰队等距离,并且2 组舰队船舰数量相等,设都为N,每个舰船间距为30 m,则整个舰队的信息控制网络的总长度为60 km。
2)2个节点之间使用无线网络传输数据,整个系统组成一个自适应系统(Ad hoc)。传输协议使用通用的801.11 协议族。
3)数据采样使用式(1)中的平顶采样,经过量化后使用双极性编码方式,最终同样采用双极性A/D 转换电路转化为离散数字型号。
4)2 组船舰中每4个节点组成一簇。
5)整个雷达数据采集系统分为接收传感器数据前的控制阶段、接收传感器数据采集阶段以及采样后传输阶段。
6)在控制阶段,采集系统根据信息中心发送给控制系统中的控制位进行初始化。在第2 阶段,每组船舰的每个雷达节点产生一定长度头部传控信息(8 kb),在经由汇总节点组成簇数据,并分别传送各自的控制系统。
2.2 采集系统初始阶段
在本系统中,采集系统接收数据前,需要先接收控制系统发送的控制信息进行初始化,其目的在于节点之间的干扰信息以及用于对前采集数据的反馈,接收控制信息的初始化模型如图4所示。
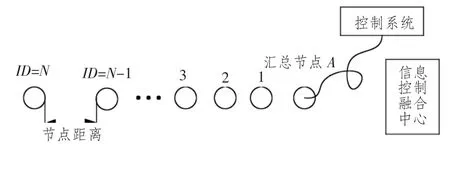
图4 汇聚算法初始化及自检逻辑图Fig.4 Logic diagram of initialization stage of data aggregating algorithm
汇总节点A 持续接收控制系统发送的控制探测帧(BPF),此后开始根据控制信息选择接收相应节点的数据采集信息,直到接收到最远端节点的反馈帧。其中控制帧(BPF)携带了选取节点的簇号,允许的最大节点ID和当前节点CN 号。
之后,汇总节点以一定的数据格式,如递推方式对节点ID,CN 以及簇号依次进行计算,并记录下此刻接收节点的功率等级,直至达到规定的最大等级数。
本系统采用了对节点ID 进行动态调整的方式,这样有效的降低了信号发射器的耗能量,下面讲述基于无线传感网络汇聚算法的数据采集阶段。
2.3 汇聚算法的数据采集阶段
系统初始化阶段完成后,进入到接收雷达信号的采集阶段,这一阶段的网络结构图如图5所示。

图5 汇聚算法数据采集阶段逻辑图Fig.5 Logic diagram of data acquisition stage of data aggregating algorithm
本系统中,我们假设一簇包含4个节点,则一组舰队簇的数量为M=N/4 ,N 为一族舰队总的节点数。则可以推算第j 簇中所包含的4个节点的序列号为:ID=(j-1)×4+1~j ×4,j=1,2,3…M。
下面介绍给出汇聚算法数据采集阶段的详细方案,步骤如下:
1)每一簇中的各节点作为一个整体,同一时刻采样自身的有效数据帧。
2)汇总节点收到有效数据帧时,判断它们的簇序号CN 是否相同,若相同,并且节点ID 号相匹配,则汇总节点反馈给控制系统采样信号正确,否则对接收信息过滤处理。
3)对于簇中的各个节点,收到汇总节点反馈的信号汇聚簇信息,解析其中的控制信号量,以便在控制下一次数据汇聚帧信息。
4)关于针对节点的纠错处理,对簇号为j 中的各节点ID=(j-1)×4+1~j ×4,j=1,2,3…M 在没有接收到同一个簇号中比自身ID 大的相邻节点发送的汇聚纠错帧信息时,启动自身定时器Time。在定时器有效时间内,如果还没接收到,则标记自身节点实效。
本采集系统的控制信息不在针对整个系统中的单节点进行控制,而是对舰队进行编号,并进行分簇处理,上述步骤可以推测,在同一簇中的舰队,只要其中2个或以上雷达数据汇总节点成功接收,即不影响整个系统的数据采集精度,有效的增加了系统的纠错能力。
3 基于DSP的嵌入式系统及仿真分析
3.1 DSP 嵌入式系统结构
本系统基于型号为TMS320VC5402DSP 作为采集系统的核心处理器以及信号控制器,系统的A/D 转换器采用低噪声源模数转换,型号为A/D380,采用双极性四阶差分调制器转换模拟脉冲信号。通过DSP的数据采集信号经过串口接发起(异步)16D340 进行处理的接收发送,整个嵌入式仿真图如图6所示。
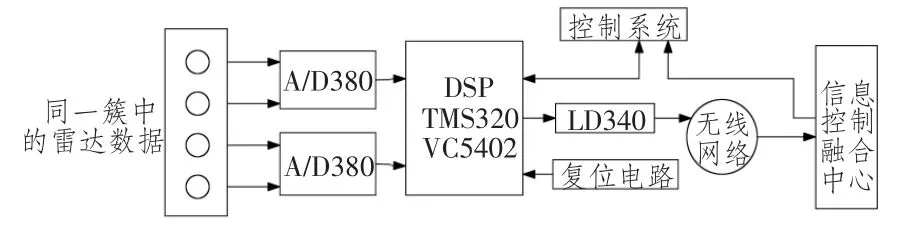
图6 基于DSP的嵌入式仿真系统Fig.6 Embedded simulation system based on DSP
由图6 可知,A/D 转换器以及DSP 对数字信号的采样处理是针对整个簇汇聚信号的实时处理,有效降低了系统的复杂度。3.2 节将设置一定的簇数以及每个簇中节点数,对系统进行仿真。
3.2 仿真结果及分析
用于仿真的参数如表1所示,并且对参数的设置满足无线传输模型[7-8]。表中衰落参数Ω 是此仿真模型相对节点距离的衰减,其满足标准方差方程。

