
基于ADAMS/View的虚拟振动台的标定方法研究
2016-08-12 06:50陈彦龙杨啟梁胡溧龚亚奇武汉科技大学武汉430081
汽车技术 2016年7期
陈彦龙 杨啟梁 胡溧 龚亚奇(武汉科技大学,武汉 430081)
基于ADAMS/View的虚拟振动台的标定方法研究
陈彦龙杨啟梁胡溧龚亚奇
(武汉科技大学,武汉 430081)
【摘要】在ADAMS/View中创建虚拟振动台进行平顺性仿真分析时,需要对虚拟振动台进行标定。针对某6×4重型牵引车,通过分析虚拟振动台振动系统传递特性与目标传递特性之间的误差,提出了一种对虚拟振动台输入位移信号进行频率滤波的标定方法,并基于Butterworth低通滤波器产生了用于标定的滤波函数。通过与实车测试数据对比可知,整车激振系统标定后车桥轴头仿真垂直加速度信号精度大幅提高,其误差在2%以内,表明采用频率滤波法对虚拟振动台进行标定是可行的。
主题词:虚拟振动台频率滤波标定
1 前言
在多体动力学软件ADAMS中进行整车平顺性仿真分析时,通常有两种激励施加方式,一种是通过虚拟路面施加激励[1],另一种是通过虚拟振动台(下称振动台)施加激励[2]。虚拟路面一般根据路面不平度的统计数据生成,与实车测试路面存在差异,会影响模型对标精度;在振动台上采用实测加速度信号作为激励信号,可大幅提高模型对标精度。对于多轴重型商用车平顺性仿真而言,在ADAMS/View中创建整车模型、振动台及添加驱动比较直观方便,但在ADAMS/View中进行整车平顺性仿真时,由于整车模型缺少地面支撑,加速度信号不能作为激励信号直接驱动振动台,需要采用位移信号驱动。由于加速度-位移信号在转换过程中会存在一定误差,同时振动台本身也存在驱动误差,所以当给振动台施加位移驱动时,车辆加速度的仿真值与实测值之间会存在较大偏差,无法满足整车模型对标及平顺性仿真分析的要求。为此,本文提出一种频率滤波标定法对振动台进行标定,通过对振动台位移输入信号进行滤波处理降低振动台的驱动误差,提高振动台的驱动精度。
2 振动台驱动误差分析
为便于分析振动台驱动误差产生的原因,以由单个振动台构成的单自由度振动系统为例进行说明,振动系统由振动台和质量-弹簧系统组成。在ADAMS/View中建立一个振动台,振动台与地面之间建立垂直滑移副,其与弹簧连接位置作为信号输出点。根据某6×4重型牵引车前桥簧载质量和悬置刚度,分别设置簧上球体质量为1 597 kg、弹簧刚度为270 N/mm,组成的单自由度振动系统如图1所示,其输入信号是由实测的前桥轴头垂直振动加速度信号转换得到的位移信号。实测的轴头加速度信号是该车以车速为35 km/h(空载)在标准试验场进行道路试验时采集的,采样时间间隔为0.004 882 8 s,采样总时长为135 s,采样点数为27 648个。
