
履带车辆电传动转向性能半实物仿真分析
2016-09-14 01:39马田,刘翼,张欣,万帆
车辆与动力技术 2016年1期
马 田, 刘 翼, 张 欣, 万 帆
(中国北方车辆研究所,北京 100072)
履带车辆电传动转向性能半实物仿真分析
马田,刘翼,张欣,万帆
(中国北方车辆研究所,北京 100072)
针对双电机耦合驱动的履带车辆,提出了基于模型参考的自适应转向控制方法,实现车辆转向的动态补偿控制,建立了转向性能仿真模型,构建了转向性能半实物仿真平台,在柏油路和农村松软路两种路面下,进行车辆转向性能半实物仿真.结果表明,双电机耦合驱动的履带车辆相对转向半径误差较小,转向稳定性好.
双电机耦合驱动;转向性能;半实物仿真
从国内外坦克装甲车辆混合动力电传动技术发展趋势和国外发展现状来看,机电复合传动在军用车辆的应用日益广泛,正朝着高效、高功率密度、节能、高机动性等目标发展,具有较好的发展前景,已经成为军用车辆传动技术的重要发展方向.履带车辆的传动装置兼具转向功能,且转向一直是各国履带车辆机电复合传动研究的重点并各具特色[1].双电机独立驱动方案是电传动的基本方案之一,其转向性能受到了关注.翟丽等作者针对双侧独立驱动的电传动履带车辆,建立了基于无功功率感应电机模型参考自适应控制(MRAC)的电子差速转向控制策略[2].刘翼等作者同样针对双侧独立驱动的电传动履带车辆,提出了一种适应于转向阻力变化的转向控制策略[3].双电机耦合驱动的机电复合传动是一种在双电机独立驱动方案中加入功率耦合机构,将变速和转向功能有机耦合在一起的履带车辆机电复合传动形式,系统结构框图如图1所示.该结构相对简单,通过机械结构解决了双侧电驱动转向再生功率循环,降低了电机功率需求.

图1 双电机耦合驱动系统框图
本研究针对双电机耦合驱动的履带车辆,提出了基于模型参考的转向自适应控制方法,进行车辆转向的动态补偿控制,建立了转向性能仿真模型,构建了转向性能半实物仿真平台,在柏油路和农村松软路两种路面下,进行车辆转向性能半实物仿真验证.仿真结果表明,双电机耦合驱动的履带车辆的转向性能达到了预期效果,为双电机耦合驱动系统转向控制策略的制定提供参考依据.
1 转向控制方法
针对驱动电机不同的驱动指令,整车控制策略分为扭矩控制策略和转速控制策略两种.由于转速指令与目标驱动扭矩之间是一种非线性关系,利用传统PID算法精确解算扭矩值具有一定难度.实际转向时,转向阻力可能非线性大幅突变,仅用常规的反馈控制方法可能无法得到满意的控制效果.利用自适应控制方法能够解决一些常规的反馈控制所不能解决的复杂控制问题,能大幅度地提高系统的稳定精度和跟踪精度[4].随着现代控制理论的发展,出现了各种形式的自适应控制系统,其中模型参考自适应控制无论从理论研究还是从实际应用都已趋向成熟.因此,双电机耦合驱动履带车辆转向控制,采用基于模型参考自适应控制方法来实现.控制结构如图2所示,主要包含参考系统、等效输入计算、动态补偿反馈控制和实际系统4个部分[5].

图2 转向负载动态补偿控制结构
参考系统是针对驾驶员的期望角速度ω*,求取理想的期望转向角速度响应ωm;等效输入计算,是针对转向动力学的非线性特点,将期望车速v*和期望角速度ω*等效变换为计算等效输入r,以保证基于模型参考的自适应控制对系统模型输入的基本要求;反馈控制则是针对理想期望转向角速度响应ωm和实际系统的角速度响应ωp、计算等效输入r进行积分反馈,以调节r获得新的输入u,从而作用于实际系统; ωp是自适应控制的反馈参考.
通过自适应控制律的调节作用,使得ωm和ωp的偏差e0能够迅速收敛.当转向负载突变时,ωp能够较好地跟随ωm,车辆的转向响应和稳定性得到改善.
2 仿真模型
双电机耦合驱动电传动系统转向性能仿真模型主要包括发动机-发电机组模型、电池模型、电机驱动系统模型、行星机构模型、驾驶员模型(信号输入)、控制系统模型、车辆动力学模型、负载等效模型,等等.仿真模型如图3所示.