表1 仿真参数的设置Tab.1 Simulation parameters
系统设置每簇4个节点到达汇总节点所用时间为t。通过无线传输网络衰落的传输速率为R。则t可用式(3)表示:

当R=300 kb,通过上式可得出t=0.047 5 s。
图7 为显示了随着R的变化,基于DSP的嵌入式数据采集系统对每簇汇聚数据的处理时间变化率。

图7 达到汇总节点汇聚时间曲线图Fig.7 Curve graph of convergence time arrived sink node
图7 可看到在实际应用中,雷达数据采集系统无线传输速率R=500 kb 附近,则针对每簇汇聚数据的接收时长仅为0.1 s 左右。
另外一个数据采集系统的性能参数是对于整个模型的数据采集最大延迟时间,在本算法中,即为距离最大的簇中每个节点到达汇总节点的帧延迟,用Td表示。在本仿真中,节点之间的距离设为30 m,数据采集系统的有效传输速率平均为500 kb左右,则整个数据系统的采集延迟最大仅为1.5 min。最大数据延迟仿真如图8所示。
4 结 语

图8 系统最大延迟时间Fig.8 The maximum delay time of this system
本文在研究了以往航海舰队雷达数据采集系统组网以及逻辑结构基础上。利用簇的概念,设计了一种针对船舰编队的数据采集汇聚算法。簇中的船舰节点之间使用无线网络感应,成为整个采集系统的一个簇节点,而每组舰队的汇聚节点针对每簇汇聚数据进行采集汇总,最后设计了基于DSP的嵌入式仿真系统,通过验证,证明了系统对于整个数据采集系统的数据汇聚时间以及最大延迟时间得到有效提高,有效验证了本组网方式以及汇聚算法对整个船舰雷达系数据采集系统的有效性。
[1]AKYILDIZ I F,SU W,SANKARASUBRAMANIAM Y,et al.A survey on sensor networks[J].IEEE Communications Magazine,2002,40(8):120-114.
[2]KARL H,WILLIG A.A short survey of wireless sensor networks,TKN- 03- 018[R].Technical University Berlin,Telecommunication Networks Group,2003.
[3]YEONJOON C,MIN H P,EUI H P.A QoS negotiable service framework for multimedia services connected through subscriber networks.Consumer Electronics,2006.ISCE ′06.2006 IEEE Tenth International Symposium on DOI:10.1109/ISCE.2006.1689454
[4]COLE S N.Enviroment and radar operation simulator[J].IEE Proceedings-F,1985:594-599.
[5]HORST M M,DYER F B,TULEY M T.Radar sea clutter dmodel,int.Conf.on Antennas and propagation[J].IEE Conf.Pub,1978,20(2):20-22.
[6]包象阳.雷达中频数字接收机的研制[J].电子科技大学学报,2003,33(2):135-138.
[7]YUEN K,BEN L,LI Bao-chun.A distributed framework for correlated data gathering in sensor networks[J].Vehicular Technology,IEEE Trans,2008,57(1):578-593.
[8]RACHAVAN R S.A.Model for spatially correlated radar clutter[J].IEEE Transactions On AES,1991,27(2):268-273.
[9]SWERLING P.Probability of detection for fluctuating target[J].IRE Prof.Group on Information Theory,1960,6(2):269-308.
猜你喜欢
医药与保健(2022年2期)2022-04-19
家庭影院技术(2021年7期)2021-08-14
源流(2021年1期)2021-07-28
中学生数理化·高一版(2021年2期)2021-03-19
电子制作(2019年15期)2019-08-27
电子制作(2019年7期)2019-04-25
小学生学习指导(低年级)(2018年12期)2018-12-29
电子制作(2018年16期)2018-09-26
上海人大月刊(2017年9期)2017-10-11
电子制作(2017年8期)2017-06-05