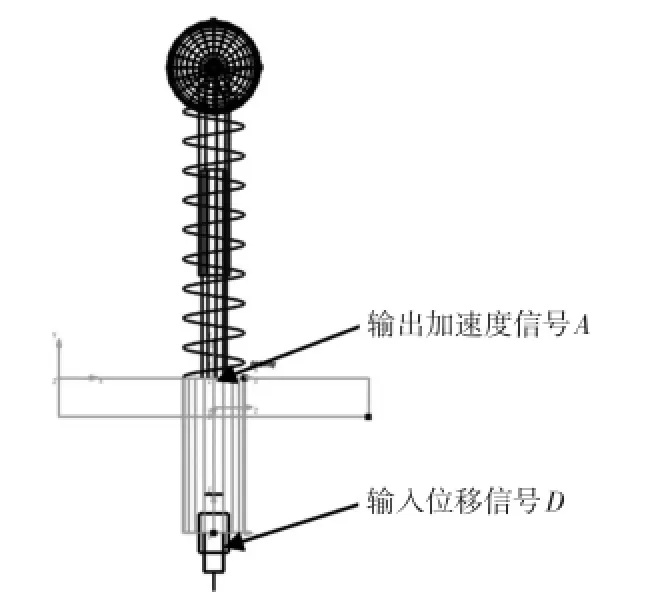
图1 单自由度振动系统模型
信号转换过程借助于MATLAB编程完成,采用参考文献[3]中提出的频域积分转换算法,最小截止频率设为0.5 Hz,最大截止频率为120 Hz。将加速度信号转换得到的位移信号定义为位移驱动函数,将位移驱动函数添加到滑移副中即可实现系统仿真计算。为保证加速度仿真计算的精度,仿真步长要与实车测试数据的采样时间间隔保持一致,为此设置仿真步长为0.004 882 8 s、仿真时长为135 s,仿真加速度信号与试验加速度信号对比结果如图2所示。
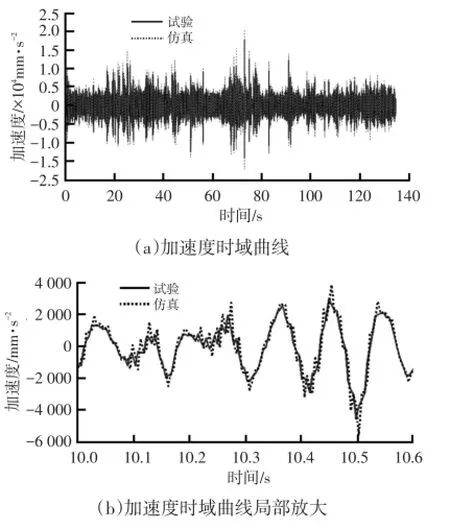
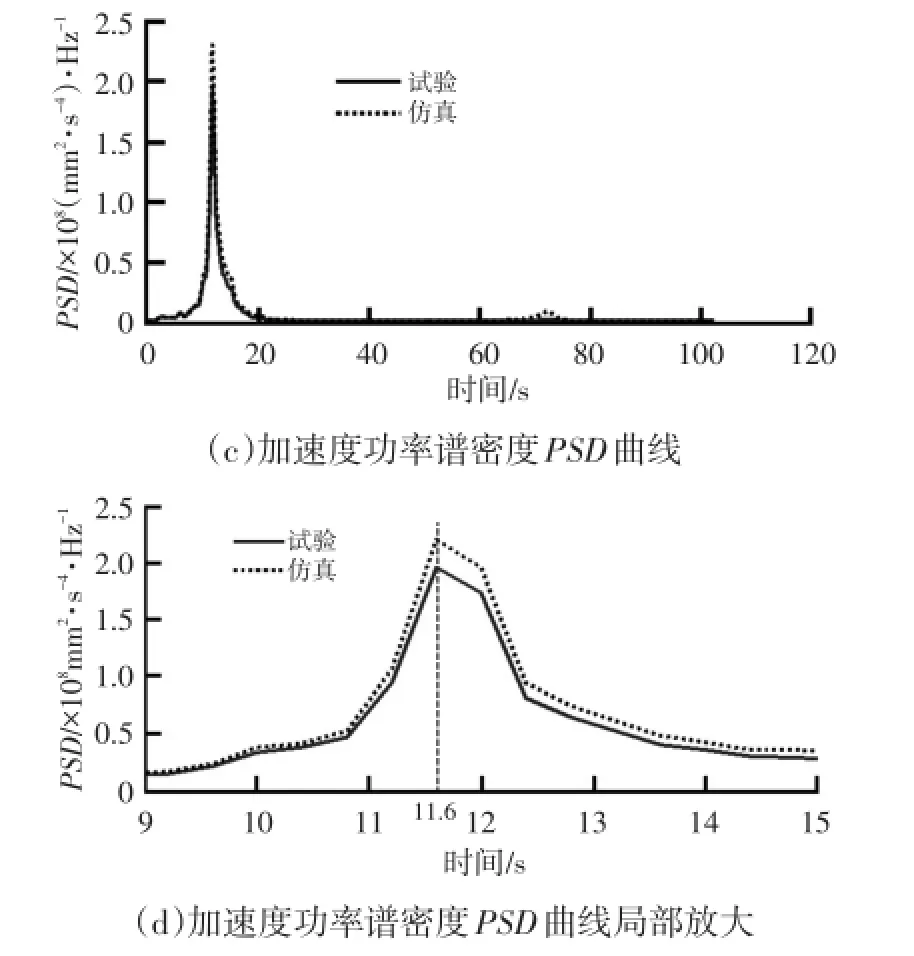
图2 仿真加速度与试验加速度曲线对比
从图2可看出,仿真加速度信号与实测加速度信号的时域峰值普遍存在较大差异,两者的加速度功率谱密度PSD曲线主要在峰值附近存在较大差异,此时仿真加速度均方根值增大,试验与仿真加速度信号对比如表1所列。

表1 试验加速度信号与仿真加速度信号数值对比
为分析试验与仿真误差产生的原因,以位移信号D为输入,分别以仿真加速度信号A、实测加速度信号A0为输出,在MATLAB中计算输出加速度信号—输入位移信号的频率响应特性(幅频特性)曲线,用以描述振动系统的传递特性,如图3所示。其中,实测加速度信号A0作为目标信号,其频响函数曲线称为目标传递特性,仿真加速度信号A频响函数曲线称为振动系统传递特性,无振动质量时仿真加速度信号A频响函数曲线称为振动台传递特性。

图3 振动系统加速度-位移幅频特性曲线对比
从图3可看出,3种传递特性曲线在频率为0~20 Hz范围内吻合度很高,在20~40 Hz内有一定差异,在40 Hz处相差接近10 dB,在40 Hz以上时差异明显增大。
