
后轮随动转向技术应用研究综述*
2016-08-12 06:50徐晓美陈宁HLee南京林业大学南京10037新加坡国立大学新加坡117575
汽车技术 2016年7期
徐晓美陈宁H.P.Lee(1.南京林业大学,南京 10037;.新加坡国立大学,新加坡 117575)
后轮随动转向技术应用研究综述*
徐晓美1,2陈宁1H.P.Lee2
(1.南京林业大学,南京 210037;2.新加坡国立大学,新加坡 117575)
【摘要】在阐述后轮随动转向技术原理与实现方式的基础上,从悬架衬套研究、后轮随动转向车辆的横向稳定性研究以及后轮随动转向技术在大型车辆上的应用研究3个方面,系统地分析了随动转向技术的研究现状及存在的不足,指出了目前应用于悬架系统的橡胶衬套与液压衬套研究中尚需进一步考虑的问题,以及结合磁流变液或磁流变弹性体等智能材料衬套开展车辆智能化时后轮随动转向的研究方向。
主题词:后轮转向随动转向悬架衬套横向稳定性智能材料
1 前言
早在20世纪70年代,人们就开始关注悬架系统的“Compliance”对车辆操纵稳定性的影响[1]。“Compliance”是由于外力作用而引起的物体变形,如弹簧、稳定杆、衬套等的受力变形,其被国内学者译作“顺从性”,简称C特性。近年来,随着人们对汽车乘坐舒适性要求的提高,弹性衬套被广泛应用于汽车悬架系统中,由衬套弹性所引起的悬架C特性对车辆操纵稳定性的影响也受到人们越来越多的关注。
后轮随动转向技术是一种无需转向机构的被动转向技术,它利用车辆弯道行驶时车轮受到的侧向力和后悬架的侧向弹性实现后轮转向[2]。后轮随动转向技术的实质是对悬架C特性的合理利用。通过合理匹配后悬架结构和布置方式,在中、高速工况使两轴车辆的后轮相对前轮同向转动,从而减小车辆的质心侧偏角和横摆角速度,提高车辆的操纵稳定性。
目前,后轮随动转向技术已在多数轿车上得到了应用[3~6],随着磁流变液与磁流变弹性体等智能材料的出现,该技术存在向客车、货车、拖挂车等领域推广应用的可能。因此,剖析后轮随动转向技术的应用研究现状及存在的问题、探讨其结合智能材料技术在车辆上的新型应用,对低成本、高可靠性地实现车辆四轮转向和多轴转向的半主动控制以及提高车辆的操纵稳定性和轨迹追踪性具有重要的理论意义和实践价值。论文基于后轮随动转向技术的原理及实现方式,综述其应用研究现状,分析当前应用研究中尚需进一步深入研究的问题,并结合智能材料的研究指出后轮随动转向技术的应用研究方向。
2 技术原理及实现方式
后轮随动转向技术最早应用于轿车的扭力梁式悬架[3~5]。对于扭力梁式悬架,通过在车辆后轴与车身间巧妙设置橡胶垫块来实现随动转向,如富康系列轿车、爱丽舍系列轿车、桑塔纳一、二代轿车、德国大众公司的Golf IV、Bora和Audi A3等车型皆通过此方式实现后轮随动转向。这些实现方式的共同点在于:连接车轴与车身的前橡胶垫块相对于后轴倾斜布置,其各向弹性不同,由此使后轴相对车身的转动中心后移,从而在车轮所受侧向力作用下产生随动转向效应。图1为文献[3]所述富康轿车后轴管架上橡胶垫块的布置示意图,前橡胶垫块1、2与后轴轴套成45°布置。假设汽车向左转弯,车轮所受侧向力Fy也指向左方。由于前橡胶垫块的A-A方向有弹性,B-B方向为刚性,因此它们只能在A-A方向运动,其瞬时速度中心交于O点。O点位于车轮后端,与车轮所受侧向力作用点有一偏距e,故而整个后轴在侧向力Fy作用下将逆时针方向转动,即后轮与前轮同向偏转,这使得车辆的不足转向趋势增强。