发动机-发电机组模型采用Map图模型,借助查表和插值的方法, 建立发动机-发电机组的输入输出数学模型;电池模型采用RC模型,能够反映电池的动态特性,可以模拟电池的外特性、过充、过放等;电机驱动系统可模拟电机输出扭矩和转速,模拟电机驱动电流,模拟实现电机的启动过程,等等;行星机构模型直接使用Simdriveline中的相关模块,如行星传动齿轮、离合器、制动器等来实现,参照传动简图,将各模块的端口相连接,然后按照实际系统配置输入相应参数;控制系统模型采用上文提出的基于模型参考的自适应转向控制模型;驾驶员模型在离线仿真阶段赋恒定值,在半实物仿真阶段用硬件接口关系代替,对I/O进行配置,使其与驾驶员操作装置关联;车辆动力学模型采用考虑滑转滑移的动态分析模型;负载模型采用随机扰动时变值.
3 半实物仿真平台构建
在进行离线仿真确定仿真模型的正确性之后,进行快速控制原型的开发,保留需要下载到半实物仿真系统中的模块,用硬件接口关系代替原来的逻辑连接关系,对I/O接口进行配置,设定软硬件中断优先级,对系统进行半实物仿真,验证控制算法的有效性[6].
半实物仿真平台如图4所示,驾驶员输入设备包括方向盘、油门踏板、制动踏板、换挡手柄,半实物仿真机采用dSPACE半实物仿真平台.利用真实的方向盘、油门踏板等操纵系统将驾驶员操作指令输入,同时转换为输入信号输入综合控制器,综合控制器运行控制算法解算出两个电机的目标扭矩指令,发送给dSPACE中的系统模型,进行双电机耦合驱动转向性能半实物仿真.
4 半实物仿真验证
在柏油路和农村松软路两种路面下,通过油门踏板和方向盘配合,进行车辆转向性能半实物仿真.
1)农村松软路仿真.
在0~40 s区间油门踏板稳定在0.4,同时在20~30 s区间方向盘稳定在0.4,进行一组中等半径转向输入;在40~80 s区间油门踏板稳定在0.2,同时在50~70 s区间方向盘稳定在0.6左右,进行一组小半径转向输入.
2)柏油路仿真.
在80~150 s区间油门踏板稳定在0.6,同时在120~130 s区间方向盘稳定在0.2左右,进行一组大半径转向输入,信号输入见图5.
在此输入条件下,对比两侧电机目标扭矩及实际输出扭矩(见图6、图7)、目标相对转向半径及仿真输出相对转向半径(见图8)、目标车速及仿真车速(见图9)以及转向功率平衡曲线(见图10).
第一次转向时是在困难路面下,目标车速稳定在30 km/h左右,到第20 s开始转向,目标相对转向半径为8.6,实现的相对转向半径为9.4(图8);第二次转向也是在困难路面进行的,目标车速稳定在9 km/h左右,在第50 s时进行目标相对转向半径为3.9的转向,实现的相对转向半径为4.2;第三次转向是在良好路面下,车速稳定在47 km/h左右,进行目标相对转向半径为27.4的转向,车辆实现的相对转向半径为27.9。半实物仿真结果表明,双电机耦合驱动的履带车辆相对转向半径误差较小,最小误差可控制在2%以内,转向稳定性良好.