由上述分析可知,振动台的驱动误差由振动台模型的计算误差、加速度-位移信号的转换误差、质量-弹簧系统的扰动误差3部分组成。因为,加速度信号转换为位移信号是通过频域积分算法实现,转换算法中的数据转换误差不能完全消除;振动台传递特性与目标传递特性曲线之间有差异,导致振动台模型存在计算误差;振动系统传递特性与目标传递特性之间有差异,导致质量-弹簧系统存在扰动误差。
振动系统传递特性幅值与目标传递特性幅值的差距(用增益表示)可作为设计滤波函数阻带衰减的参考值,增益α计算式为:

式中,H(A)为振动系统传递特性幅值;H(A0)为目标传递特性幅值。
3 振动台标定原理
振动台标定的目的是减小振动台的驱动误差,使振动台的输出加速度尽可能接近测试加速度。根据上述分析可知,振动系统应尽可能保留0~20 Hz的低频成分,剔除超过40 Hz的高频成分,因此可以对输入信号做1次频率滤波处理,即在位移输入信号与振动台之间增加1个滤波器,使振动系统传递特性接近目标传递特性,则可降低振动台的驱动误差。因此,振动台标定的关键是设计合适的频率滤波器。下面以单自由度振动系统为例说明振动台标定原理。从图3可看出,所设计的滤波器要尽可能保持0~20 Hz频率成分不变,抑制40 Hz以上的高频成分,即需要采用低通滤波器。
低通滤波器的传递函数G()s可表示为:

式中,di(i=0,1,…,N)为分子系数;cj(j=0,1,…,N)为分母系数;N为滤波器阶数。
G()s的不同幅频特性函数代表不同的低通滤波器原型[6]。振动台标定中主要考虑滤波器的幅频特性,对相频特性要求不高。这里选用常用的Butterworth低通滤波器原型设计低通滤波函数,因为Butterworth滤波器具有通带内最平坦的幅频特性,而且随着频率升高呈单调递减[6]。
Butterworth滤波器可以在ADAMS/PostProcessor模块中直接生成,该模块提供了连续滤波(Analog filtering)和离散(数值)滤波(Digital filtering)[4]两种滤波方法,由于本文所采用的试验数据是一系列离散数值,因此选用离散滤波方法。
在ADAMS/PostProcessor滤波器生成界面中,可根据滤波要求定义截止频率与通、阻带衰减量,自动生成滤波器阶数和传递函数系数,软件自动绘制滤波函数增益和相位的曲线。通过调整通、阻带起止频率与通、阻带衰减量可获得满意的滤波函数。
以单自由度振动系统为例介绍振动台的标定过程,标定流程如图4所示。

图4 振动台标定过程