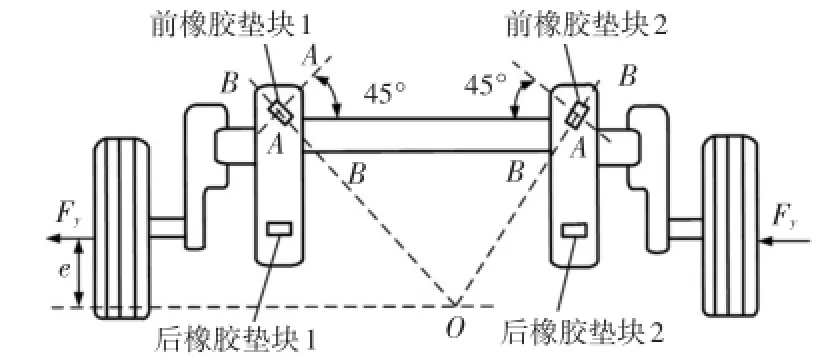
图1 橡胶垫块布置示意
对于双横臂式悬架,其后轮随动转向是通过A字型控制臂与车身相连处前、后端橡胶衬套的刚度差异实现的。
多连杆式悬架源于双横臂式悬架,其通过布置在空间的3~5根连杆连接车轮托架与车身,连杆内、外端都采用球铰或橡胶衬套圆柱铰连接,因此其一般利用橡胶衬套的弹性变形及相关杆件的合理布置来实现后轮的随动转向[6~9]。
图2为文献[6]所述某型车辆的五连杆后悬架后轴随动转向原理图。左、右下纵拉杆EF、GH平行于汽车纵轴前进方向;斜置上拉杆AC与BD的交点即为后悬架的横摆转动中心O,O点到后轴中心线的距离为e;横向推力杆JK位于轴后方,其J端和K端分别通过橡胶衬套与后轴和车体相连。文献[6]研究表明,横向推力杆衬套的径向刚度很大,约为斜置上拉杆衬套径向刚度的5倍,其在转弯工况下承受主要的横向力。当车辆左转弯时,车轮所受侧向力Fy将使后轴绕O点向左转动,即后轮发生随动转向。研究表明[8]:横向推力杆的前后布置决定了后轴随动转向特性;斜上拉杆的位置影响整车的后轴随动转向特性。

图2 五连杆后悬架后轮随动转向原理
从上述扭力梁式悬架、双横臂式悬架以及多连杆式悬架的后轮随动转向实现方式可以看出,尽管其实现方式会因后悬架形式不同而有所不同,但其技术原理是一致的:通过车轴与车身连接结构的精心设计,使后轴相对车身的转动中心后移,利用弯道行驶时车轮所受的侧向力,使后轴相对车身产生一定角度的转动,继而带动后轮转向。
3 研究现状
对于后轮随动转向技术的应用研究现状,从悬架衬套的研究、随动转向车辆横向稳定性的研究以及后轮随动转向技术在大型车辆上的应用研究这3个方面进行阐述。
3.1悬架衬套研究
随着车辆性能的不断提高,影响车辆操纵稳定性、平顺性等性能的重要因素越来越多地集中到悬架系统中。已有的研究表明[3],悬架衬套的弹性特性对悬架系统性能及车辆的操纵稳定性具有重要的影响,也是实现后轮随动转向的关键。
悬架衬套传递着车身和悬架导向机构间的3个轴向力Fx、Fy、Fz和3个扭转力矩Tx、Ty、Tz,如图3所示[9]。在这些力和力矩的作用下,悬架衬套将产生6个方向的变形,相应地存在6个方向的刚度。
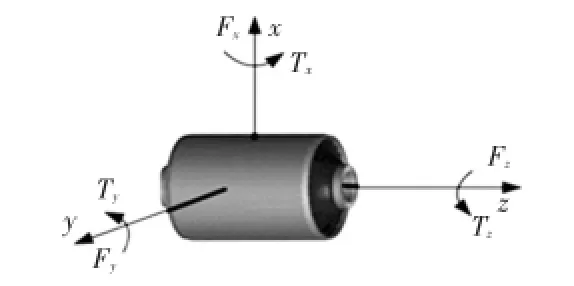
图3 悬架衬套的受力
当前,汽车悬架系统中广泛使用橡胶衬套。现有研究文献分别从橡胶衬套刚度特性对悬架性能与操纵稳定性的影响、橡胶衬套的建模方法以及非对称式橡胶衬套设计等角度进行了研究。