图5 踏板和方向盘信号
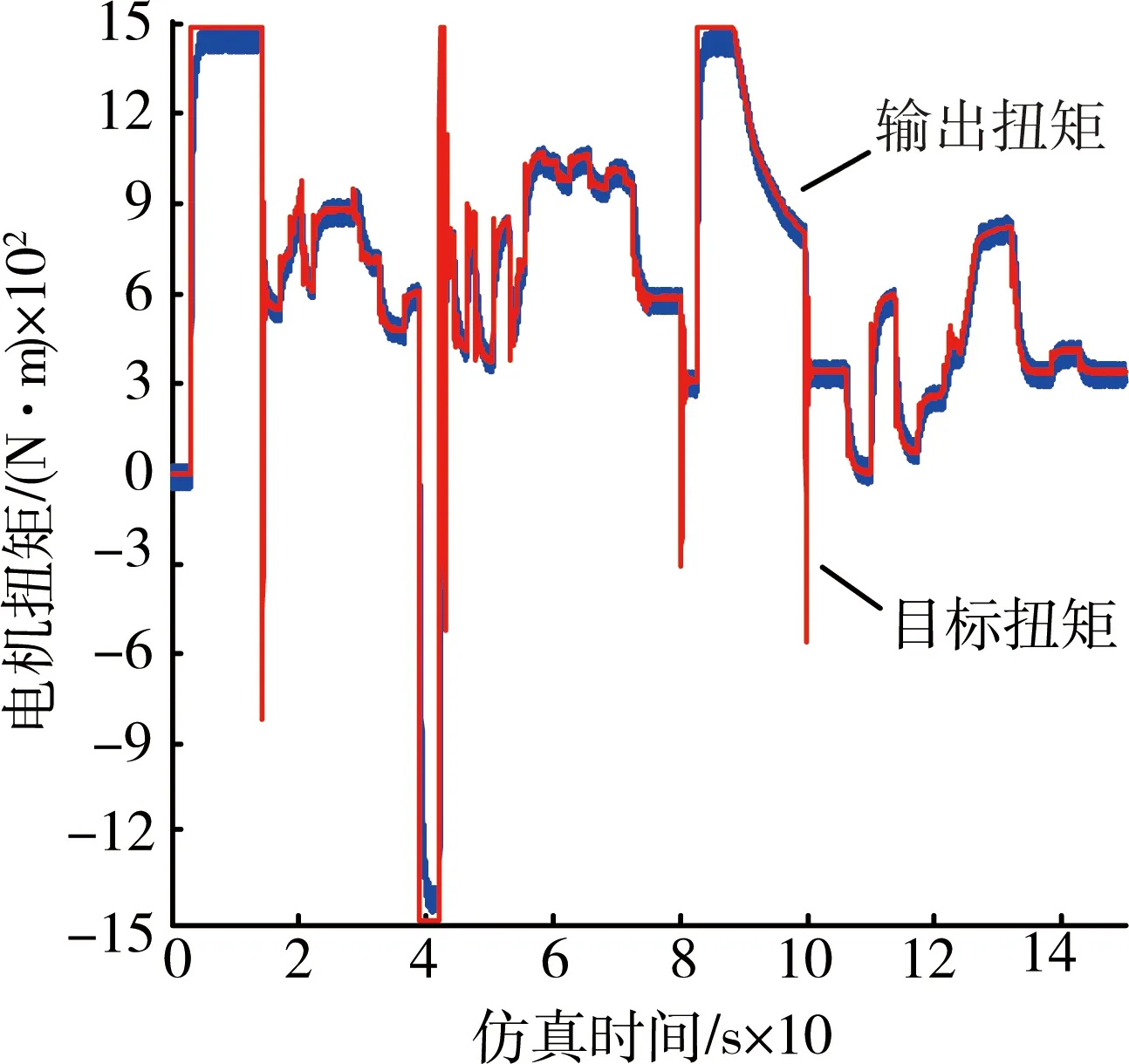
图6 左侧电机的目标扭矩及输出扭矩

图7 右侧电机的目标扭矩及输出扭矩
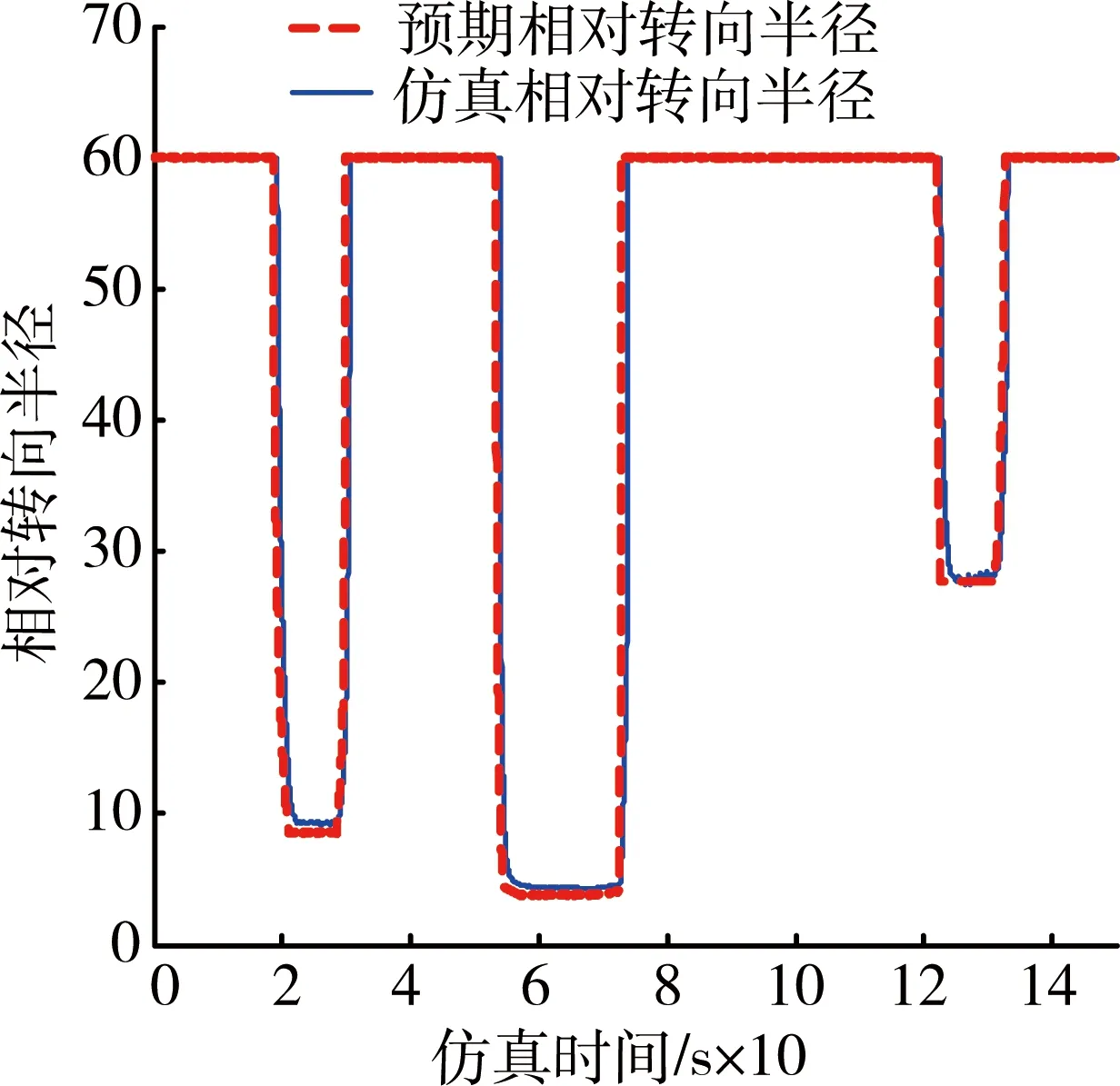
图8 目标相对转向半径及仿真结果

图9 目标车速及仿真车速

图10 转向功率平衡
5 结 论
1)应用半实物仿真平台可以很好地验证双电机耦合驱动的履带车辆的转向控制策略的可实现性;
2)从模拟困难路面、良好路面下的车速、相对转向半径、电机输出扭矩、转向功率平衡曲线等半实物仿真结果来看,双电机耦合驱动的履带车辆相对转向半径误差较小,表明在半实物仿真条件下,转向稳定性好,为转向控制策略的制定提供参考依据.
[1]方志强,高连华,王红岩.履带车辆转向性能指标分析及实验研究[J].装甲兵工程学院学报,2005年,19(4):47-50.
[2]翟丽,孙逢春,谷中丽,等.电传动履带车辆电子差速转向控制策略[J].北京理工大学学报,2009,29(2):113-117.
[3]刘翼,盖江涛,陈泳丹,等.电传动履带车辆转向自适应控制策略仿真分析[J].车辆与动力技术,2015,(1):5-10.
[4]翟丽,孙逢春,谷中丽.电子差速履带车辆转向转矩神经网络PID控制[J]. 农业机械学报,2009,40(2):1-5.
[5]刘翼,毛明,马晓枫,等.零差速电传动履带车辆转向负载自适应控制策略研究[J].车辆与动力技术,2013,(1):7-11.
[6]盖江涛,黄守道,周广明,等.双电机耦合驱动履带车辆自适应滑模转向控制[J].兵工学报,2015,(3):405-411.
Semi-physical Simulation Analysis of Steering Performance of Electric Vehicles
MA Tian,LIU Yi,ZHANG Xin,WAN Fan
(China North Vehicle Research Institute, Beijing 100072, China)