根据对单自由度振动系统的误差分析可知,振动系统传递特性与目标传递特性幅值差距(增益)平均值为19 dB。在0~20 Hz频率范围内幅值基本吻合,设为滤波器通带,由于低通滤波器通带内允许波动范围一般不超过3 dB,且阶数越高其过渡带范围越狭窄[6,8],所以通带衰减量设为3 dB;在20~40 Hz频率范围内幅值差异很小,设为滤波器过渡带;频率为40 Hz以上时幅值差别较大,设为滤波器阻带,阻带衰减量设为19 dB。在ADAMS/PostProcessor滤波器生成界面中输入相关参数便可得到滤波函数,将滤波函数代入单自由度振动系统检验其精度,当误差较大时,可适当减小阻带衰减量,同时也可对截止频率进行微调。经调整后的滤波函数通带归一化拐角频率为0.194(19.9 Hz),阻带归一化起始频率为0.41(42 Hz),通带内波动范围为3 dB,阻带衰减量为15 dB,阶数为2。振动台经滤波标定后的仿真加速度信号与试验加速度信号对比结果如图5所示。
从图5可看出,标定后仿真加速度曲线与试验加速度曲线在时域和频域内吻合度均较高,滤波后信号存在少许时间延迟。标定后仿真加速度均方根值、PSD曲线峰值(11.6 Hz处,见图2)与测试值的相对误差均在1%以内,说明采用滤波方法对振动台进行标定是可行的。
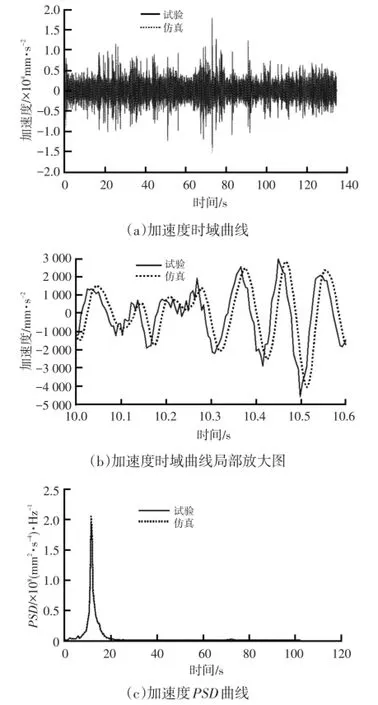
图5 振动台标定后试验加速度与仿真加速度对比结果
4 整车振动台标定方法
在三轴车辆整车模型标定中,需要建立6个振动台(每根车轴左、右两端各1个振动台)组成一个激振系统。对多个振动台进行标定时有两种方法,一种是对每个振动台独立进行标定,但由于各振动台的滤波函数均不相同,滤波延迟时间也不同,加之各振动台之间存在相互影响,因此不仅标定过程复杂,而且标定效果不理想;另一种方法是将所有振动台作为一个整体进行标定,所有振动台共用1个滤波函数,下面以某6×4重型牵引车为例介绍这种方法。
根据整车平顺性仿真要求,在ADAMS/View中建立了整车模型及6个振动台,如图6所示。为保证各车桥轴头与对应振动台输出的垂直振动加速度信号一致,弹性轮胎由惯性参数相同的刚体圆环代替。刚体圆环与车桥之间用固定副连接,与振动台之间用平面副连接,振动台作为位移信号输入端,车桥轴头作为加速度信号输出端。
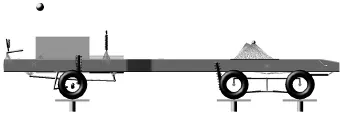
图6 整车平顺性仿真模型
整车多个振动台的标定过程与单自由度系统相似,区别在于:
a.需对各振动台分别进行误差分析,确定各振动台滤波器共同的通带、阻带与过渡带的频率范围。