在橡胶衬套刚度特性对悬架与操纵稳定性的影响研究方面,文献[10]从理论上阐明了悬架橡胶衬套刚度特性对整车稳态转向特性的影响机理,并通过仿真研究表明,调整橡胶衬套刚度可以控制车轮前束变化,从而可使整车转向特性得以改善。文献[11]研究了多连杆式悬架的下控制臂外侧橡胶衬套刚度对悬架性能的影响。文献[12]则研究了橡胶衬套刚度对汽车横摆响应的影响。文献[11]和[12]的研究皆表明,橡胶衬套各个方向的刚度对悬架性能和汽车横摆响应的影响程度各不相同,衬套轴向刚度几乎没有影响,径向刚度对二者的影响相对较大。文献[13]研究了橡胶衬套刚度对悬架C特性和整车瞬态操纵稳定性的影响,得出了不同加载工况下悬架的C特性指标与悬架衬套刚度间的关系,同时阐述了衬套刚度对瞬态响应指标影响的内在规律。文献[14]则研究了橡胶的C特性对所提出的悬架弹性运动模型的影响。
在橡胶衬套的建模方法研究方面,文献[15]研究了在ADAMS软件中悬架橡胶衬套的建模方法以及橡胶衬套的弹性特性对悬架运动特性的影响。研究表明,悬架设计的优劣以及汽车操纵稳定性等复杂仿真研究结果的准确性将越来越依赖于橡胶衬套的性能描述。文献[16]建立了适用于多体动力学分析的橡胶衬套本构关系模型。文献[17]则基于柔性多体系统动力学思想,提出了一种考虑衬套在不同方向刚度耦合的新柔性体橡胶衬套模型。
为获得理想的悬架弹性运动学特性,非对称式橡胶衬套被引入到悬架系统中。文献[18]仿真研究了橡胶衬套的材料属性及安装方向对悬架弹性运动性能的影响。文献[19]研究了一种在轴向和对称径向存在弹性耦合特性的非对称式橡胶衬套。研究结果表明,非对称式橡胶衬套能够使车辆在中高速时产生随动转向,提高汽车的操纵稳定性。文献[20]则通过优化后轴橡胶衬套在各个方向的刚度和衬套安装角度来改善车辆的不足转向特性。
由于液压衬套能同时抑制低频抖动和高频振动,这是传统橡胶衬套无法实现的。因此,近年来液压衬套被逐渐引入到悬架系统中。但因液压衬套中存在液体与结构的耦合作用,其动态特性具有较明显的非线性特性,因此现有对液压衬套的研究多数是针对其动态特性展开的[21~23]。文献[21]在AMESim软件中建立了液压衬套的液固耦合模型,通过试验验证了模型的有效性,并基于此模型研究了液压衬套相关参数对其动态特性的影响。文献[22]提出了一种基于有限元和计算流体动力学的方法,预测了液压衬套的动态刚度。文献[23]则研究了一种关注内部液流通道特性的液压衬套的非线性动力学特性。总之,关于液压衬套的研究目前还有许多不完善之处,有关液压衬套对悬架性能及操纵稳定性影响的研究文献尚不多见。
随着智能材料的出现,悬架衬套开始向智能化方向发展。智能悬架衬套能根据衬套使用工况主动地调节悬架衬套各个方向的刚度,从而改变悬架机构的运动和车辆的横向稳定性。磁流变智能衬套被誉为“下一代汽车悬架衬套”[24]。虽然磁流变减振器在半主动振动控制领域已取得了很大的应用研究进展,磁流变弹性体的研究也日益丰富,但是关于磁流变智能衬套的研究尚处于起步和试验研究阶段。