Based on double side motors coupling drive transmission for tracked vehicles, the self-adaptive steering control method based on model reference has been put forward. This reached dynamic compensated control. Simultaneously, simulation model of steering performance is proposed,and semi-physical simulation platform for steering performance is established. The result of semi-physical simulation under blacktop and country road indicated that the relative steering radius error of double side motor coupling driven vehicle is very small, the steering stability of the vehicle is improved, which provides a reference to put forward steering control strategy for double side motor coupling driven vehicle.
double side motor coupling drive; steering performance; semi-physical simulation
1009-4687(2016)01-0035-05
URL: http://www.cnki.net/kcms/detail/11.4493.TH.20150928.1039.004.html
2015-03-16.
10.16599/j.cnki.1009-4687.20150928.002
马田(1982- ),女,副研究员,研究方向为车辆电传动.
TJ81+0.323;TP391.77
A
猜你喜欢
中学生数理化·中考版(2022年10期)2022-11-10
石油化工建设(2019年6期)2020-01-16
作文小学中年级(2018年10期)2018-10-29
电子制作(2018年1期)2018-04-04
林业工程学报(2017年4期)2017-08-07
湖南农业(2016年3期)2016-06-05
自动化学报(2016年8期)2016-04-16
西北工业大学学报(2015年1期)2016-01-19
哈尔滨师范大学自然科学学报(2015年6期)2015-04-23
哈尔滨师范大学自然科学学报(2015年6期)2015-04-23