b.需计算各车桥轴头(轮心)处传递特性与对应的目标传递特性幅值的差距(增益),取其平均值作为设计滤波函数的阻带衰减的参考值。
c.全部振动台作为一个整体进行标定,共用一个滤波函数,并使用低阶滤波函数。
以某6×4重型牵引车(空载)在35 km/h车速下的道路试验数据为例,介绍整车振动台的标定过程。首先确定各振动台滤波器共同的通带、阻带与过渡带的频率范围:由于各车桥轴头处传递特性幅值与对应的目标传递特性幅值均在0~30 Hz频率范围内基本吻合,故设为滤波器通带;因在频率为60 Hz处幅值差距接近10 dB,故设置60 Hz以上为阻带;设置30~60 Hz频率范围为滤波器过渡带。其次确定滤波器的阻带衰减量:由于各车桥轴头处传递特性幅值与对应的目标传递特性幅值差的平均值为17 dB,所以阻带衰减量的初始值设为17 dB。最后根据车桥轴头的加速度误差对截止频率和阻带衰减量进行微调,最终得到的滤波函数的通带归一化拐角频率为0.32(33 Hz),阻带归一化起始频率为0.59(60 Hz),通带内波动范围为3 dB,阻带衰减量为15 dB,阶数为2。标定后车桥轴头处仿真加速度时域曲线与试验加速度时域曲线对比如图7所示(以前桥左侧车桥轴头为例)。
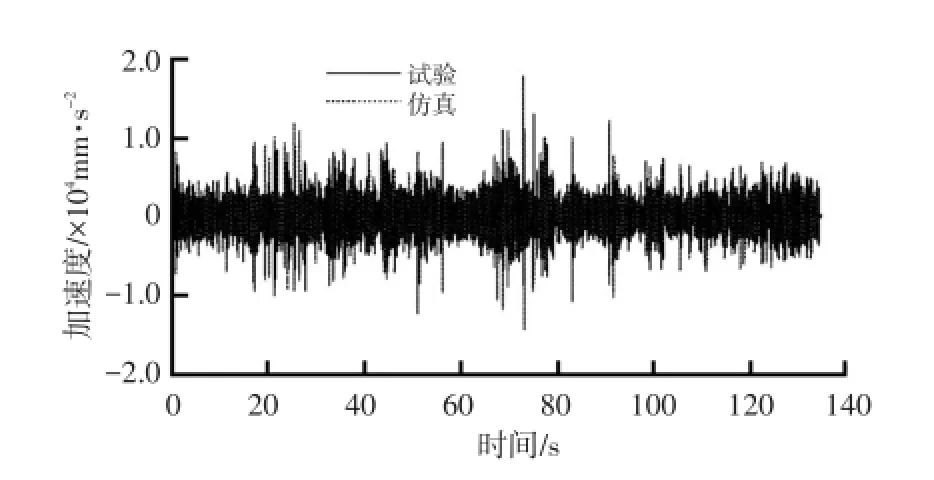
图7 整车激振系统标定后仿真与试验加速度时域曲线对比
由于加速度PSD曲线在频率为20 Hz以上时几乎与坐标轴重合,所以此处仅给出峰值附近(5~20 Hz范围)的仿真加速度PSD曲线与试验加速度PSD曲线,如图8所示(以前桥左侧车桥轴头为例)。
整车振动台标定前、后各车桥轴头仿真加速度信号的均方根值、PSD曲线在11.6 Hz处峰值与实测值之间的误差对比如表2所列。由表2可知,标定后仿真值的准确度大幅提高,相对误差均不超过2%,由此可知,采用频率滤波方法对整车振动台进行标定是可行的。

图8 整车振动台标定后仿真与试验加速度PSD曲线对比
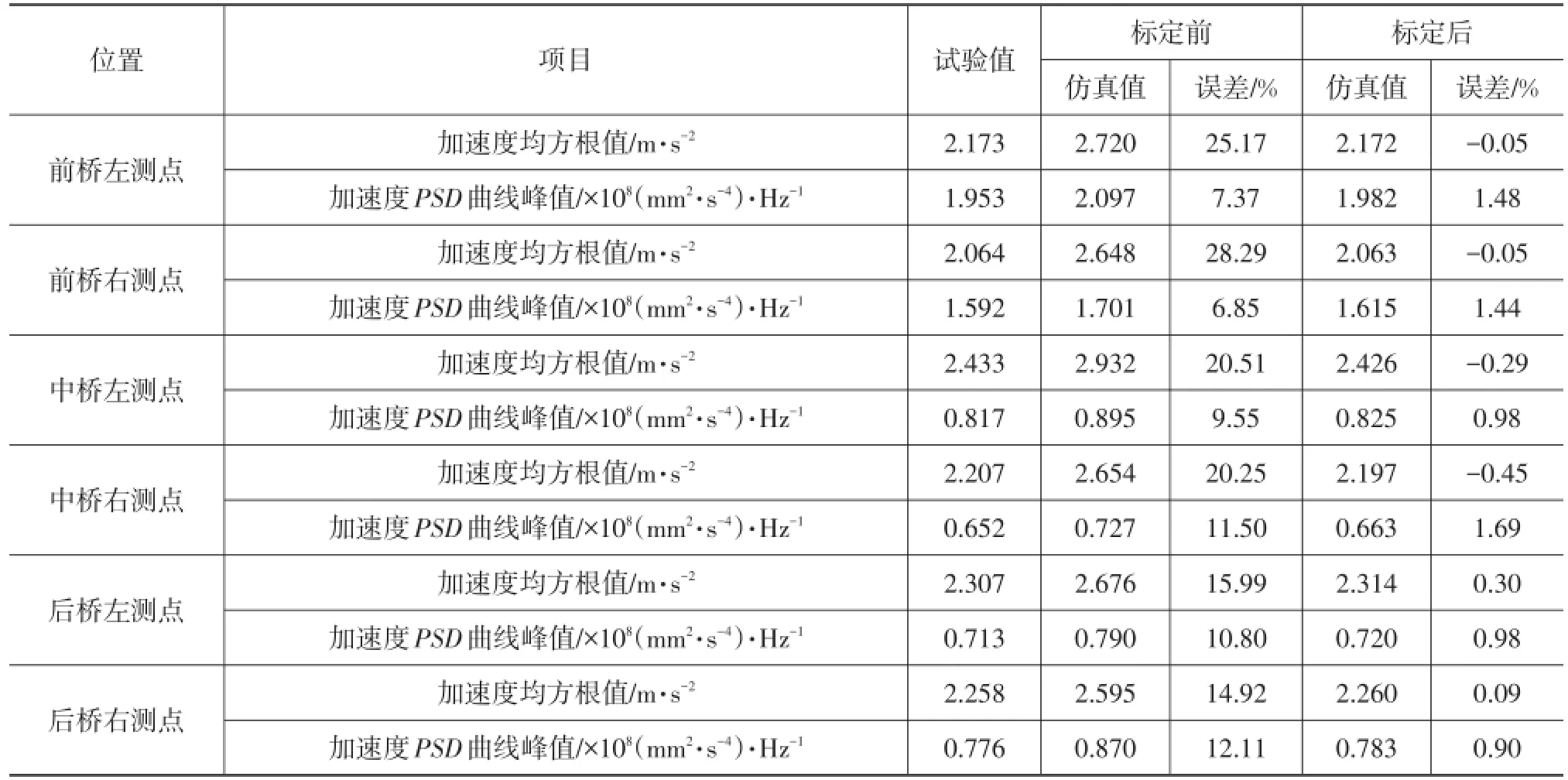
表2 整车振动台标定前、后结果对比
5 结束语