磁流变智能衬套通过改变外加励磁电流来改变励磁磁场,从而改变衬套的刚度或阻尼。文献[24]提出了一种刚度、阻尼皆可调的磁流变液衬套,并对其动态刚度特性和阻尼特性进行了研究。研究结果表明,该衬套具有良好的刚度、阻尼和频率调节特性。文献[25]研究了一种可用于悬架系统的磁流变弹性体衬套,其剖面如图4所示。该衬套的内套管凹槽内绕有励磁线圈,内、外套管由低碳钢制成以减小磁阻,磁流变弹性体位于内、外套管间,在V向相对两侧各挖去一部分弹性体以使衬套径向刚度、阻尼不对称。研究表明,该磁流变弹性体衬套的径向刚度和阻尼都比其轴向值大得多,且均随励磁电流的增加而线性增加。由于V向弹性体被挖去一部分,其V向刚度和阻尼皆小于NV向。文献[26]、文献[27]则对磁流变液在变排量发动机悬置方面的应用作了较系统的研究。目前,传统发动机的悬置多为橡胶悬置,而变排量发动机在某缸或某几缸突然停止工作时,除了改变发动机振动的幅值和模态,还将引起高的瞬态扭转载荷,为此需对其悬置进行刚度可控设计。理论研究表明,磁流变液悬置能满足其对悬置刚度可控的隔振要求。

图4 磁流变弹性体衬套剖面[25]
综上可见,目前国内外对悬架衬套的研究内容日趋丰富,已不局限于单一讨论其刚度特性对汽车悬架性能或操纵稳定性的影响。在理论分析与仿真研究中,悬架各杆件间的连接以及其与车轮或车身间的连接已不再被看作刚性连接,橡胶衬套的非线性特性已被引入到各种研究中。但不论磁流变液衬套还是磁流变弹性体衬套,其相关技术目前还都处于理论与样品试验研究阶段。
3.2横向稳定性研究
前已述及,后轮随动转向的目的是使车辆在转弯时总是处于不足转向状态,从而改善车辆的操纵稳定性。但随动转向角是否越大越有利于提高车辆的横向稳定性,或者随动转向角应该控制在什么范围内才能有效提高车辆的横向稳定性?车辆的横向稳定性受到哪些随动转向参量的影响?如何影响?诸如此类的有关随动转向车辆稳定性问题也已得到研究人员的关注。
文献[3]、文献[4]从当量侧偏角的角度讨论了随动转向车辆的横向稳定性问题。文献[3]定义当量侧偏角为车辆中心线与后轴速度方向的夹角,其在数值上等于后轮侧偏角减去后轴转向角(即随动转向角)。文献[3]认为后轮当量侧偏角越小,车辆的不足转向趋势越明显,但当后轮当量侧偏角过小以至改变符号时将造成车辆横向不稳定。可见,并非随动转向角越大越有利于提高车辆的横向稳定性。
文献[28]引入随动转向系数Rcs的概念来分析车辆的稳定性。随动转向系数Rcs为:

式中,Cr为两后轮侧偏刚度之和;dcs为后轮轮心到后轴摆动中心的距离;Kcs为随动转向角刚度。
分析指出,随动转向系数Rcs小于1的车辆未必稳定。如图5所示:在低速区,随动转向环节的阻尼比ζcs对随动转向系数Rcs的稳定界限起着决定性作用;而在高速区,随动转向环节的阻尼比ζcs对随动转向系数Rcs稳定界限的影响要小得多。由于随动转向系统的阻尼一般较小,故而为确保车辆系统具有足够的稳定裕度,随动转向系数Rcs应取为0.15~0.2。
文献[29]通过建立后轮随动转向系统的分数阶微分动力学方程,仿真研究了随动转向角刚度对后轮随动转向角和整车横摆角速度的影响。研究结果表明,若后轮与前轮同向转动,当随动转向角刚度处于某一范围时,车辆的横向稳定性将得到有效改善。随动转向角刚度过大将导致随动转向角过小,对改善车辆横向稳定性的效果甚微;随动转向角刚度过小将导致随动转向系统响应变慢。后轮与前轮反向转动时,若随动转向角刚度过小,随动转向系统将产生自激振动,并引起后轮摆振,严重时将导致车辆失稳。

图5 随动转向系数的稳定界限
可见,随动转向角刚度以及在低速区的随动转向环节阻尼比对随动转向车辆的横向稳定性影响较大。但由于目前悬架衬套主要使用阻尼较小、刚度不可调的橡胶衬套,为确保车辆的行驶稳定性,随动转向角刚度的可变范围较窄,其值一般不低于后轮的侧偏刚度。后轮的随动转向角一般不超过5°,它类似于四轮转向车辆在高速行驶时,后轮相对前轮同向转过的角度。
3.3在大型车辆上的应用研究
目前随动转向技术在大型车辆上的应用研究尚不多见。包括拖挂车辆在内的大型车辆在道路行驶中面临的主要问题是高速行驶稳定性较差、低速行驶轨迹跟踪性不佳。针对此类问题,研究人员一直尝试从多轴转向的角度加以解决。最初的解决方案是使车辆中、后轴或挂车车轴被动转向[30,31]。Aurell与Edlund研究了被动转向轴位置对拖挂车行驶稳定性的影响[30]。Jujnovich 与Cebon比较了各种挂车被动转向系统的性能[34]。研究发现[31],被动转向系统能有效改善低速行驶时车辆的轨迹跟踪性,但却无法提高车辆高速行驶时的稳定性。
将随动转向技术应用于大型车辆的初衷是效仿轿车的后轮随动转向,以提高车辆高速行驶稳定性。文献[32]在2轴公共汽车上,通过改变传统悬架连接点的位置,构造了后轮随动转向效应。理论计算与实车试验结果皆表明,后轮随动转向技术有助于提高车辆的直线行驶稳定性。该技术后来被应用到日野超高双层巴士上。
从运动学角度分析可知,若全拖挂车后轮产生与转弯方向相反的小角度转动,则可提高挂车的轨迹跟踪性,削弱挂车与牵引车之间的横向干涉。基于此,本文作者通过建立随动转向拖挂车辆的运动学与动力学方程,运用MATLAB软件仿真研究了挂车的轨迹追踪性及整车的横向稳定性。图6为挂车后轮随动转向系统的结构示意图,FY4为挂车左后轮的侧偏力。图7a为全拖挂车的运动轨迹,图7b为牵引车与挂车铰接点处的横向力随时间的变化情况,图中1表示挂车无随动转向,2表示挂车有随动转向。

图6 挂车后轮随动转向系统结构示意

图7 全拖挂车后轮随动转向仿真分析
由图7可见,后轮随动转向的挂车具有更好的轨迹跟踪性能,牵引车与挂车铰接点的横向力显著降低,这使得车辆铰接引起的相互干涉大幅减小。研究还表明,在中低车速(10 m/s)下,挂车后轮随动转向使全拖挂车具有更好的操纵稳定性。
4 研究与发展趋势
不难看出,后轮随动转向技术在轿车上的应用已成为轿车悬架设计的一部分。但目前的后轮随动转向系统转向角刚度不可调,其对车辆横向稳定性的改善效果有限,并且当相关参数发生变化或行驶状况复杂时,有时不但不能达到期望的优化效果,甚至会恶化转向特性,导致车辆丧失稳定性。
智能材料的出现,使得随动转向角刚度的调控成为可能,也使得该技术向大型车辆推广应用成为可能。因此,后轮随动转向技术未来有望在以下几方面得到进一步的研究和应用。
a.悬架橡胶衬套性能衰退问题研究