在ADAMS/View中创建虚拟振动台进行平顺性仿真分析时,如果采用实测车桥轴头垂直振动加速度信号通过数据转化为位移信号施加在振动台进行整车模型对标,需要对振动台进行标定,否则会影响整车模型的精度。本文提出了一种频率滤波法对振动台进行标定,该方法通过分析振动系统传递特性与目标传递特性之间的误差,确定滤波器的通带、阻带与过渡带的频率范围,生成用于标定的Butterworth低通滤波函数,对振动台输入位移信号进行滤波处理。通过对某6×4重型牵引车振动台标定表明,标定后各车桥轴头仿真加速度信号精度大幅提高,误差在2%以内,即采用频率滤波方法对整车振动台进行标定是可行的,且具有较高的对标精度。
参考文献
1常媛媛,雍文亮,李亮,等.随机路面下重型牵引车平顺性分析与优化.客车技术,2013(2):10~14.
2徐梦茹.基于ADAMS的刚柔耦合整车模型平顺性仿真分析与优化:[硕士论文].合肥:合肥工业大学,2013.
3王济,胡晓.MATLAB在振动信号处理中的应用.北京:中国水利水电出版社,2006.
4赵武云,刘艳研,吴建民,等.ADAMS基础与应用实例教程.北京:清华大学出版社,2012.
5Miroslav D Lutovac,Dejan V Tošic,Brian L Evans.Filter Design for Signal Processing Using MATLAB and Mathemat⁃ica.Upper Saddle River,N.J.:Prentice Hall,2001.
6宗长富,陈双,冯刚,等.基于频率加权滤波的汽车平顺性评价.吉林大学学报(工学版),2011,41(6):1517~1521.
7胡广书.数字信号处理—理论算法与实现(第2版).北京:清华大学出版社,2003.
(责任编辑文楫)
修改稿收到日期为2016年3月30日。
中图分类号:U461.4
文献标识码:A
文章编号:1000-3703(2016)07-0044-05
Research on the Calibration Method of Virtual Vibration Rig Based on ADAMS/View
Chen Yanlong,Yang Qiliang,Hu Li,Gong Yaqi
(Wuhan University of Science and Technology,Wuhan 430081)
【Abstract】The virtual vibration rig created in ADAMS/View should be calibrated for vehicle ride comfort simulation and analysis.In this research,with a 6×4 heavy tractor as research object,a frequency filtering calibration method of the input displacement signal for the virtual vibration rig is proposed through analyzing the error between the transfer characteristics and the target transfer characteristics of the vibration system of the virtual vibration rig,then based on Butterworth low-pass filter,the calibration filtering function is generated.The comparison with vehicle test data shows that the accuracy of vertical acceleration signals simulated of axle ends is greatly improved after the vehicle vibration system is calibrated and its error is less than 2%,which proves feasibility of this method in the calibration of virtual vibration rig.
Key words:Virtual vibration rig,Frequency filtering,Calibration
猜你喜欢
客联(2022年4期)2022-07-06
成都信息工程大学学报(2022年2期)2022-06-14
汽车电器(2021年8期)2021-08-24
汽车电器(2021年7期)2021-08-04
商品与质量(2021年6期)2021-04-01
上海航天(2021年1期)2021-03-04
汽车维修与保养(2020年11期)2020-06-09
电子制作(2019年11期)2019-07-04
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