前已述及,悬架橡胶衬套的性能对随动转向效果影响较大。橡胶材料配方工艺不同,其耐磨性能和抗老化性能也不同。文献[33]仿真研究了悬架系统中的橡胶衬套与减振器性能衰退对车辆操纵稳定性和行驶安全性的影响。研究结果表明,性能衰退的橡胶衬套对车辆的横向稳定性和制动性能的影响较为明显。因此,对于目前大量应用于悬架系统中的橡胶衬套,应重视其因老化和磨损或因极端温度变化而引起的橡胶性能改变,并且有必要研究这种性能改变对悬架性能和车辆稳定性的影响。
b.悬架液压衬套对横向稳定性的影响研究
液压衬套正越来越多地被应用于汽车上,目前对其的研究主要基于减振要求展开,研究内容侧重于液压衬套的结构设计和动态特性。与后悬架中的橡胶衬套一样,后悬架系统中的液压衬套,不仅会影响车辆的平顺性,其对车辆的转向特性和横向稳定性的影响也值得关注,而目前关于这方面的研究还不多见。
c.智能随动转向系统结构设计
不管是磁流变弹性体衬套,还是磁流变液衬套,目前对其的研究都集中在衬套本身的结构设计和性能调节方面,鉴于这种智能衬套本身尚不成熟的实现技术和较高的研制与使用成本,对其在车辆悬架系统中的应用研究尚未得到开展。但日本山形大学的研究小组于2011年研制出了一种磁流变弹性体,在不同磁场强度下其硬度可相差180倍,直径35 mm,高50 mm的橡胶圆柱体,在磁场作用下足够承受80 kN以上的压力。可见,磁流变弹性体衬套的技术正在不断进步,技术性能正在得到改善。若将刚度、阻尼皆可调的智能衬套应用于悬架系统,由此构成的智能随动转向系统的角刚度和阻尼皆可调控,这将有利于车辆多种性能的提高。因此,为推动随动转向技术的智能化发展,在研究智能衬套自身结构和性能的同时,需要加强其在悬架系统中的应用研究。
d.智能随动转向系统半主动控制策略研究
智能随动转向系统的半主动控制策略因控制目标不同而不同。
对于轿车,引入后轮随动转向的目的是在不降低平顺性的前提下,提高车辆的操纵稳定性。因此,轿车智能随动转向系统控制策略的设计应以平顺性和操纵稳定性为主要控制目标。
对于大型拖挂车,其道路行驶中面临的主要问题是高速行驶稳定性较差、低速行驶轨迹跟踪性不佳,对于此类问题,目前主要是通过多轴主动转向来解决的[34]。主动转向效果诚然比较理想,但随着拖挂车辆向多轴化方向发展,其控制策略势必变得越来越复杂,控制系统的可靠性、技术成本等问题都会接踵而至。而智能随动转向技术为这些大型拖挂车辆低成本、高可靠性地实现多轴转向提供了可能。因此,多轴拖挂车的智能随动转向应以车辆高速行驶的稳定性和低速行驶的轨迹追踪性为控制目标,综合设计随动转向的半主动控制策略。
对于3轴车辆,其随动桥一般都采用液控或电控主动转向,或借助于主销后倾或主销相对于车轴向前偏置等方式实现被动转向,目的是减小随动桥车轮的非正常磨损。因此,应用于其上的智能随动转向技术应以低速行驶的轨迹追踪性为主要控制目标,并兼顾高速行驶的稳定性。
总之,智能材料的出现使得后轮随动转向技术正在向智能化方向发展。与橡胶衬套和液压衬套相比,虽然目前磁流变智能衬套在技术和成本上还不具优势,但其刚度、阻尼皆可调的特性决定了其未来在随动转向系统中的应用趋势。
参考文献
1Bergman W.Effects of Compliance on Vehicle Handling Properties.SAE Paper,700369.
2殷承良.汽车随动转向技术的设计、分析及其高速操稳性能评价研究:[学位论文].长春:吉林工业大学,2000.
3郭孔辉,殷承良.随动式悬架转向原理及操纵稳定性分析.汽车工程,1997,19(6):321~324,341.
4杜胜品,孔建益,果继辉.轿车后桥的随动转向分析.中国机械工程,2004,15(11):1026~1029.
5Mou Xiangdong.The Preliminary Study of Side Leans Steer⁃ing the Characteristic to Passenger Vehicle Compliance Sus⁃pension.SAE Paper,2007-01-3639.
6潘筱,王冬成,林逸,等.用多体动力学方法分析五连杆非独立后悬架的随动转向特性.汽车工程,2013,35(4):331~335.
7Souharda R.Compliant Multi-link Vehicle Suspensions. South Carolina:Clemson University,2008.
8王贺丰,李中好.五连杆整体桥的轴转向特性动力学分析.计算机辅助工程,2013,22(增刊1):149~153.
9潘筱,林逸,陈潇凯,等.五连杆非独立后悬架弹性转向特性.西南交通大学学报,2012,47(3):477~483.
10杨树凯.橡胶衬套对悬架弹性运动与整车转向特性影响的研究:[学位论文].长春:吉林大学,2008.
11Liu Xintian,Li Peiqi,Zhao Lihui,et al.Influence of Outer Rubber Bushing Stiffness of the Under Control Arm on Multi-link Independent Suspension Performance.2011 Third International Conference on Measuring Technology and Mechatronics Automation,New York,2011.
12Gao Xiang,Jiang Dong,Wang Yinxiao.The Research of Ef⁃fects of Suspension Bushing Stiffness on Vehicle Yaw Re⁃sponse Performance.2011 International Conference on Electric Information and Control Engineering,New York,2011.
13高晋,杨秀建.衬套刚度对悬架C特性及瞬态操纵稳定性的灵敏度研究.汽车技术,2013(11):33~37,42.
14Ticã M,Dobre G,Mateescu V,et al.Influence of Compli⁃ance for an Elastokinematic Model of a Proposed Rear Sus⁃ pension.International Journal of Automotive Technology,2014,15(6):885~891.
15Blundell M V.The Influence of Rubber Bush Compli⁃ance on Vehicle Suspension Movement.Materials and De⁃sign,1998(19):29~37.
16Ambrósio J,Verissimo P.Improved Bushing Models for General Multibody Systems and Vehicle Dynamics.Multi⁃body System Dynamics,2009(22):341~365.
17郑松林,顾晗,冯金芝,等.柔性体衬套模型对四连杆悬架K&C特性的影响.汽车工程,2012,3(48):723~726.
18Ji Peng,Lu Pingping,Hai Chenguang.Analysis on Influ⁃ence of Suspension Compliance Characteristics by Unsym⁃metrical Rubber Bushing.2010 2nd International Confer⁃ence on Computer Engineering and Technology,New York,2010.
19郭孔辉,王爽,丁海涛,等.后悬架非对称式橡胶衬套弹性耦合特性.吉林大学学报(工学版),2007,37(6):1225~1228.
20Khaknejad M B,Khalaj A,Keshavarz A,et al.Improving Understeering Behaviour of a Passenger Car via Rear Axle Bushing Optimisation.SAE Paper,2013-01-0700.
21马天飞,刘亚川,乔雪冰.悬架液压衬套的液固耦合建模及动态特性分析.中国机械工程,2013,24(7):857~861.
22Gil-Negrete N,Rivas A,Vinolas J.Predicting the Dynamic Behaviour of Hydrobushings.Shock and Vibration,2005,12(2):91~107.
23Chai T,Dreyer J T,Singh R.Nonlinear Dynamic Properties of Hydraulic Suspension Bushing with Emphasis on the Flow Passage Characteristics.Proceedings of the Institu⁃tion of Mechanical Engineers Part D:Journal of Automo⁃bile Engineering,2015,229(10):1327~1344.
24Piquet B,Maas C A,Capou F.Next Generation of Suspen⁃sion Bushings:Review of Current Technologies and Expan⁃sion Upon New 3rd Generation Product Data.SAE Paper,2007-01-0850.
25Ginder J M,Nichols M E,Elie L D,et al.Controllable-stiff⁃ness Components Based on Magnetorheological Elasto⁃mers.SPIE's 7th Annual International Symposium on Smart Structures and Materials,United States,2000.
26Arzanpour B,Golnaraghi M F.A Novel Semi-active Mag⁃netorheological Bushing Design for Variable Displacement Engines.Journal of Intelligent Material Systems and Struc⁃tures,2008,19(9):989~1003.
27Schubert B B.Development of a MR Hydraulic Bushing for Automotive Applications.Ontario:University of Waterloo,2005.
28李铂,陈善华.随动转向的分析与综合方法研究.汽车工程,2006,28(9):829~833.
29Wang Yu,Chen Ning,Tian Jie,et al.Handing Performanc⁃es of Vehicle with a Fractional Compliant Rear-wheel Steering System.2014 International Conference on Frac⁃tional Differentiation and Its Applications,New York,2014.
30Aurell J,Edlund S.The influence of steered axles on the dynamic stability of heavy vehicles.SAE Paper,892498.
31Jujnovich B,Cebon D.Comparative Performance of Semitrailer Steering Systems.Proceedings of 7th International Symposium on Heavy Vehicle Weights and Dimensions,Delft,2002.
32Fujio M,Kiyoaki M.Compliance Steer and Road Holding of Rigid Rear Axle for Enhancing the Running Straightness of Large Sized Vehicles.SAE Paper,933009.
33Vaculín O,Steinbauer P,Svoboda J.Influence of Sus⁃pension Component Deterioration on Vehicle Handling. Computational Mechanics,2006(11):649~656.
34Johannes S.Lateral Dynamics of Multiaxle Vehicles.Stutt⁃gart:University of Stuttgart,2013.
(责任编辑斛畔)
修改稿收到日期为2016年1月6日。
中图分类号:U463.42
文献标识码:A
文章编号:1000-3703(2016)07-0001-06
*基金项目:江苏省博士后基金项目(1402084C);江苏省自然科学基金项目(BK20130977)。
A Review on the Applied Research of Rear Wheel Compliance Steering
Xu Xiaomei1,2,Chen Ning1,H.P.Lee2
(1.Nanjing Forestry University,Nanjing 210037;2.National University of Singapore,Singapore 117575)
【Abstract】Firstly,the principle and implementations of rear wheel compliance steering technology(RWCST)are introduced.Then research status as well as shortcomings of RWCST are analyzed systematically from three aspects,i.e.,suspension bushing,lateral stability of the vehicles with RWCST,and the application of RWCST in large sized vehicles. Finally,the issues to be further considered in the application research of rubber bushing and hydraulic bushing in suspension system are summed up,and the research trend of bushing made of smart materials,which combine magnetorheological fluids or magnetorheological elastomers,in the rear wheel appliance steering for intelligent vehicles are also identified.
Key words:Rear wheel steering,Compliance steering,Suspension bushing,Lateral stability,Smart material
猜你喜欢
汽车维护与修理(2022年5期)2022-09-06
汽车实用技术(2022年14期)2022-07-30
资源信息与工程(2021年5期)2022-01-15
汽车零部件(2021年7期)2021-07-29
少儿科学周刊·少年版(2020年9期)2020-03-04
小学生学习指导·爆笑校园(2019年6期)2019-09-10
汽车实用技术(2018年20期)2018-10-26
科技与创新(2018年10期)2018-05-23
民用飞机设计与研究(2018年1期)2018-05-04
汽车维护与修理(2017年1期)2017-09-22
